一种双孢菇采摘装置控制系统和控制方法
1.本技术涉及农业工程技术领域,尤其涉及一种双孢菇采摘装置控制系统和控制方法。
背景技术:
2.双孢蘑菇可食用,味道鲜美,是一种低热量的健康食品,其蛋白质含量高达42%(干重)。
3.通过对人工采摘蘑菇过程进行研究,将其步骤进行如下划分(如图1所示):通过观察选择成熟待采的目标蘑菇,将手移动至待采蘑菇处,用手采下蘑菇,然后,使用另一只手中的切根刀切去蘑菇带有培养土的根部(有时采摘工人会一次采集多个蘑菇后再一次性切除这些蘑菇的根部),最后将处理完毕的蘑菇放入收集盒。
4.然而,在工厂化种植模式中,人工采摘环节仍占用全部蘑菇生产用工量60%以上,且蘑菇人工采摘劳动强度高、效率低、成本高,极大制约了蘑菇产业的进一步发展。因此,蘑菇产业亟需一种可以替代人工的蘑菇采摘设备及控制系统。但目前的蘑菇采摘技术识别度、精准度和采摘率均比较低。
技术实现要素:
5.本发明目的是为了解决现有蘑菇采摘技术识别度、精准度和采摘率均比较低的问题,提供了一种双孢菇采摘装置控制系统和控制方法。
6.本发明是通过以下技术方案实现的,本发明一方面,一种双孢菇采摘装置控制系统,所述系统包括:电控回路和气动回路;
7.电控回路包括主控制器、采摘模块、根切模块、移动模块和视觉模块,采摘模块、根切模块、移动模块、视觉模块分别与主控制器连接;
8.所述视觉模块用于获取的待采蘑菇位置信息,并将所述待采蘑菇位置信息发送至主控制器;
9.所述主控制器用于根据所述待采蘑菇位置信息,控制采摘模块、根切模块和移动模块;
10.所述采摘模块包括采摘电机、电机驱动a、二位三通换向阀、继电器a和拉压传感器,其中,
11.所述电机驱动a分别与主控制器和采摘电机相连,用于控制采摘电机并调整采摘模块的倾斜角度;
12.所述继电器a分别与主控制器和二位三通换向阀相连,用于控制二位三通换向阀线圈的通断电;
13.所述拉压传感器与主控制器相连,根据所述拉压传感器所采集的信号控制采摘模块采摘动作的开关量;
14.所述根切模块包括三位五通换向阀2、继电器b、继电器c和光电传感器组,其中,
15.所述继电器b分别与主控制器和三位五通换向阀2的线圈1相连;
16.所述继电器c分别与主控制器和三位五通换向阀2的线圈2相连;
17.所述光电传感器组与主控制器相连,用于检测其根部感应区域内是否有障碍物,并用于启动或结束根切模块的根切动作;
18.所述移动模块用于对所述采摘模块进行移动;
19.所述气动回路包括气泵、过滤-调压-润滑单元、四位流量控制阀座、z向双作用气压缸、根切双作用气压缸、负压发生器和吸盘,其中,
20.所述过滤-调压-润滑单元进气口与气泵相连,其出气口分别与三位五通换向阀1、三位五通换向阀2、两位三通换向阀进气口相连;
21.所述三位五通换向阀1的两个出气孔通过四位流量控制阀座连接至z向双作用气压缸两端;
22.所述三位五通换向阀2的一个出气孔通过四位流量控制阀座连接至根切双作用气压缸的一个进气口,所述三位五通换向阀2的另一出气孔直接与根切双作用气压缸的另一进气口相连;
23.所述两位三通换向阀通过四位流量控制阀座连接至负压发生器进气口;
24.所述吸盘安装在负压发生器一端。
25.进一步地,所述系统还包括手动控制模块,所述手动控制模块与主控制器连接,用于手动控制采摘模块、根切模块和移动模块。
26.进一步地,所述视觉模块包括摄像头和上位机所述摄像头与上位机连接,所述上位机与主控制器相连;
27.所述摄像头用于获取蘑菇图像,并将所述蘑菇图像发送至所述上位机;
