一种基于机器学习的非圆种子种芽定向机构
1.本发明涉及农业机械技术领域,具体说是一种基于机器学习的非圆种子种芽定向机构。
背景技术:
2.中国十分注重粮食安全。提高粮食生产效率,能够有效保障粮食安全。相关研究表明,种芽朝向对于部分作物的生长发育有重要影响,此类作物在播种时有严格的农艺要求,播种时需要大量人力物力,并且效率低下。
3.虽然我国的农业机械化快速发展,但是在种芽朝向调整机构方面的研究较少。已有的方案中,例如,高迟等学者的大蒜鳞芽方向识别的实验研究,崔志超等学者的大蒜栽植器的研制,哈克农装研制的鳞芽向上大蒜播种机等,大多利用种子本身的外形尺寸、摩擦特性、重心位置以及浮力等物理特性,通过机械机构对种芽朝向进行调整,虽然此类机械机构对于某一品种作物有较好的效果,但是对于同一作物的不同品种,其外形尺寸改变,效果将有所下降。例如,大蒜的不同品种,外形相差较大,有些大蒜品种外形较为扁长,有些大蒜品种较为浑圆。且对于形状不同的作物需要设计专用的特殊方案,设计成本较高。综上,当前已有的研究通用性不强,无法便捷地用于不同的作物。
4.公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现要素:
5.针对现有技术中存在的缺陷,本发明的目的在于提供一种基于机器学习的非圆种子种芽定向机构,所述定向机构通过机器学习对非圆种子种芽的朝向进行识别,再通过机械结构对非圆种子种芽的朝向进行调整,提高了定向机构的通用性,可准确、高效的对非圆种子种芽的朝向进行调整,所述定向机构可在播种或者育种阶段使用,满足农艺要求,提高播种效率,减轻劳动强度,提高产量。
6.为达到以上目的,本发明采取的技术方案是:
7.一种基于机器学习的非圆种子种芽定向机构,其特征在于,包括:
8.平台4,在其下方设有电机6,在其上方设有转盘3,电机6驱动转盘3在平台4表面转动;
9.平台4上设有落种区域1001,在落种区域1001两侧各设有一个落种孔;
10.转盘3设有拨种臂,所述拨种臂用于将落种区域1001内的非圆种子扫落到一侧的落种孔内;
11.摄像头2,设于转盘3的上方,正对落种区域1001的位置,用于采集落于此处的非圆种子的图像;
12.导种管5,用于对非圆种子进行种芽定向,整体呈y字形,其上部为两个分支导种管,下部为总导种管,所述分支导种管的上端设有种子入口,所述总导种管的下端设有种子
出口,两个种子入口分别与一个落种孔连通,分支导种管的下端均与总导种管连通。
13.在上述技术方案的基础上,还包括控制器8;
14.控制器8和摄像头2之间通过导线连接,用于获取并处理摄像头 2采集的非圆种子的图像数据;
15.控制器8和电机6之间通过导线连接,用于控制电机6的转动速度、转动方向及转动角度。
16.在上述技术方案的基础上,控制器8通过机器学习对非圆种子种芽的朝向进行识别,再控制电机6转动,使非圆种子落入一侧的落种孔内。
17.在上述技术方案的基础上,平台4下方还设有底座7,控制器8 和电机6均设置在底座7上。
18.在上述技术方案的基础上,摄像头2可拆装的设置在摄像头支架 1上,摄像头支架1设置在底座7上。
19.在上述技术方案的基础上,导种管5上设有安装支架,安装支架与底座7固定连接。
20.在上述技术方案的基础上,转盘3设有若干拨种臂,相邻拨种臂之间的间距与落种区域1001的尺寸适配;
21.所述落种区域1001用于容纳一粒非圆种子;
22.落种孔为椭圆形孔;
23.拨种臂的自由端设有y形分叉,y形分叉向相邻的拨种臂方向延伸,对间隙中的非圆种子起到阻拦的作用。
24.在上述技术方案的基础上,所述控制器8通过机器学习对非圆种子种芽的朝向进行识别,具体步骤如下:
