一种光能园艺割草机的制作方法
1.本发明涉及一种割草机,尤其涉及一种光能园艺割草机。
背景技术:
2.在建造园林时,为了使园林的环境更加优美,人们会在园林里种植许多的小草,小草生长到一定的高度时,为了不影响美观,需要进行割草。
3.专利授权公告号为cn204994257u一种园林用割草机,该割草机包括园林用割草机本体,所述园林用割草机本体设置有支架,所述园林用割草机本体设置有电机外罩,所述电机外罩安装在园林用割草机本体的外侧,所述园林用割草机本体设置有粉碎刀,所述粉碎刀安装在园林用割草机本体的下部,所述粉碎刀设置有三排,竖向排列,所述园林用割草机本体设置有调高装置,所述调高装置安装在粉碎刀的上方,所述园林用割草机本体上设置有降温装置,所述降温装置安装在粉碎刀的上方,所述园林用割草机本体设置有可调节把手。该割草机在使用时,支架将整个割草机固定一起,驱动电机驱动粉碎机工作,其上的降温装置可以减少因为工作时间长而导致的温度上升所引起的损坏,电机外罩将驱动装置包裹,调高装置可以调节粉碎刀的高度,可以依据需要将草坪切割成相应的高度,抽风机将切割下来的草收集到收集箱中,可调节把手可以根据操作人员的高度进行调节,滑轮可以方便移动,但是该割草机不具备太阳能蓄电功能,续航能力较差,不能够在使用过程中自动充电。
4.因此,发明一种续航能力好,且能够在使用过程中吸收阳光进行自动充电的光能园艺割草机。
技术实现要素:
5.为了克服现有的该割草机不具备太阳能蓄电功能,续航能力较差,不能够在使用过程中自动充电的缺点,本发明的技术问题是:提供一种续航能力好,且能够在使用过程中吸收阳光进行充电的光能园艺割草机。
6.一种光能园艺割草机,包括:框架,框架左右两侧均转动式设置有七个轮子;固定杆,框架顶部中间位置左右对称设置有固定杆;启动按钮,右侧的固定杆上部设置有启动按钮;连接框,框架前部设置有连接框;第一驱动电机,连接框内顶部设置有第一驱动电机;刀片,第一驱动电机的输出轴上设置有能够对杂草进行切割的刀片;储能机构,框架顶部设置有能够进行蓄电的储能机构;翻转机构,框架顶部设置有能够推动储能机构向外翻转的翻转机构;装料机构,框架后侧设置有能够收集杂草的装料机构。
7.在本发明一个较佳实施例中,储能机构包括:第一太阳能板,框架顶部前侧设置有第一太阳能板,第一太阳能板位于连接框后侧;第一固定块,框架顶部左右两侧均前后对称设置有第一固定块;第二太阳能板,前后两个第一固定块之间均转动式设置有第二太阳能板,第一太阳能板与第二太阳能板将太阳能转化成电能为蓄电池进行蓄电;扭力弹簧,第二太阳能板与相近的第一固定块之间绕接有扭力弹簧。
8.在本发明一个较佳实施例中,翻转机构包括:第一导轨,框架顶部中间位置左右对称设置有第一导轨,第一导轨位于两个固定杆之间的位置;滑动板,两个第一导轨之间滑动式设置有滑动板,滑动板向上滑动与两个第二太阳能板接触;第二驱动电机,框架顶部中前侧设置有第二驱动电机;绕线轮,第二驱动电机的输出轴上设置有绕线轮;绳子,绕线轮上绕卷有绳子,绳子尾端与滑动板底部连接;位移传感器,连接框顶部中前侧位置设置有位移传感器;复位弹簧,滑动板底部左右两侧与框架顶部之间均绕接有复位弹簧,复位弹簧初始状态为压缩状态。
9.在本发明一个较佳实施例中,装料机构包括:连接块,框架后侧左右对称设置有连接块;装料箱,两个连接块之间滑动式设置有能够收集杂草的装料箱,装料箱位于框架底部;第二固定块,装料箱顶部前侧设置有第二固定块;电动推杆,框架顶部后侧设置有电动推杆,电动推杆的伸长端伸长穿入第二固定块;压力传感器,装料箱顶部后侧设置有压力传感器;距离传感器,框架中部后侧中间位置设置有距离传感器。