28.所述上位机用于处理所述蘑菇图像,获取待采蘑菇位置信息,并将使所述待采蘑菇位置信息发送至所述主控制器。
29.进一步地,所述待采蘑菇位置信息包括但不限于二维坐标(x,y)、倾斜角度α和采摘方向β。
30.进一步地,所述系统还包括气压传感器,所述气压传感器与主控制器相连,所述气压传感器串联在四位流量控制阀座与负压发生器之间,用于实时测量并显示气压。
31.进一步地,所述移动模块包括电机驱动b、电机驱动c、电机驱动d、电机驱动e、继电器d、继电器e、x向电机、y向电机1、y向电机2、z轴旋转电机和三位五通换向阀1,其中,
32.所述电机驱动b分别与主控制器和x向电机相连,用于控制x向电机实现采摘模块在x向上的位移;
33.所述电机驱动c分别与主控制器和y向电机1相连,所述电机驱动d分别与主控制器和y向电机2相连,用于控制y向电机2实现采摘模块在y向上的位移;
34.所述电机驱动e分别与主控制器和z轴旋转电机相连,用于控制z轴旋转电机实现采摘模块围绕z轴的旋转;
35.所述继电器d分别与主控制器和三位五通换向阀1的线圈1相连,所述继电器e分别与主控制器和三位五通换向阀1的线圈2相连,用于控制采摘模块沿z轴的位移。
36.进一步地,所述系统还包括蘑菇培养架,所述电控回路和所述气动回路安装于所述蘑菇培养架上。
37.另一方面,本发明提供基于如上文所述的一种双孢菇采摘装置控制系统的双孢菇采摘装置控制方法,所述方法包括:
38.s1、启动双孢菇采摘装置控制系统;
39.s2、视觉模块中的摄像头获取蘑菇图像;
40.s3、通过视觉模块中的上位机对获取的蘑菇图像进行处理,选择蘑菇丛中的成熟待采蘑菇,并计算待采其二维坐标((x,y))、倾斜角度α以及采摘方向角β;
41.s4、通过视觉模块中的上位机将计算所得数据传输至主控制器;
42.s5、主控制器根据二维坐标((x,y)),通过电机驱动b、c、d控制x向电机、y向电机1及y向电机2将采摘模块移动至待采蘑菇上方;
43.s6、主控制器通过电机驱动e控制z向旋转电机将采摘模块绕z轴旋转至采摘方向角β;
44.s7、主控制器通过电机驱动a控制采摘机电将采摘模块旋转至倾斜角度α;
45.s8、主控制器通过继电器d向三位五通换向阀1的线圈1通电,控制z向双作用气压缸带动采摘模块向下靠近待采蘑菇;
46.s9、检测拉压传感器所受压力是否达到预设值检测到压力值说明吸盘已接触到蘑菇菌盖、,若达到预设值则进入下一步,若未达到则返回s8;
47.s10、主控制器通过继电器a向二位三通换向阀的线圈1上电,使负压发生器在吸盘处产生负压,并实现吸盘对蘑菇菌盖的抓取;
48.s11、主控制器通过电机驱动a控制采摘机电将采摘模块继续旋转至最大倾斜角度γ此值为预设值,当采摘模块倾斜角度达到该值时认为蘑菇已被采下、;
49.s12、主控制器通过继电器e向三位五通换向阀1的线圈2通电,控制z向双作用气压缸带动采摘模块及已采下蘑菇向上运动,同时,主控制器通过电机驱动a控制采摘机电将采摘模块的倾斜角度复位;
50.s13、检测拉压传感器所受拉力是否达到蘑菇平均重量
±
标准差,若达到则进行下一步,若未达到,则认为采摘失败并返回s7进行二次采摘;
51.s14、主控制器通过电机驱动b、c、d控制x向电机、y向电机1及y向电机2将采摘模块及采获蘑菇移动至根切模块;
52.s15、主控制器检测根切模块的光电传感器组信号,若信号被阻断,则主控制器通过继电器b向三位五通换向阀1的线圈1通电,使根切双作用气压缸带动刀片切断蘑菇根部,随后主控制器通过继电器c向三位五通换向阀1的线圈2通电,根切双作用气压缸复位;若未检测到信号,返回s14;
