一种单手操作的修剪机的制作方法
1.本发明涉及修剪机技术领域,特别是涉及一种单手操作的修剪机。
背景技术:
2.传统的修剪机通常需要双手操作,一手持修剪机动力部的尾端,一手持修剪机动力部的前端把手,双手进行控制,后来出现了一些可单手操作的修剪机,这种修剪机进行了竖向把手的设置以使可以单手提起,这种结构带来的问题是:使用者的手腕受力较大,结合电机的转动带来的振动,使用者的手腕容易发生疲劳,同时使用时的整体稳定性不足。
技术实现要素:
3.为解决现有技术中存在的问题,本发明提供了一种单手操作的修剪机,该单手操作的修剪机通过设置小臂固定槽使得使用者的小臂可以贴合动力部,利用弹性带将使用者的小臂与动力部绑定,使用者的手部可以抓持握把,在使用中使用者的手腕受力减小,使用者可利用小臂控制修剪机整体,不易发生疲劳,且稳定性更强。
4.为实现上述目的,本发明采用如下技术方案:
5.本发明提供了一种单手操作的修剪机,包括动力部和刀具,所述动力部的顶面开设有小臂固定槽,所述小臂固定槽的延伸方向与刀具的延伸方向平行;
6.所述小臂固定槽的一侧设置有弹性带,所述弹性带远离其与小臂固定槽的一侧连接的一端设置有魔术贴的母面,所述小臂固定槽的另外一侧设置有魔术贴的子面;
7.所述小臂固定槽靠近刀具的一端设置有握把。
8.本发明的工作原理如下:在使用前,将使用者的小臂置于小臂固定槽上,并手持握把,用另一只手拉扯弹性带,将弹性带的端部绕过使用者的小臂并利用魔术贴粘贴在小臂固定槽的侧面,以使使用者的小臂与小臂固定槽固定,通过动力部驱动刀具进行修剪时,使用者用小臂控制修剪机整体的移动。
9.本发明的单手操作的修剪机通过设置小臂固定槽使得使用者的小臂可以贴合动力部,利用弹性带将使用者的小臂与动力部绑定,使用者的手部可以抓持握把,在使用中使用者的手腕受力减小,使用者可利用小臂控制修剪机整体,不易发生疲劳,且稳定性更强。
10.在进一步的技术方案中,所述握把的端面上设置有控制开关。
11.将控制开关设置在握把的端面上,便于使用者手持握把时利用拇指操作控制开关,操作更加方便。
12.在进一步的技术方案中,所述握把的顶部朝向刀具的方向弯曲。
13.握把的顶部朝前弯曲,更加贴合使用者使用时的手掌形态,更加符合人体工程学。
14.在进一步的技术方案中,所述弹性带延小臂固定槽的延伸方向设置有多个。
15.多个弹性带使得使用者的小臂与小臂固定槽之间的绑定更加紧密。
16.在进一步的技术方案中,所述小臂固定槽的内壁设置有柔性垫层。
17.柔性垫层的设置使得使用者的小臂更加舒适,且使用者的小臂与小臂固定槽之间
