矿山生态修复系统
1.本发明涉及绿化设备技术领域,更具体地涉及矿山生态修复系统。
背景技术:
2.矿山经过挖掘后,地表形成了类似大型岩坑等,会损伤地表,导致生态失衡。常见的矿山表面修复,一般是采用喷灌机,喷灌机就是用于喷洒灌溉水的机器设备,同时也可以喷灌生物种子以及所需的营养物质,从而实现矿山生态的快速修复。
3.但是传统的修复装置在进行工作的时候,长途运输的过程中需要用到滚轮来对其进行运输,就会增加装置的整体高度,但是传统设备没有设置延伸的扶梯,就会增加人员的上机难度,同时装置的工作需要人员站在枪头的附近,长时间工作会使人员赶到疲惫,不够人性化,当然也不够智能化。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明提供了矿山生态修复系统,以解决上述背景技术中存在的问题。
5.本发明提供如下技术方案:矿山生态修复系统,包括动力箱,所述动力箱的顶端与活动偏移装置的底端固定连接,所述活动偏移装置包括喷射组件,所述动力箱的顶端与喷射组件的底端固定连接,所述喷射组件的侧边与底座的中心部位固定连接,所述底座的顶端开设有环槽,且环槽的内部与滚珠的一端活动连接,所述滚珠的顶端与盖板的底端活动连接,所述盖板的顶端与座椅的底端固定连接,所述动力箱的侧边与延伸扶梯装置的侧边固定连接,所述延伸扶梯装置包括主板,通过活动偏移装置结构可以使装置的喷射角度和人员身体一起旋转。
6.进一步的,所述动力箱的侧边与主板的侧边固定连接,所述主板的侧边与扶手的两端固定连接,所述扶手的外沿与套环的内部固定连接,所述套环的侧边与套件的一端固定连接,所述主板的侧边开设有长槽,且长槽的内部与引导轴的外沿活动套接,所述引导轴的一端与延伸板的侧边固定连接,通过延伸扶梯装置结构可以使装置可以实现扶梯高度调节。
7.进一步的,所述动力箱的顶端与护栏的底端固定连接,所述动力箱的侧边与存储罐的侧边固定连接,利用存储罐可对营养液和生物种子进行运输。
8.进一步的,所述动力箱的内部设有动力装置,所述存储罐的侧边开设有导管与活动偏移装置的底端连接,可以将存储罐内部的物质通过导管传输到活动偏移装置的内部。
9.进一步的,所述喷射组件的侧边开设有控制器,且喷射组件的内部分为枪头和枪身,且枪头和枪身之间可以旋转,实现多角度进行喷射。
10.进一步的,所述延伸板的内部设有横杆,且套件的一端为弯形结构,弯形结构的一端与延伸板的外沿相互套接。
11.进一步的,还包括上位机,所述存储罐的顶部设置调压阀,所述的存储罐内设置小
存储容量区、中存储容量区和大存储容量区,所述的小存储容量区、中存储容量区和大存储容量区均联通一个总联通管路,所述的总联通管路通过连接软管与电泵机联通,所述的电泵机用于联通喷射组件,所述的喷射组件上设置电泵机的控制开关,所述的电泵机与控制电路板电连接,所述的控制电路板与上位机电连接,所述的小存储容量区与总联通管路联通壁设置两个电磁阀,所述的中存储容量区与总联通管路联通壁设置六个电磁阀,所述的大存储容量区与总联通管路联通壁设置九个电磁阀,每一个电磁阀均与控制电路板电连接,所述的控制电路板用于从上位机获取周期控制信号并且按照周期控制信号加载到电泵机上控制流速,并且按照周期控制信号加载到不同的电磁阀上调整喷射液成分和密度;所述的控制电路板上还设置定位电路,所述的上位机用于从控制电路板的定位电路中获取控制电路板当前的位置信号,并且所述的上位机基于控制电路板当前的位置信号对应计算相应的周期控制信号。
12.进一步的,还包括在矿山分布式设置的采集传感器,所述的采集传感器与上位机电连接,所述的采集传感器用于采集矿山的土壤信息并且将其位置id信号、采集时间信号、土壤信息信号一起打包发送给上位机,所述的上位机根据不同的采集传感器的位置id信号、采集时间信号、土壤信息信号确定不同区域的植被情况进而计算不同区域相应的喷射液成分和密度,所述的上位机基于“所计算不同区域相应的喷射液成分和密度”信息向具有位置信号的控制电路板返回“对应计算相应的周期控制信号”。