53.s16、检测拉压传感器所受拉力,并记录蘑菇重量;
54.s17、主控制器通过电机驱动b、c、d控制x向电机、y向电机1及y向电机2将采摘模块及处理完毕的蘑菇移动至收集盒;
55.s18、主控制器对继电器a断电,吸盘失去对蘑菇的吸力,蘑菇在重力作用下落入收集盒;
56.s19、检测是否接收到采摘终止信号,若未接收到,返回s2,若接收到则采摘结束。
57.进一步地,在所述s13中,设置采摘的设定次数,若超过所述设定次数,则放弃对当前待采蘑菇的采摘;否则,返回s7。
58.本发明的有益效果:1、本发明所提供的双孢菇采摘装置控制系统及控制方法能够实现对成熟待采蘑菇的识别,且对于长势良好的蘑菇(生长方向竖直向上)仅需获取其xoy 平面内的二维坐标,其z向位置可由拉压传感器确定,大大简化了计算量;对于倾斜生长的蘑菇,可以通过本发明的视觉模块获取其倾斜角度,并在采摘前,将采摘模块旋转至该角度再进行采摘。
59.2、本发明可以获取蘑菇的采摘方向角,对于丛生、密度较高的蘑菇,可实现更高的采摘成功率、采净率。
60.3、本发明配备有视觉模块(相当于人眼)、移动模块(相当于人体手臂、关节)、采摘模块(相当于人手)、根切模块(相当于人手)、主控制器(人脑),可以实现全自动化的蘑菇采摘、降低蘑菇生产成本,有效打破当前人力资源短缺的困境,解决了蘑菇生产全自动化的最关键一环。
61.本发明适用于对丛生、密度较高的蘑菇进行采摘。
附图说明
62.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
63.图1是蘑菇人工采摘过程;
64.图2是蘑菇采摘机器人工作过程;
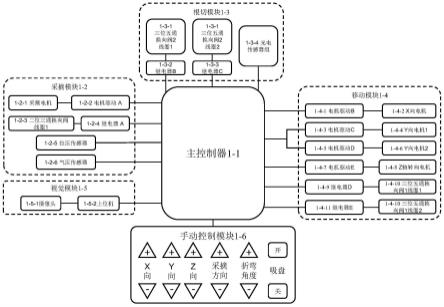
65.图3是本发明的双孢菇采摘装置电控回路;
66.图4是本发明的双孢菇采摘装置控制系统轴测图;
67.图5是本发明的摄像头获取的待采蘑菇二维坐标、采摘方向角示意图;
68.图6是本发明的摄像头获取的倾斜角度示意图;
69.图7是本发明的采摘模块示意图;
70.图8是本发明的根切模块示意图;
71.图9是本发明的根切模块工作示意图;
72.图10是本发明的移动模块示意图;
73.图11是本发明的气动回路;
74.图12是本发明的采摘模块在z轴旋转电机作用下转至采摘方向角β的示意图;
75.图13是本发明的采摘模块在采摘电机作用下倾斜至倾斜角度α的示意图;
76.图14是本发明的采摘模块吸盘在抓取蘑菇状态下旋转至最大倾斜角度γ的示意图;
77.图15是的双孢菇采摘装置控制方法流程图;
78.图中:1、电控回路;2、气动回路;1-1、主控制器;1-2、采摘模块;1-3、根切模块;1-4、移动模块;1-5、视觉模块;1-6、手动控制模块;2-1、气泵;2-2、过滤-调压-润滑单元;2-3、四位流量控制阀座;2-4、z向双作用气压缸;2-5、根切双作用气压缸;2-6、负压发生器;2-7、吸盘;1-2-1、采摘电机;1-2-2、电机驱动a;1-2-3、二位三通换向阀;1-2-4、继电器a;1-2-5、拉压传感器;1-2-6、气压传感器;1-3-1、三位五通换向阀2;1-3-2、继电器b;1-3-3、继电器c;1-3-4、光电传感器组;1-4-1、电机驱动b;1-4-2、x向电机;1-4-3、电机驱动c;1-4-4、y向
