一种全自动植树机器人
1.本发明涉及生态修复及园林绿化设备技术领域,特别涉及一种全自动植树机器人。
背景技术:
2.目前种植方式仍以人工种植为主,效率较低;尤其在条件恶劣的荒漠地区,造成大量人力,物力的耗费。为了提高种植效率,降低人力成本,机器种植成为首选思路。多年来国内外在该领域不断更新发展,已经逐步在许多领域实现了机器种植。
3.然而,现有的种植机器存在体积庞大,功能单一,自动化程度偏低,操作时需要多人辅助作业的不足。而一些高精度自动化设备,如多自由度机械手等价格偏高,易损坏难修理,不适于在荒漠环境下工作。以上问题都一定程度上限制了沙漠植树机的推广应用。
技术实现要素:
4.本发明目的是为了解决上述问题而提供了一种全自动植树机器人;一种全自动植树机器人,它包括:车架1、行走履带2、太阳能光伏组件3、钻坑机构4、树苗投放机构5、扶正机构6、灌溉机构7、覆土机构8、行走控制单元;所述的车架1包括:底板11、水平行走装置13,行走履带2设有4组,4组行走履带2分别设在底板11四边角的下方;太阳能光伏组件3与树苗投放机构5设在底板11首尾两侧;水平行走装置13设在树苗投放机构5下;水平行走装置13包括:导轨131、丝杠132、第一丝母、第二丝母、丝杠驱动电机134、丝杠副支架;导轨131和丝杠132水平轴接在丝杠副支架上;丝杠副支架固定在连接在底板11上面的后部;第一丝母、第二丝母均套接在丝杠上;第一丝母与第二丝母间距为导轨131行程的一半;丝杠驱动电机134输出轴与丝杠132连接;丝杠132通过丝杠驱动电机134驱动旋转;钻坑机构4接在第一丝母上;扶正机构6接在第二丝母上;丝杠驱动电机134驱动钻坑机构4与扶正机构6在水平行走装置13横向移动;覆土机构8设在钻坑机构4下方;灌溉机构7设在车架1腹部。
5.所述的4组行走履带2结构相同;行走履带2包括:支撑板21、主动轮22、从动轮23、履带24、行走驱动电机25、平衡轮26;主动轮22和从动轮23设在支撑板21外侧,履带24套接在主动轮22和从动轮23上;行走驱动电机25和平衡轮26设在支撑板21内侧;主动轮22与行走驱动电机25输出轴连接。
6.所述的太阳能光伏组件3包括:光伏板31、光伏板支架32、第一舵机33、第一转盘34、第二转盘35、第一内齿轮36、第一外齿轮37、太阳能跟踪器、电池39;光伏板支架32上设有撑托面,撑托面与水平面呈40度,光伏板31固定在光伏板支架32的撑托面上;第一转盘34设在底板11一侧端部;第二转盘35设在第一转盘34中,并且第二转盘35可在第一转盘34中旋转;第一外齿轮37设在第二转盘35上;第一内齿轮36与第一舵机33输出轴连接;第一内齿轮36与第一外齿轮37啮合;太阳能跟踪器设在光伏板31下方;电池39固定安装在第一转盘34内的底板11上。
7.所述钻坑机构4包括:第一推杆41、第二电机42、钻头43、角码44、第一滑块45;钻头43与第二电机42输出轴相连接;第二电机42与角码44连接;角码44另一面与第一推杆41端部连接;第一推杆41竖直固定连接在第一滑块45上;第一滑块45上设有丝母,第一滑块45通过丝母与导轨131连接;丝杠驱动电机134驱动第一推杆41在导轨131上滑动。