25.训练机器学习模型阶段:让种子进入落种区域1001,采集种子的图像数据;采集范围1101大于落种区域1001;
26.采集大量图像数据后,将采集到的图像以种芽作为“头”部,分类为种子“头”朝里和“头”朝外两种类型,形成训练集;
27.使用训练集训练机器学习模型;
28.使用机器学习模型阶段:完成训练后,让种子进入落种区域1001,采集种子的图像数据;
29.使用机器学习模型判断种芽朝向,种子“头”朝里时使电机6正转或反转,种子“头”朝外时使电机6反转或正转;
30.最终,使种子完成种芽定向,种子以“头”朝上的姿态落入导种管5中。
31.在上述技术方案的基础上,控制器8根据摄像头2传入的图像数据,判断落种区域1001中是否存在种子,落种区域1001中的种子是否已经处于相对平稳的状态,如果落种区域1001中已经存在种子,并且种子已经平稳处于落种区域1001内,才会进一步判断落种区域 1001中非圆种子的种芽朝向状态。
32.在上述技术方案的基础上,导种管5的具体结构如下:
33.种子入口的上端505均呈椭圆形,以容纳水平横躺的非圆种子;
34.种子入口的下端506均呈圆形,以容纳纵向竖直的非圆种子;
35.种子入口的上端和下端之间通过变径管段连接;
36.所述变径管段的一侧管壁斜向延伸形成支撑斜面503,斜向延伸的方向为种子入口的上端的椭圆形长轴轴线方向;
37.两个种子入口中,一侧的支撑斜面靠近电机6的电机轴,另一侧的支撑斜面远离电机6的电机轴;
38.支撑斜面用于对种子“头”形成支撑,使种子的另一端先落入种子入口的下端,实现种芽定向,种子以“头”朝上的姿态落入导种管 5中。
39.本发明所述的一种基于机器学习的非圆种子种芽定向机构,具有以下有益效果:
40.所述定向机构通过机器学习对非圆种子种芽的朝向进行识别,再通过机械结构对非圆种子种芽的朝向进行调整,提高了定向机构的通用性,可准确、高效的对非圆种子种芽的朝向进行调整,所述定向机构可在播种或者育种阶段使用,满足农艺要求,提高播种效率,减轻劳动强度,提高产量。
附图说明
41.本发明有如下附图:
42.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:
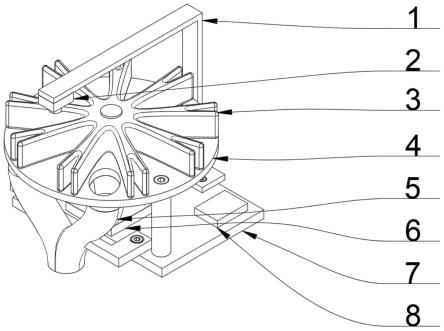
43.图1本发明所述一种基于机器学习的非圆种子种芽定向机构的结构图。
44.图2本发明所述支柱示意图。
45.图3本发明所述平台的结构图。
46.图4本发明所述转盘的结构图。
47.图5本发明所述平台及转盘俯视图。
48.图6本发明所述落种区域示意图。
49.图7本发明所述种子进入落种区域示意图。
50.图8本发明所述采集范围示意图。
51.图9本发明所述水稻芽种示意图。
52.图10本发明所述大蒜鳞芽示意图。
53.图11本发明所述导种管的结构图。
54.图12本发明所述导种管的立体图。
55.图13本发明所述种芽定向过程示意图。
56.图14本发明所述变径管段截面图。
具体实施方式
57.以下结合附图对本发明作进一步详细说明。所述详细说明,为结合本发明的示范性实施例做出的说明,其中包括本发明实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本发明的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
58.本发明中使用的方位,例如上、下、里、外等,是为了说明专利的工作原理,并不是只能使用专利中描述的方位。本发明中提及的使用场景,是为了说明专利的工作流程,并不是只能在该场景下使用本发明。