10.在本发明一个较佳实施例中,还包括有能够拨动杂草进入装料箱内的旋转机构,旋转机构包括:第一连接杆,左右两侧中间位置的轮子内侧均通过联轴器设置有第一连接杆;全齿轮,两个第一连接杆相向一端均设置有全齿轮;第三固定块,框架底部左右对称设置有第三固定块;转动杆,两个第三固定块之间转动式设置有转动杆,转动杆与连接框转动式连接;单向齿轮,转动杆左右两端均通过单项轴承设置有单向齿轮,单向齿轮均与相近的全齿轮相互啮合;滑动杆,转动杆中部均匀间隔滑动式设置有九个能够拨动杂草的滑动杆;第一连接弹簧,九个滑动杆顶部与转动杆之间均连接有第一连接弹簧。
11.在本发明一个较佳实施例中,还包括有能够将装料箱关闭的启动机构,启动机构包括:第三驱动电机,装料箱顶部中间位置设置有第三驱动电机,第三驱动电机的输出轴贯穿装料箱;转动框,第三驱动电机的输出轴设置有转动框,转动框位于装料箱内;复位按钮,装料箱顶部设置有复位按钮,复位按钮位于第三驱动电机后侧。
12.在本发明一个较佳实施例中,还包括有能够控制第一驱动电机关闭的开关机构,开关机构包括:第二导轨,框架左后部设置有第二导轨;滑动块,第二导轨上滑动式设置有滑动块;第四固定块,框架左后部设置有第四固定块,第四固定块位于第二导轨后侧;接触按钮,第四固定块前侧设置有接触按钮,滑动块向后滑动与接触按钮接触;第二连接杆,装料箱顶部左前侧设置有第二连接杆;楔形块,第二连接杆左端滑动式设置有楔形块,楔形块与滑动块接触;第二连接弹簧,楔形块与第二连接杆内部之间连接有第二连接弹簧。
13.在本发明一个较佳实施例中,还包括:控制箱,框架顶部中间位置设置有控制箱,控制箱位于两个第一导轨之间的位置,电路箱内设有蓄电池、控制模块和电源模块,蓄电池为光能园艺割草机供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路;启动按钮、位移传感器、压力传感器、距离传感器、复位按钮和接触按钮与控制模块通过电性连接,第一驱动电机、第二驱动电机、电动推杆和第三驱动电机与控制模块通过外围电路连接。
14.与现有技术相比,本发明具有以下优点:1、刀片转动能够进行除草作业,位移传感器感应到刀片转动使得滑动板向上滑动推动第二太阳能板向外转动与阳光接触的面积增大,在第一太阳能板与第二太阳能板的作用下,能够将太阳能转化成电能为蓄电池进行蓄
电。
15.2、在连接框与框架的作用下,切除的杂草随之进入装料箱内集中收集。
16.3、在工作人员推动本装置进行移动除草的过程中,在全齿轮与单向齿轮相互啮合的作用下,进而使得滑动杆转动将刀片切割下的杂草拨动至装料箱内集中收集。
17.4、工作人员将装料箱取出之后,通过第三驱动电机的输出轴转动带动转动框转动将装料箱关闭,能够防止杂草掉落。
18.5、在工作人员取出装料箱的同时能够使得第一驱动电机关闭,进而使得刀片停止转动。
附图说明
19.图1为本发明的第一种立体结构示意图。
20.图2为本发明的第二种立体结构示意图。
21.图3为本发明的剖视结构示意图。
22.图4为本发明储存机构的立体结构示意图。
23.图5为本发明储存机构的部分立体结构示意图。
24.图6为本发明翻转机构的立体结构示意图。
25.图7为本发明翻转机构的部分立体结构示意图。