8.所述树苗投放机构5包括:第三转盘51,第四转盘52、树苗存储筒53、投放导筒54、第二舵机55、第二内齿轮56、第二外齿轮57、投放孔58、支撑块59;第三转盘51内设有第二外齿轮57;第三转盘51一侧设有投放导筒54 ;钻头43中心轴可与投放导筒54中心轴重合;第四转盘52上设有多个树苗存储筒53;树苗存储筒53下方为投放孔58;第四转盘52旋转后,投放孔58可与投放导筒54重合;第三转盘51固定在底板11上;第四转盘52设在第三转盘51中,并且第四转盘52可在第三转盘51内旋转;第三转盘51的圆环形内侧设有第二内齿轮56;第二内齿轮56与安装在第四转盘52内部的第二外齿轮57互相啮合;第二内齿轮56与第二舵机55的输出轴连接;第二舵机55通过支撑块59固定在底板11上。
9.所述扶正机构6包括:扶正抓手61、连接架62、第二滑块63、抓手机架64、第三舵机65;扶正抓手61通过连接架62固定在第二滑块63上;第二滑块63通过第二丝母与导轨131连接;抓手机架64固定在连接架62端部;所述的扶正抓手61设有2组,2组扶正抓手61结构对称布置在抓手机架64上;第三舵机65固定安装在抓手机架64上;扶正抓手61中的从动臂爪613通过第三舵机65实现机械抓握。
10.所述灌溉机构7包括:储水箱71、输水管72、水泵73;储水箱71为长方体位于底板11下方,其顶部平面与底板11下面相固定;输水管72通过水泵73与储水箱71输水口连接。
11.所述覆土机构8包括: 覆土板81、第二推杆82、连接块83;覆土板81为半圆筒形,第二推杆82一端与覆土板81外弧面连接;第二推杆82另一端固定在连接块83上;即覆土板81通过第二推杆82与连接块83连接;覆土机构8设有2组,2组覆土机构8对设在钻坑机构4下方,2组连接块83与底板11固定连接;第二推杆82驱动两个覆土板81可对接呈覆土包柱,覆土包柱的轴心线与投放导筒54的中心轴重合。
12.所述行走控制单元包括:摄像头91、控制模块92;摄像头91与控制模块92设在第一转盘34下方;控制模块中设有北斗定位、esp32-cam;摄像头91与控制模块92协同工作;用户端通过手机app端或终端电脑通过esp32-cam访问摄像头91并获取设备位置信息。
13.本发明提供了一种全自动植树机器人,它包括:车架1、行走履带2、太阳能光伏组件3、钻坑机构4、树苗投放机构5、扶正机构6、灌溉机构7、覆土机构8、行走控制单元;车架1包括:底板11、水平行走装置13;行走履带2设有4组,4组行走履带2分别设在底板11四边角的下方;太阳能光伏组件3与树苗投放机构5设在底板11首尾两侧;水平行走装置13设在树苗投放机构5下;水平行走装置13为丝杠运动副;钻坑机构4与扶正机构6通过水平行走装置13横向移动;覆土机构8设在钻坑机构4下方;灌溉机构7设在车架1腹部。本发明为沙漠环境特定的可变速钻头,可根据不同地质状况对钻头转速进行调节;并将钻坑、种苗、扶正、浇水、覆土、压实集中于一台设备,大大减少人工操控的需要,节省劳动力;还能远程操控,实现无人种植、黑夜种植,提高工作效率。
14.本发明的有益效果(1)本发明将钻坑、种苗、扶正、浇水、覆土、压实整套植树工作流程集中于一台设
备,大大减少人工操控的需要,节省劳动力。
15.(2)本发明提供的环形树苗存储盘集合存储和投放于一体,空间利用率更高,且结构简单,便于安装拆卸。
16.(3)本发明提供的为沙漠环境特定的可变速钻头,可根据不同地质状况对钻头转速进行调节,能够有效提高钻坑效果。
17.(4)本发明附带太阳能充电板,利用沙漠地区较丰富的太阳能资源辅助驱动,延长作业时间,绿色环保。
18.(5)本发明引入北斗与gps双定位导航系统,并且在位于车身前方的数控单元搭载摄像头、温湿度传感器等模块,可以对设备所处环境、地理位置与种植情况进行实时监控。