电机1;1-4-5、电机驱动d;1-4-6、y向电机2;1-4-7、电机驱动e;1-4-8、z轴旋转电机;1-4-9、继电器d;1-4-10、三位五通换向阀1;1-4-11、继电器e。
具体实施方式
79.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
80.实施方式一、如图2-14所示,一种双孢菇采摘装置控制系统,所述系统包括:电控回路和气动回路;
81.如图3所示,电控回路包括主控制器、采摘模块、根切模块、移动模块和视觉模块,采摘模块、根切模块、移动模块、视觉模块分别与主控制器连接;
82.所述视觉模块用于获取的待采蘑菇位置信息,并将所述待采蘑菇位置信息发送至主控制器;
83.所述主控制器用于根据所述待采蘑菇位置信息,控制采摘模块、根切模块和移动模块;
84.所述采摘模块包括采摘电机、电机驱动a、二位三通换向阀、继电器a和拉压传感器,其中,
85.所述电机驱动a分别与主控制器和采摘电机相连,用于控制采摘电机并调整采摘模块的倾斜角度;
86.所述继电器a分别与主控制器和二位三通换向阀相连,用于控制二位三通换向阀线圈的通断电;
87.所述拉压传感器与主控制器相连,根据所述拉压传感器所采集的信号控制采摘模块采摘动作的开关量;
88.所述根切模块包括三位五通换向阀2、继电器b、继电器c和光电传感器组,其中,
89.所述继电器b分别与主控制器和三位五通换向阀2的线圈1相连;
90.所述继电器c分别与主控制器和三位五通换向阀2的线圈2相连;
91.所述光电传感器组与主控制器相连,用于检测其根部感应区域内是否有障碍物,并用于启动或结束根切模块的根切动作;
92.所述移动模块用于对所述采摘模块进行移动;
93.所述气动回路包括气泵、过滤-调压-润滑单元、四位流量控制阀座、z向双作用气压缸、根切双作用气压缸、负压发生器和吸盘,其中,
94.所述过滤-调压-润滑单元进气口与气泵相连,其出气口分别与三位五通换向阀1、三位五通换向阀2、两位三通换向阀进气口相连;
95.所述三位五通换向阀1的两个出气孔通过四位流量控制阀座连接至z向双作用气压缸两端;
96.所述三位五通换向阀2的一个出气孔通过四位流量控制阀座连接至根切双作用气压缸的一个进气口,所述三位五通换向阀2的另一出气孔直接与根切双作用气压缸的另一进气口相连;
97.所述两位三通换向阀通过四位流量控制阀座连接至负压发生器进气口;
98.所述吸盘安装在负压发生器一端。
99.本实施方式中,能够实现对成熟待采蘑菇的识别,且对于长势良好的蘑菇(生长方向竖直向上)仅需获取其xoy平面内的二维坐标,其z向位置可由拉压传感器确定,大大简化了计算量;对于倾斜生长的蘑菇,可以通过本发明的视觉模块获取其倾斜角度,并在采摘前,将采摘模块旋转至该角度再进行采摘。
100.实施方式二,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,具体包括:所述系统还包括手动控制模块,所述手动控制模块与主控制器连接,用于手动控制采摘模块、根切模块和移动模块。
101.本实施方式中,在双孢菇采摘装置控制系统加入了手动控制模块,可以灵活选择对双孢菇的采摘方式,不局限于与自动,还可以选择手动的方式实现对双孢菇的采摘。例如,手动控制模块可通过按钮来实现实现采摘模块、根切模块、移动模块的相应动作,如图3所示,手动控制模块包括分别在x、y和z向上移动的按钮、采摘方向按钮、折弯角度按钮和吸盘开关按钮。