13.进一步的,还包括无人机,所述的无人机用于在矿山上各个区域进行图像采集,然后交付给上位机完成图像识别和分析,上位机通过图像识别能够确定不同区域的植被覆盖,然后根据不同区域的植被覆盖的具体情况再进行调整喷射的溶液。
14.本发明的技术效果和优点:
15.本发明通过活动偏移装置,通过人员将套件的一端与延伸板的内部分开,然后由于重力的作用,延伸板会向下移动,同时由于引导轴的存在,对延伸板的方向进行引导,然后使延伸扶梯装置的整体长度拉长,从而当动力箱的高度变高时,依然可以实现人员轻松上机,方便了人员操作,使装置的使用更具有灵活性。本发明通过设有活动偏移装置,人员坐在座椅的上端,然后利用腿部力量,使座椅带动盖板进行旋转,同时人员调整喷射组件的前供图方向,然后利用滚珠在盖板与底座之间滑动,从而可以将座椅的方向进行改变,从而使操作更加轻松,同时可以更方便人员,避免了人员长时间操作劳累。优选地,本发明分布式的采集传感器,用于采集矿山中各个地区的营养数据,另外,采集完之后将营养数据反馈给上位机,上位机对应的计算需要喷洒的优选的实施方案,然后由喷射组件进行实时地喷射。本发明专门用于图像采集的无人机,无人机专门用于在矿山各个区域进行图像采集,然后交付给上位机进行图像识别,上位机通过图像识别能够确定不同区域的植被覆盖,然后根据不同区域的植被覆盖的具体情况再进行调整喷射的溶液,并且在控制喷射组件进行相应的反馈调整。
附图说明
16.图1为本发明的整体结构示意图。
17.图2为本发明的活动偏移装置整体结构图。
18.图3为本发明的延伸扶梯装置整体结构图。
19.图4为本发明的存储罐结构示意图。
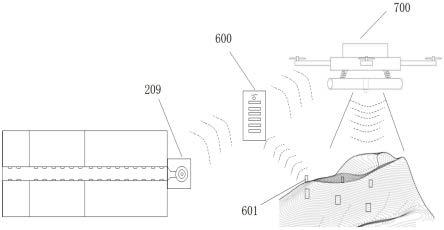
20.图5为本发明一种优选实施例的整体组成示意图。
具体实施方式
21.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,另外,在以下的实施方式中记载的各结构的形态只不过是例示,本发明所涉及的化工安全用高压管道监控设备并不限定于在以下的实施方式中记载的各结构,在本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施方式都属于本发明保护的范围。
22.参照图1和图2,本发明提供了矿山生态修复系统,包括动力箱1,动力箱1的顶端与活动偏移装置4的底端固定连接,活动偏移装置4包括喷射组件401,动力箱1的顶端与喷射组件401的底端固定连接,喷射组件401的侧边与底座402的中心部位固定连接,底座402的顶端开设有环槽,且环槽的内部与滚珠403的一端活动连接,滚珠403的顶端与盖板404的底端活动连接,盖板404的顶端与座椅405的底端固定连接,动力箱1的侧边与延伸扶梯装置5的侧边固定连接,延伸扶梯装置5包括主板501,通过活动偏移装置4结构可以使装置的喷射角度和人员身体一起旋转。
23.参照图3和图4,动力箱1的侧边与主板501的侧边固定连接,主板501的侧边与扶手502的两端固定连接,扶手502的外沿与套环503的内部固定连接,套环503的侧边与套件504的一端固定连接,主板501的侧边开设有长槽,且长槽的内部与引导轴505的外沿活动套接,引导轴505的一端与延伸板506的侧边固定连接,通过延伸扶梯装置5结构可以使装置可以实现扶梯高度调节。
24.参照图1,动力箱1的顶端与护栏3的底端固定连接,动力箱1的侧边与存储罐2的侧边固定连接,利用存储罐2可对营养液和生物种子进行运输。
25.参照图1,动力箱1的内部设有动力装置,存储罐2的侧边开设有导管与活动偏移装置4的底端连接,可以将存储罐2内部的物质通过导管传输到活动偏移装置4的内部。