19.(6)本发明配有完整的移动终端操控系统,能够在手机app上实时操控,自动/手动控制模式一键切换,实时反馈环境信息、视频画面、树苗余量及电池电量等。可在规划种植路线后自动作业,实现无人种植、黑夜种植,提高工作效率。
附图说明
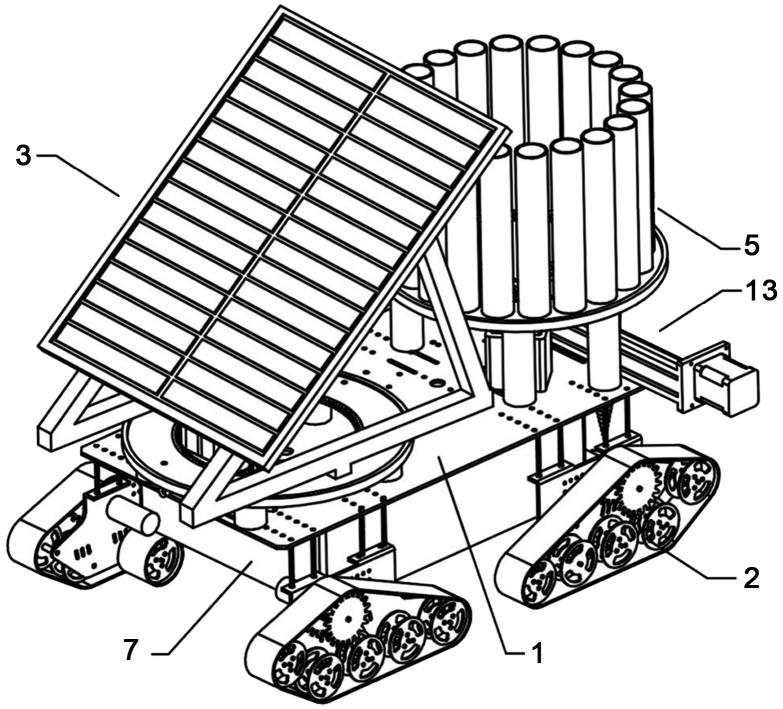
20.图1是本发明一种全自动植树机器人的整体示意图;图2是本发明一种全自动植树机器人的结构仰视示意图;图3至图5是本发明一种全自动植树机器人的底座结构示意图;图6是本发明一种全自动植树机器人的光伏板支架结构示意图;图7、8为本发明一种全自动植树机器人行走履带结构示意图图9为本发明一种全自动植树机器人的钻坑机构的结构示意图;图10、11、12为本发明一种全自动植树机器人的树苗投放机构结构示意图;图13为本发明一种全自动植树机器人扶正机构结构示意图;图14为本发明一种全自动植树机器人的灌溉机构结构示意图;图15为本发明一种全自动植树机器人的覆土机构结构示意图;图中:车架1,行走履带2,钻坑机构4,树苗投放机构5,扶正机构6,灌溉机构7,覆土机构8,底板11,支撑柱12,光伏板31,光伏板支架32,第一舵机33,第一转盘34,第二转盘35,第一内齿轮36,第一外齿轮37,第一连接杆341,水平行走装置13,导轨131,丝杠132,丝杠驱动电机134,电池39,支撑板21,主动轮22,从动轮23,履带24,行走驱动电机25,平衡轮26,第一推杆41,第二电机42,钻头43,角码44,第一滑块45,第三转盘51,第四转盘52,树苗存储筒53,投放导筒54,第二连接杆511,第二舵机55,第二内齿轮56,第二外齿轮57,投放孔58,支撑块59,扶正抓手61、连接架62、第二滑块63,第三舵机65,主动臂611,从动臂爪613,抓手机架506,储水箱71,输水管72,水泵73, 覆土板81,第二推杆82,连接块83,摄像头91,控制模块92。
具体实施方式
21.实施例1参见图1至图15所示,一种全自动植树机器人,它包括:车架1、行走履带2、太阳能光伏组件3、钻坑机构4、树苗投放机构5、扶正机构6、灌溉机构7、覆土机构8、行走控制单元;所述的车架1为一个长方形框架,其包括:底板11、支撑柱12、水平行走装置13;支
撑柱12设在车架1四边角下方;行走履带2设有4组,4组行走履带2分别与车架1四边角下方的支撑柱12连接;太阳能光伏组件3与树苗投放机构5设在底板11首尾两侧;水平行走装置13设在树苗投放机构5下;钻坑机构4与扶正机构6设在水平行走装置13上,并通过水平行走装置13横向移动;覆土机构8设在钻坑机构4下方;灌溉机构7设在车架1腹部;所述的水平行走装置13为丝杠运动副,水平行走装置13包括:导轨131、丝杠132、丝母、丝杠驱动电机134、丝杠副支架;导轨131和丝杠132水平轴接在丝杠副支架上;丝杠副支架固定在连接在底板11上面的后部;第一丝母、第二丝母均套接在丝杠上;第一丝母与第二丝母间距为导轨131行程的一半;丝杠驱动电机134输出轴与丝杠132连接;丝杠132通过丝杠驱动电机134驱动旋转。
22.所述的行走履带2包括:支撑板21、主动轮22、从动轮23、履带24、行走驱动电机25、平衡轮26;所述的主动轮22轴接在支撑板21外侧上部,从动轮23设有5个,其中4个从动轮23水平分布在支撑板21外侧底部,其中1个从动轮23设在支撑板21一侧;行走驱动电机25固定在支撑板21另一侧;主动轮22与行走驱动电机25输出轴连接;履带24套接在主动轮22和从动轮外;平衡轮26设在支撑板21内侧;所述的车架1上设有4组行走履带2,4组行走履带2上的平衡轮26相对布置;平衡轮26将车架1作业时的重力作用线移至行走履带的中间,使行走履带的受力结构更合理。