59.如图1、图2所示,本发明给出了一种基于机器学习的非圆种子种芽定向机构,包括:
60.底座7,作为整个定向机构的支撑部分;
61.使用本发明所述定向机构时,可通过底座7将整个定向机构安装于其他设备上,将本发明所述定向机构作为其他设备的部件使用;
62.作为可选择的实施方案之一,底座7呈矩形,或呈圆形;图1所示实施例中,底座7呈矩形;
63.平台4,设置在底座7的上方,平台4和底座7之间通过支柱701 连接;平台4和底座7之间留有空间,所述空间用于容纳安装在底座 7上的部件;
64.作为可选择的实施方案之一,为了支撑牢固,所述支柱的数量不少于三根,例如:三根支柱呈三角形设置在平台4和底座7之间,四根支柱呈矩形设置在平台4和底座7之间;
65.作为可选择的实施方案之一,平台4呈矩形,或呈圆形;图1、图3所示实施例中,平台4呈圆形,三根支柱701呈三角形设置在平台4和底座7之间;平台4上设有与支柱对应的第一沉头孔401、第二沉头孔402、第三沉头孔404,支柱与平台通过螺丝连为一体;
66.电机6,设置在底座7上,其输出轴垂直于平台4,并穿出平台 4上设置的电机轴预留孔403;
67.在临近平台4的边缘处,第一落种孔405和第二落种孔406左右对称的间隔设置;
68.作为可选择的实施方案之一,第一落种孔405和第二落种孔406 形状、尺寸均相同;例如:第一落种孔405和第二落种孔406均为椭圆形孔,孔的长轴轴线朝向平台4的中心点;平台4为圆形时,中心点可为圆心或临近圆心的区域;
69.导种管5,设于底座7的一侧,且位于平台4下方,导种管5整体呈y字形,其上部为两个分支导种管,下部为总导种管,所述分支导种管的上端设有种子入口,所述总导种管的下端设有种子出口,两个种子入口分别与一个落种孔连通,分支导种管的下端均与总导种管连通;平台4上的非圆种子可以从落种孔(指第一落种孔405和第二落种孔406之一)掉落到分支导种管内,并下落到总导种管中;
70.如图11、图12所示,左分支导种管501和右分支导种管502的上端,分别设有左种子入口503和右种子入口504;在分支导种管和总导种管的连接处,设有安装支架,用于将导种管5与底座7固定连接;
71.转盘3,设于平台4的上方,与电机6的输出轴连接;电机6可驱动转盘3在平台4表面转动;转盘3设有若干拨种臂,相邻拨种臂之间的间隙用于容纳一粒非圆种子;图4所示实施例中,转盘3设有九个等间隔设置的拨种臂,拨种臂的自由端设有y形分叉,y形分叉一方面可减少材料的使用且兼具美感,另一方面y形分叉向相邻的拨种臂方向延伸,对间隙中的非圆种子起到阻拦的作用,防止非圆种子从两个拨种臂之间的间隙处掉落到平台4之外;
72.如图5、图6所示,两个落种孔之间居中的位置为落种区域1001,两个落种孔之间可容纳两个拨种臂;使用时,非圆种子落在落种区域 1001,恰位于两个落种孔之间,转盘3正转或反转,使非圆种子落入一侧的落种孔中;
73.摄像头2,设于转盘3的上方,正对落种区域1001的位置,用于采集落于此处的非圆种子的图像;
74.作为可选择的实施方案之一,平台4的边缘处设有摄像头支架1,摄像头2可拆装的
设置在摄像头支架1上;
75.控制器8,设置在底座7上;
76.控制器8和电机6之间通过导线连接,用于控制电机6的转动速度、转动方向及转动角度;
77.控制器8和摄像头2之间通过导线连接,用于获取并处理摄像头 2采集的非圆种子的图像数据。
78.在上述技术方案的基础上,控制器8通过机器学习对非圆种子种芽的朝向进行识别,再控制电机6转动,使非圆种子落入左侧或右侧的落种孔中。