26.图8为本发明装料机构的立体结构示意图。
27.图9为本发明旋转机构的立体结构示意图。
28.图10为本发明旋转机构的部分剖视结构示意图。
29.图11为本发明启动机构的立体结构示意图。
30.图12为本发明启动机构的部分剖视结构示意图。
31.图13为本发明开关机构的立体结构示意图。
32.图14为本发明开关机构的部分剖视结构示意图。
33.图15为本发明的电路框图。
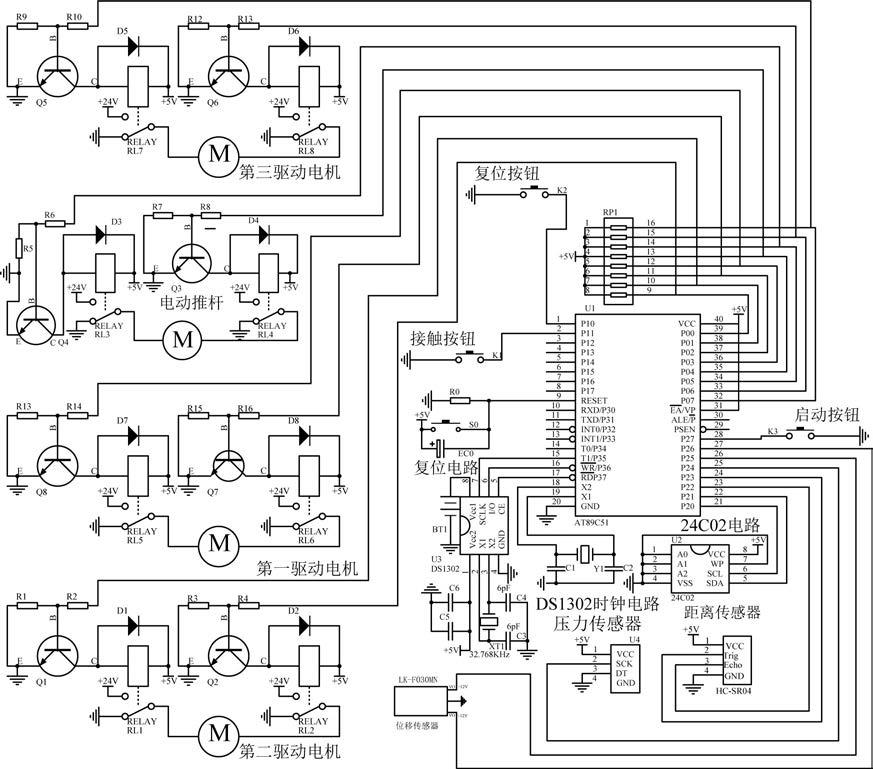
34.图16为本发明的电路原理图。
35.图中标号名称:1_框架,2_轮子,3_固定杆,4_控制箱,5_启动按钮,6_连接框,7_第一驱动电机,8_刀片,9_储能机构,91_第一太阳能板,92_第一固定块,93_第二太阳能板,94_扭力弹簧,10_翻转机构,101_第一导轨,102_滑动板,103_第二驱动电机,104_绕线轮,105_绳子,106_位移传感器,107_复位弹簧,11_装料机构,111_连接块,112_装料箱,113_第二固定块,114_电动推杆,115_压力传感器,116_距离传感器,12_旋转机构,121_第一连接杆,122_全齿轮,123_第三固定块,124_转动杆,125_单向齿轮,126_滑动杆,127_第一连接弹簧,13_启动机构,131_第三驱动电机,132_转动框,133_复位按钮,14_开关机构,141_第二导轨,142_滑动块,143_第四固定块,144_接触按钮,145_第二连接杆,146_楔形块,147_第二连接弹簧。
具体实施方式
36.现在将参照附图在下文中更全面地描述本发明,在附图中示出了本发明当前优选的实施方式。然而,本发明可以以许多不同的形式实施,并且不应被解释为限于本文所阐述
的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本发明的范围充分地传达给技术人员。
37.实施例1请参阅图1-图8所示,一种光能园艺割草机,包括有框架1、轮子2、固定杆3、控制箱4、启动按钮5、连接框6、第一驱动电机7、刀片8、储能机构9、翻转机构10和装料机构11,框架1左右两侧均转动式设置有七个轮子2,框架1顶部中间位置左右对称通过螺钉连接的方式设置有固定杆3,右侧的固定杆3上部设置有启动按钮5,框架1前部焊接有连接框6,连接框6内顶部设置有第一驱动电机7,第一驱动电机7的输出轴上设置有刀片8,刀片8用于对杂草进行切割,框架1顶部设置有储能机构9,储能机构9用于进行蓄电,框架1顶部设置有翻转机构10,翻转机构10用于推动储能机构9向外翻转,框架1后侧设置有装料机构11,装料机构11用于收集杂草。
38.在需要对园林的杂草进行割除时,工作人员按下电源总开关使整个装置通电,工作人员推动固定杆3使得轮子2在地面滚动,进而实现了对本装置进行移动,当本装置移动至合适位置时,工作人员按压启动按钮5发出信号,控制模块收到信号后控制第一驱动电机7的输出轴转动,第一驱动电机7输出轴转动带动刀片8转动,然后工作人员继续通过推动固定杆3使得轮子2在地面滚动带动整个装置进行移动对需要除草的区域进行清理,杂草随之进入装料机构11集中收集,同时,通过翻转机构10转动推动储能机构9背向转动,进而使得储能机构9与阳光接触的面积增大,储能机构9能够对蓄电池进行蓄电为整个装置进行供电,除草完成后,工作人员再次按压启动按钮5发出信号,控制模块收到信号后控制第一驱动电机7的输出轴停止转动,刀片8随之停止转动,本装置使用完成后,工作人员再次按下电源总开关使整个装置断电。本装置结构简单,便于操作。