贴合性更好。
18.在进一步的技术方案中,所述小臂固定槽的底面具有凸起,该凸起设置在握把远离刀具的一侧且靠近握把,所述小臂固定槽的底面从其远离刀具的一端到凸起的位置为由低到高的形状,所述小臂固定槽的底面从凸起到靠近刀具的一端为由高到低的形状。
19.将小臂固定槽的底面形状设计成与人体手臂底面形状相匹配的形状,更加符合人体工程学,使得小臂固定槽与使用者的小臂之间贴合性更好,且使用起来更加舒适。
20.有益效果在于:
21.1、本发明的单手操作的修剪机通过设置小臂固定槽使得使用者的小臂可以贴合动力部,利用弹性带将使用者的小臂与动力部绑定,使用者的手部可以抓持握把,在使用中使用者的手腕受力减小,使用者可利用小臂控制修剪机整体,不易发生疲劳,且稳定性更强。
22.2、将控制开关设置在握把的端面上,便于使用者手持握把时利用拇指操作控制开关,操作更加方便。
23.3、握把的顶部朝前弯曲,更加贴合使用者使用时的手掌形态,更加符合人体工程学。
24.4、多个弹性带使得使用者的小臂与小臂固定槽之间的绑定更加紧密。
25.5、柔性垫层的设置使得使用者的小臂更加舒适,且使用者的小臂与小臂固定槽之间贴合性更好。
26.6、将小臂固定槽的底面形状设计成与人体手臂底面形状相匹配的形状,更加符合人体工程学,使得小臂固定槽与使用者的小臂之间贴合性更好,且使用起来更加舒适。
附图说明
27.图1是本发明实施例的单手操作的修剪机的整体结构示意图;
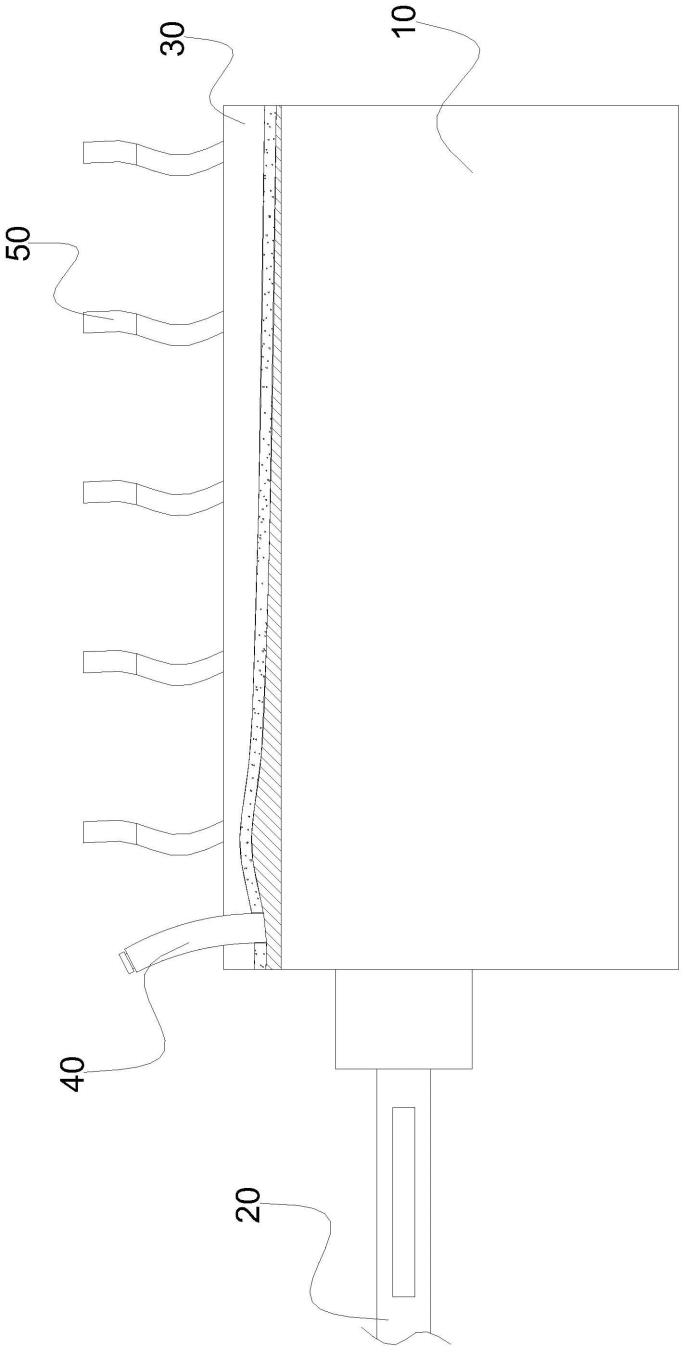
28.图2是本发明实施例的单手操作的修剪机的动力部的局部结构示意图;
29.图3是图2的右视图。
30.附图标记:
31.10、动力部;20、刀具;30、小臂固定槽;40、握把;50、弹性带。
具体实施方式
32.下面结合附图对本发明作进一步说明:
33.实施例:
34.一种单手操作的修剪机,如图1所示,包括动力部10和刀具20,如图2所示,动力部10的顶面开设有小臂固定槽30,小臂固定槽30的延伸方向与刀具20的延伸方向平行;
35.小臂固定槽30的一侧设置有弹性带50,弹性带50远离其与小臂固定槽30的一侧连接的一端设置有魔术贴的母面,小臂固定槽30的另外一侧设置有魔术贴的子面;
36.小臂固定槽30靠近刀具20的一端设置有握把40。
37.如图3所示,在本实施例中,小臂固定槽30与动力部10的外壳一体成型,且在不影响电机及传动部件的设置的前提下,小臂固定槽30在动力部10的顶面向下凹陷,小臂固定槽30的凹陷设计使得使用者的小臂的受力更加合理。