23.所述的太阳能光伏组件3包括:光伏板31、光伏板支架32、第一舵机33、第一转盘34、第二转盘35、第一内齿轮36、第一外齿轮37、太阳能跟踪器、电池39;所述的光伏板支架32由两个三角支撑架组成,光伏板支架32上设有撑托面,撑托面与水平面呈40度,光伏板31固定在光伏板支架32的撑托面上;所述的第一转盘34下方设有第一连接杆341,第一转盘34通过第一连接杆341与底板11一侧端部固定连接;第一转盘34外边沿设有挡板;第二转盘35安装在第一转盘34上的挡板内;第二转盘35可在第一转盘34中旋转;第一外齿轮37设在第二转盘35上;第一内齿轮36与第一舵机33输出轴连接;第一内齿轮36与第一外齿轮37啮合;所述的太阳能跟踪器设在光伏板31下方;太阳能跟踪器为是用来跟踪太阳,使集能器的主光轴始终与太阳光线相平行的装置;太阳能跟踪器与第一舵机33电气连接,第一舵机33调整第二转盘35旋转角度,使光伏板31照射角度使其正对于太阳,提高光伏转换利用率;所述电池39固定安装在第一转盘34内的底板11上。
24.所述钻坑机构4包括:第一推杆41、第二电机42、钻头43、角码44、第一滑块45;所述钻头43与第二电机42输出轴相连接;第二电机42与角码44连接;角码44另一面与第一推杆41端部连接;所述的第一滑块45固定在第一丝母上,第一滑块45设在导轨131上,丝杠驱动电机134驱动第一滑块45在导轨131上滑动;第一推杆41竖直固定连接在第一滑块45上;即钻头43垂直朝下,并可在水平行走装置13上滑动;所述的钻头43为钴钨钢材质,钻头43整体为圆锥形,其上带有螺旋纹路与排沙槽;钻坑时不易造成坍塌,钻头43的高速旋转下便于将沙土甩出,降低回填率。
25.所述树苗投放机构5包括:第三转盘51,第四转盘52、树苗存储筒53、投放导筒54、
第二舵机55、第二内齿轮56、第二外齿轮57、投放孔58、支撑块59;所述的第三转盘51为圆环形,第三转盘51内设有第二外齿轮57;第三转盘51一侧设有投放导筒54 ;钻头43中心轴可与投放导筒54中心轴重合;所述的第四转盘52上设有多个投放孔58;投放孔58上均设有树苗存储筒53;所述的树苗存储筒53、投放孔58和投放孔58孔径大小均相同;所述的第三转盘51下方设有第二连接杆511,第三转盘51通过第二连接杆511固定在底板11上;第三转盘51外沿设有挡板;第四转盘52设在第三转盘51的挡板内;第四转盘52可在第三转盘51内旋转;第三转盘51的圆环形内侧设有第二内齿轮56;第二内齿轮56与安装在第四转盘52内部的第二外齿轮57互相啮合;第二内齿轮56与第二舵机55的输出轴连接;第二舵机55固定安装在支撑块59上;支撑块59固定在底板11上。
26.所述扶正机构6设有2组,2组扶正机构6结构对称设在树苗投放机构5下方;所述扶正机构6包括:扶正抓手61、连接架62、第二滑块63、抓手机架64、第三舵机65;扶正抓手61通过连接架62固定在第二滑块63上;抓手机架64固定在连接架62端部;所述的扶正抓手61设有2组,2组扶正抓手61结构对称布置在抓手机架64上;所述的扶正抓手61包括:主动臂611、副主动臂杆612、从动臂爪613;主动臂611端部设有铰接轴,铰接轴接在抓手机架64上;主动臂611上设有同步啮合轮齿;同步啮合轮齿与铰接轴轴心重合;副主动臂杆612的一侧端部轴接在抓手机架64上,从动臂爪613分别与主动臂611、副主动臂杆612连接;主动臂611、副主动臂杆612、从动臂爪613和抓手机架64组成四连杆运动副;所述第三舵机65固定安装在抓手机架64上;第三舵机65的输出轴与其中一个主动臂611的同步啮合轮齿连接;第三舵机65驱动2个主动臂611同步啮合;所述抓手机架64水平连接在竖直连接于第二滑块63的连接架62上;所述的第二滑块63与第一滑块45相隔距离,大于钻头43直径。