39.实施例2请参阅图4-图5所示,在实施例1的基础之上,储能机构9包括有第一太阳能板91、第一固定块92、第二太阳能板93和扭力弹簧94,框架1顶部前侧设置有第一太阳能板91,第一太阳能板91位于连接框6后侧,框架1顶部左右两侧均前后对称焊接有第一固定块92,前后两个第一固定块92之间均转动式设置有第二太阳能板93,第一太阳能板91与第二太阳能板93将太阳能转化成电能为蓄电池进行蓄电,第二太阳能板93与相近的第一固定块92之间绕接有扭力弹簧94。
40.请参阅图6-图7所示,翻转机构10包括有第一导轨101、滑动板102、第二驱动电机103、绕线轮104、绳子105、位移传感器106和复位弹簧107,框架1顶部中间位置左右对称焊接有第一导轨101,第一导轨101位于两个固定杆3之间的位置,两个第一导轨101之间滑动式设置有滑动板102,滑动板102向上滑动与两个第二太阳能板93接触,框架1顶部中前侧设置有第二驱动电机103,第二驱动电机103的输出轴上键连接有绕线轮104,绕线轮104上绕卷有绳子105,绳子105尾端与滑动板102底部连接,连接框6顶部中前侧位置设置有位移传感器106,滑动板102底部左右两侧与框架1顶部之间均绕接有复位弹簧107,复位弹簧107初始状态为压缩状态。
41.请参阅图8所示,装料机构11包括有连接块111、装料箱112、第二固定块113、电动推杆114、压力传感器115和距离传感器116,框架1后侧左右对称通过螺钉连接的方式设置有连接块111,两个连接块111之间滑动式设置有装料箱112,装料箱112用于收集杂草,装料
箱112位于框架1底部,装料箱112顶部前侧设置有第二固定块113,框架1顶部后侧设置有电动推杆114,电动推杆114的伸长端伸长穿入第二固定块113,装料箱112顶部后侧设置有压力传感器115,框架1中部后侧中间位置设置有距离传感器116。
42.当位移传感器106感应到刀片8转动时,位移传感器106发出信号,控制模块收到信号后控制第二驱动电机103的输出轴转动10秒,然后停止转动,第二驱动电机103的输出轴转动带动绕线轮104转动,绕线轮104转动放松绳子105,复位弹簧107随之复位带动滑动板102向上滑动,滑动板102向上滑动推动第二太阳能板93向外转动,扭力弹簧94随之发生形变,进而使得第一太阳能板91和第二太阳能板93与阳光接触的面积增大,在第一太阳能板91与第二太阳能板93的作用下,能够将太阳能转化成电能为蓄电池进行蓄电,当位移传感器106感应到刀片8停止转动时,位移传感器106发出信号,控制模块收到信号后控制第二驱动电机103的输出轴反转10秒,然后停止运作,第二驱动电机103的输出轴反转带动绕线轮104反转,绕线轮104反转通过收卷绳子105带动滑动板102向下滑动,复位弹簧107随之被压缩,滑动板102向下滑动不再挤压第二太阳能板93,扭力弹簧94随之复位带动第二太阳能板93向内转动复位,刀片8转动除草的过程中,在连接框6与框架1的作用下,切除的杂草随之进入装料箱112内,当压力传感器115感应到装料箱112内收集的杂草重量达到预设值时,压力传感器115发出信号,控制模块收到信号后控制电动推杆114的伸长端缩短5秒,然后停止运作,电动推杆114的伸长端缩短不再穿入第二固定块113,这时工作人员拉动装料箱112向后滑动取下对收集的杂草进行清理,清理完成后,工作人员再次向前推动装料箱112安装复位,当距离传感器116感应到与装料箱112的距离缩短时,距离传感器116发出信号,控制模块收到信号后控制电动推杆114的伸长端伸长5秒,然后停止运作,电动推杆114的伸长端伸长穿入第二固定块113对装料箱112进行限位。