102.实施方式三,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,本实施方式中,对视觉模块做了进一步限定,具体包括:所述视觉模块包括摄像头和上位机所述摄像头与上位机连接,所述上位机与主控制器相连;
103.所述摄像头用于获取蘑菇图像,并将所述蘑菇图像发送至所述上位机;
104.所述上位机用于处理所述蘑菇图像,获取待采蘑菇位置信息,并将使所述待采蘑菇位置信息发送至所述主控制器。
105.本实施方式中,可以将摄像头设于蘑菇培养架上方且正对蘑菇,实现全方位对待采的蘑菇区域进行拍摄,再通过上位机对摄像头获取的蘑菇图像进行处理,该处理包括但不限于选取成熟待采的目标蘑菇,计算该目标蘑菇的二维坐标(x,y)、倾斜角度α、采摘方向β,最后将这些信息传输至主控制器,上述蘑菇的位置信息可以通过主控制器让采摘模块精准地移动到待采蘑菇的上方,再根据角度的选择,使得采摘模块可以更叫有效地实现对待采蘑菇的采摘。
106.实施方式四,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,本实施方式中,对所述待采蘑菇位置信息做了进一步限定,具体包括:所述待采蘑菇位置信息包括但不限于二维坐标(x,y)、倾斜角度α和采摘方向β。
107.本实施方式中,主控制器可以根据二维坐标(x,y)的信息,将采摘模块通过移动模块移动到二维坐标(x,y)的位置上方;主控制器可以根据倾斜角度α相应地设置采摘模块的倾斜角度,如图6和图13所示,当采摘模块的倾斜角度和待采蘑菇的倾斜角度一致时,可以最有效地实现对待采蘑菇的采摘;由于双孢菇的丛生、密度较高的生长特性,选择合适的采摘方向是十分必要的,如图5所示,根据该采摘方向可以实现更高的采摘成功率、采净率。
108.实施方式五,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,具体包括:所述系统还包括气压传感器,所述气压传感器与主控制器相连,所述气压传感器串联在四位流量控制阀座与负压发生器之间,用于实时测量并显示气压。
109.本实施方式中,在四位流量控制阀座与负压发生器之间使用气压传感器,实时观测气压,便于工作人员调整相关参数,使得用于采摘蘑菇的气压维持在适当范围内,该气压既不能伤害蘑菇,又可以将蘑菇进行有效地采摘。
110.实施方式六,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,本实施方式中,对所述移动模块做了进一步限定,具体包括:所述移动模块包括电机驱动b、电机驱动c、电机驱动d、电机驱动e、继电器d、继电器e、x向电机、y向电机 1、y向电机2、z轴旋转电机和三位五通换向阀1,其中,
111.所述电机驱动b分别与主控制器和x向电机相连,用于控制x向电机实现采摘模块在x 向上的位移;
112.所述电机驱动c分别与主控制器和y向电机1相连,所述电机驱动d分别与主控制器和y向电机2相连,用于控制y向电机2实现采摘模块在y向上的位移;
113.所述电机驱动e分别与主控制器和z轴旋转电机相连,用于控制z轴旋转电机实现采摘模块围绕z轴的旋转;
114.所述继电器d分别与主控制器和三位五通换向阀1的线圈1相连,所述继电器e分别与主控制器和三位五通换向阀1的线圈2相连,用于控制采摘模块沿z轴的位移。
115.本实施方式的移动模块,可以对采摘模块进行任意方向的移动,进而完成采摘、切根、收集等相关操作,实现蘑菇采摘流程的全自动模式。