27.所述灌溉机构7包括:储水箱71、输水管72、水泵73;储水箱71为长方体位于底板11下方,其顶部平面与底板11下面相固定;输水管72通过水泵73与储水箱71输水口连接。
28.所述覆土机构8包括: 覆土板81、第二推杆82、连接块83;覆土板81为半圆筒形,第二推杆82一端与覆土板81外弧面连接;第二推杆82另一端固定在连接块83上;即覆土板81通过第二推杆82与连接块83连接;所述的覆土机构8设有2组,2组覆土机构8对设在钻坑机构4下方,2组连接块83与底板11固定连接;第二推杆82驱动两个覆土板81可对接呈覆土包柱,覆土包柱的轴心线与投放导筒54的中心轴重合;覆土机构8在实现覆土的同时完成压实动作;增大覆土范围;行走控制单元包括:摄像头91、控制模块92;摄像头91与控制模块92设在第一转盘34下方;控制模块中设有北斗定位、esp32-cam;摄像头91与控制模块92协同工作;用户端通过手机app端或终端电脑通过esp32-cam访问摄像头91并获取设备位置信息。
29.本发明工作原理:本发明在使用时:1)首先将树苗放入树苗存储筒53中,然后在手机app端规划路径和植树方案;2)根据当地太阳照射角度调整第一舵机33,第一舵机33带动第二转盘35及光伏板
31正对于太阳;3)行走履带2中的第一电机25带动主动轮22,主动轮22带动履带24,履带24带动从动轮23及平衡轮26,使设备行走到达预定植树位置;4)水平行走装置13通过第一滑块45将钻头43移至待植树位置上方,并与投放导筒54中心轴重合;第二滑块63与第一滑块45同步同方向移动,第二滑块63将扶正抓手61从投放导筒54正下方横向移出;第二电机42带动钻头43转动,第一推杆41向下运动带动钻头43向下移动完成钻坑,钻坑完毕后,第一推杆41向上运动带动钻头43恢复至初始位置;5)水平行走装置13带动第二滑块63移动使扶正抓手61正对于钻坑上方,同时第一滑块45带动钻头43从钻坑上方横向移出;第二舵机55带动第四转盘52及树苗存储筒53转动一定角度使下一位置装有树苗的树苗存储筒53正对于投放导筒54,然后树苗通过投放导筒54落入坑中,第三舵机65带动主动臂611,主动臂611带动从动臂爪613运动实现扶正抓手61夹紧,树苗中部被固定和扶正;6)树苗扶正后,开启水泵73,通过输水管72输送适量水至树苗底部,两个第二推杆82伸出,将端部覆土板81向树苗位置靠拢进行覆土压实后缩回至原位置,第三舵机65带动主动臂611,主动臂611带动从动臂爪613运动实现扶正抓手61松开,然后水平行走装置13带动第二滑块63移动扶正抓手61,使树苗处于钻头43和扶正抓手61之间的空当;7)行走履带2中的第一电机25带动主动轮22,主动轮22带动履带24,履带24带动从动轮23使设备行走到达下一预定植树位置,重复上述操作;最终根据规划方案完成全部植树工作后,设备自动返回出发点,并向手机app发送反馈。
30.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1