38.在本实施例中,小臂固定槽30的内壁为圆弧形。
39.本发明的工作原理如下:在使用前,将使用者的小臂置于小臂固定槽30上,并手持握把40,用另一只手拉扯弹性带50,将弹性带50的端部绕过使用者的小臂并利用魔术贴粘贴在小臂固定槽30的侧面,以使使用者的小臂与小臂固定槽30固定,通过动力部10驱动刀具20进行修剪时,使用者用小臂控制修剪机整体的移动。
40.本发明的单手操作的修剪机通过设置小臂固定槽30使得使用者的小臂可以贴合动力部10,利用弹性带50将使用者的小臂与动力部10绑定,使用者的手部可以抓持握把40,在使用中使用者的手腕受力减小,使用者可利用小臂控制修剪机整体,不易发生疲劳,且稳定性更强。
41.在另外一个实施例中,如图2所示,握把40的端面上设置有控制开关。
42.将控制开关设置在握把40的端面上,便于使用者手持握把40时利用拇指操作控制开关,操作更加方便。
43.在另外一个实施例中,如图2所示,握把40的顶部朝向刀具20的方向弯曲。
44.握把40的顶部朝前弯曲,更加贴合使用者使用时的手掌形态,更加符合人体工程学。
45.在另外一个实施例中,如图2所示,弹性带50延小臂固定槽30的延伸方向设置有多个。
46.多个弹性带50使得使用者的小臂与小臂固定槽30之间的绑定更加紧密。
47.在另外一个实施例中,如图2和图3所示,小臂固定槽30的内壁设置有柔性垫层。
48.柔性垫层的设置使得使用者的小臂更加舒适,且使用者的小臂与小臂固定槽30之间贴合性更好。
49.在另外一个实施例中,如图2所示,小臂固定槽30的底面具有凸起,该凸起设置在握把40远离刀具20的一侧且靠近握把40,小臂固定槽30的底面从其远离刀具20的一端到凸起的位置为由低到高的形状,小臂固定槽30的底面从凸起到靠近刀具20的一端为由高到低的形状。
50.使用者在使用时,肘关节弯曲90度,即使用者的大臂倾向于竖直方向,而使用者的小臂倾向于平放,此时刀具20也倾向于平放,而小臂的形状是从肘关节到腕关节逐渐由粗到细,因此小臂固定槽30的底面对应这部分的形状为由低到高,小臂固定槽30的底面的凸起对应使用者手腕的位置,因此,小臂固定槽30的底面可以与使用者的手臂整体贴合。
51.将小臂固定槽30的底面形状设计成与人体手臂底面形状相匹配的形状,更加符合人体工程学,使得小臂固定槽30与使用者的小臂之间贴合性更好,且使用起来更加舒适。
52.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1