116.实施方式七,本实施方式是对实施方式一所述的一种双孢菇采摘装置控制系统的进一步限定,具体包括:所述系统还包括蘑菇培养架,所述电控回路和所述气动回路安装于所述蘑菇培养架上。
117.如图4所示,采摘模块通过移动模块连接在蘑菇培养架上,进而看可以实现全方位的自动移动。
118.实施方式八,如图15所示,本实施方式基于如上所述的一种双孢菇采摘装置控制系统,提供了一种双孢菇采摘装置控制方法,所述方法包括:
119.s1、启动双孢菇采摘装置控制系统;
120.s2、视觉模块中的摄像头获取蘑菇图像;
121.s3、通过视觉模块中的上位机对获取的蘑菇图像进行处理,选择蘑菇丛中的成熟待采蘑菇,并计算待采其二维坐标((x,y))、倾斜角度α以及采摘方向角β;
122.s4、通过视觉模块中的上位机将计算所得数据传输至主控制器;
123.s5、主控制器根据二维坐标((x,y)),通过电机驱动b、c、d控制x向电机、y向电机1 及y向电机2将采摘模块移动至待采蘑菇上方;
124.s6、主控制器通过电机驱动e控制z向旋转电机将采摘模块绕z轴旋转至采摘方向角β;
125.s7、主控制器通过电机驱动a控制采摘机电将采摘模块旋转至倾斜角度α;
126.s8、主控制器通过继电器d向三位五通换向阀1的线圈1通电,控制z向双作用气压缸带动采摘模块向下靠近待采蘑菇;
127.s9、检测拉压传感器所受压力是否达到预设值检测到压力值说明吸盘已接触到蘑菇菌盖、,若达到预设值则进入下一步,若未达到则返回s8;
128.s10、主控制器通过继电器a向二位三通换向阀的线圈1上电,使负压发生器在吸盘处产生负压,并实现吸盘对蘑菇菌盖的抓取;
129.s11、主控制器通过电机驱动a控制采摘机电将采摘模块继续旋转至最大倾斜角度γ此值为预设值,当采摘模块倾斜角度达到该值时认为蘑菇已被采下、;
130.s12、主控制器通过继电器e向三位五通换向阀1的线圈2通电,控制z向双作用气压缸带动采摘模块及已采下蘑菇向上运动,同时,主控制器通过电机驱动a控制采摘机电将采摘模块的倾斜角度复位;
131.s13、检测拉压传感器所受拉力是否达到蘑菇平均重量
±
标准差,若达到则进行下一步,若未达到,则认为采摘失败并返回s7进行二次采摘;
132.s14、主控制器通过电机驱动b、c、d控制x向电机、y向电机1及y向电机2将采摘模块及采获蘑菇移动至根切模块;
133.s15、主控制器检测根切模块的光电传感器组信号,若信号被阻断,则主控制器通过继电器b向三位五通换向阀1的线圈1通电,使根切双作用气压缸带动刀片切断蘑菇根部,随后主控制器通过继电器c向三位五通换向阀1的线圈2通电,根切双作用气压缸复位;若未检测到信号,返回s14;
134.s16、检测拉压传感器所受拉力,并记录蘑菇重量;
135.s17、主控制器通过电机驱动b、c、d控制x向电机、y向电机1及y向电机2将采摘模块及处理完毕的蘑菇移动至收集盒;
136.s18、主控制器对继电器a断电,吸盘失去对蘑菇的吸力,蘑菇在重力作用下落入收集盒;
137.s19、检测是否接收到采摘终止信号,若未接收到,返回s2,若接收到则采摘结束。
138.需要说明的是,在所述s13中,针对多次采摘失败的情况,可在主控制器中预先设定多次采摘的次数,若超过预设的采摘次数则直接跳过该蘑菇。即设置采摘的设定次数,若超过所述设定次数,则放弃对当前待采蘑菇的采摘;否则,返回s7。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1