79.在上述技术方案的基础上,所述控制器8通过机器学习对非圆种子种芽的朝向进行识别,具体步骤如下:
80.训练机器学习模型阶段:如图7、图8所示,让种子进入落种区域1001,采集种子的图像数据;采集范围1101大于落种区域1001;
81.采集大量图像数据后,例如,采集500张种子的图像数据后,将采集到的图像以种芽作为“头”部,分类为种子“头”朝里和“头”朝外两种类型,形成训练集;
82.使用训练集训练机器学习模型;
83.使用机器学习模型阶段:完成训练后,让种子进入落种区域1001,采集种子的图像数据;
84.使用机器学习模型判断种芽朝向,种子“头”朝里时使电机6正转或反转,种子“头”朝外时使电机6反转或正转;
85.最终,使种子完成种芽定向,种子以“头”朝上的姿态落入导种管5中。
[0086]“头”是一种通俗的说法,可以理解为水稻芽种或者大蒜鳞芽,如图9、图10所示,水稻芽种901被识别为水稻种子的“头”,大蒜鳞芽902被识别为大蒜种子的“头”。
[0087]
在上述技术方案的基础上,通过外部供种设备(外部供种设备图中未示出)实现让种子进入落种区域1001,且每一次供一颗种子。
[0088]
在上述技术方案的基础上,控制器8根据摄像头2传入的图像数据,判断该处是否存在种子,该处的种子是否已经处于相对平稳的状态,如果该处已经存在种子,并且种子已经平稳处于该处,才会进一步判断该处的种芽朝向状态。
[0089]
在上述技术方案的基础上,如图13、图14所示,所述非圆种子种芽定向在导种管5的种子入口处(指左分支导种管501的左种子入口503,以及右分支导种管502的右种子入口504)完成,具体说:
[0090]
种子入口的上端505均呈椭圆形,以容纳水平横躺的非圆种子,水平横躺的非圆种子可参见图7;
[0091]
种子入口的下端506均呈圆形,以容纳纵向竖直的非圆种子;
[0092]
种子入口的上端和下端之间通过变径管段连接;
[0093]
所述变径管段的一侧管壁斜向延伸形成支撑斜面503,斜向延伸的方向为种子入口的上端的椭圆形长轴轴线方向;
[0094]
两个种子入口中,一侧的支撑斜面靠近电机6的电机轴,另一侧的支撑斜面远离电机6的电机轴;
[0095]
支撑斜面用于对种子“头”形成支撑,使种子的另一端先落入种子入口的下端,实
现种芽定向,种子以“头”朝上的姿态落入导种管 5中。
[0096]
通过变径管段的支撑斜面,横躺的非圆种子只能以竖直状态落入分支导种管内,种子从平躺转换为竖直的过程,就是实现种芽朝向调整的过程,参见图13所示,大致分为四个状态。
[0097]
状态1时,种子从落种区域1001随着转盘3的转动,被拨种臂移动到种子入口的上方。种子下方没有支撑,只受到重力作用,种子处于静力不平衡状态,种子在重力的作用下,将向下掉落。
[0098]
状态2时,种子掉落到种子入口处,呈水平横躺的状态;
[0099]
状态3时,支撑斜面先接触到种子“头”并形成支撑,种子逐渐倾斜,种子“头”抵靠在支撑斜面上,而另一端(种子“尾”)在重力的作用下先落入种子入口的下端;
[0100]
状态4时,种子在重力的作用以及管壁的限制下,以“头”部朝上的姿态落入导种管5的管道中。
[0101]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0102]
以上所述仅为本发明的较佳实施方式,本发明的保护范围并不以上述实施方式为限,但凡本领域技术人员根据本发明所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1