26.参照图2,喷射组件401的侧边开设有控制器,且喷射组件401的内部分为枪头和枪身,且枪头和枪身之间可以旋转,实现多角度进行喷射。
27.参照图3和图4,延伸板506的内部设有横杆,且套件504的一端为弯形结构,弯形结构的一端与延伸板506的外沿相互套接。
28.本发明的工作原理:通过人员将套件504的一端与延伸板506的内部分开,然后由于重力的作用,延伸板506会向下移动,同时由于引导轴505的存在,对延伸板506的方向进行引导,然后使延伸扶梯装置5的整体长度拉长,从而当动力箱1的高度变高时,依然可以实现人员轻松上机,人员坐在座椅405的上端,然后利用腿部力量,使座椅405带动盖板404进行旋转,同时人员调整喷射组件401的前供图方向,然后利用滚珠403在盖板404与底座402之间滑动,从而可以将座椅405的方向进行改变,从而使操作更加轻松。
29.优选地实施中,本发明还包括上位机600,所述存储罐201的顶部设置调压阀,所述的存储罐201内设置小存储容量区202、中存储容量区203和大存储容量区204,所述的小存储容量区202、中存储容量区203和大存储容量区204均联通一个总联通管路205,所述的总联通管路205通过连接软管207与电泵机208联通,所述的电泵机208用于联通喷射组件401,所述的喷射组件401上设置电泵机208的控制开关,所述的电泵机208与控制电路板209电连
接,所述的控制电路板209与上位机600电连接,所述的小存储容量区202与总联通管路205联通壁设置两个电磁阀206,所述的中存储容量区203与总联通管路205联通壁设置六个电磁阀206,所述的大存储容量区204与总联通管路205联通壁设置九个电磁阀206,每一个电磁阀206均与控制电路板209电连接,所述的控制电路板209用于从上位机600获取周期控制信号并且按照周期控制信号加载到电泵机208上控制流速,并且按照周期控制信号加载到不同的电磁阀206上调整喷射液成分和密度;所述的控制电路板209上还设置定位电路,所述的上位机600用于从控制电路板209的定位电路中获取控制电路板209当前的位置信号,并且所述的上位机600基于控制电路板209当前的位置信号对应计算相应的周期控制信号。
30.优选地实施中,本发明还包括在矿山分布式设置的采集传感器601,所述的采集传感器601与上位机600电连接,所述的采集传感器601用于采集矿山的土壤信息并且将其位置id信号、采集时间信号、土壤信息信号一起打包发送给上位机600,所述的上位机600根据不同的采集传感器601的位置id信号、采集时间信号、土壤信息信号确定不同区域的植被情况进而计算不同区域相应的喷射液成分和密度,所述的上位机600基于“所计算不同区域相应的喷射液成分和密度”信息向具有位置信号的控制电路板209返回“对应计算相应的周期控制信号”。
31.优选地实施中,本发明还包括无人机700,所述的无人机700用于在矿山上各个区域进行图像采集,然后交付给上位机600完成图像识别和分析,上位机600通过图像识别能够确定不同区域的植被覆盖,然后根据不同区域的植被覆盖的具体情况再进行调整喷射的溶液。
32.本发明分布式的采集传感器,用于采集矿山中各个地区的营养数据,另外,采集完之后将营养数据反馈给上位机,上位机对应的计算需要喷洒的优选的实施方案,然后由喷射组件进行实时地喷射。本发明专门用于图像采集的无人机,无人机专门用于在矿山各个区域进行图像采集,然后交付给上位机进行图像识别,上位机通过图像识别能够确定不同区域的植被覆盖,然后根据不同区域的植被覆盖的具体情况再进行调整喷射的溶液,并且在控制喷射组件进行相应的反馈调整。
33.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1