本装置结构简单,刀片8转动能够进行除草作业,位移传感器106感应到刀片8转动使得滑动板102向上滑动推动第二太阳能板93向外转动与阳光接触的面积增大,在第一太阳能板91与第二太阳能板93的作用下,能够将太阳能转化成电能为蓄电池进行蓄电,在连接框6与框架1的作用下,切除的杂草随之进入装料箱112内集中收集。
43.实施例3请参阅图2和图9-图10所示,在实施例2的基础之上,还包括有旋转机构12,旋转机构12用于拨动杂草进入装料箱112内,旋转机构12包括有第一连接杆121、全齿轮122、第三固定块123、转动杆124、单向齿轮125、滑动杆126和第一连接弹簧127,左右两侧中间位置的轮子2内侧均通过联轴器设置有第一连接杆121,两个第一连接杆121相向一端均键连接有全齿轮122,框架1底部左右对称设置有第三固定块123,两个第三固定块123之间转动式设置有转动杆124,转动杆124与连接框6转动式连接,转动杆124左右两端均通过单项轴承设置有单向齿轮125,单向齿轮125均与相近的全齿轮122相互啮合,转动杆124中部均匀间隔滑动式设置有九个滑动杆126,滑动杆126用于拨动杂草,九个滑动杆126顶部与转动杆124之间均连接有第一连接弹簧127。
44.在工作人员推动固定杆3带动轮子2在地面滚动,使得本装置进行移动除草的过程中,轮子2转动带动第一连接杆121转动,第一连接杆121转动带动全齿轮122转动,全齿轮122转动通过单项轴承带动单向齿轮125转动,单向齿轮125带动转动杆124转动,转动杆124转动带动滑动杆126转动,滑动杆126转动将刀片8切割下的杂草拨动至装料箱112内集中收
集,滑动杆126转动与框架1底部或者凸起的地面接触时随之向内滑动,第一连接弹簧127随之被压缩,当滑动杆126转动与框架1底部或者凸起的地面脱离接触时,第一连接弹簧127随之复位带动滑动杆126向外滑动复位,在单项轴承的作用下,工作人员反向推动本装置移动不会使得转动杆124转动。本装置结构简单,在工作人员推动本装置进行移动除草的过程中,在全齿轮122与单向齿轮125相互啮合的作用下,进而使得滑动杆126转动将刀片8切割下的杂草拨动至装料箱112内集中收集。
45.请参阅图1和图11-图12所示,还包括有启动机构13,启动机构13用于将装料箱112关闭,启动机构13包括有第三驱动电机131、转动框132和复位按钮133,装料箱112顶部中间位置设置有第三驱动电机131,第三驱动电机131的输出轴贯穿装料箱112,第三驱动电机131的输出轴设置有转动框132,转动框132位于装料箱112内,装料箱112顶部设置有复位按钮133,复位按钮133位于第三驱动电机131后侧。
46.当距离传感器116感应到与装料箱112的距离加长时,距离传感器116发出信号,控制模块收到信号后控制第三驱动电机131的输出轴转动5秒,然后停止运作,第三驱动电机131的输出轴转动带动转动框132转动将装料箱112关闭,当工作人员需要将装料箱112内的杂草倒出时,工作人员按压复位按钮133发出信号,控制模块收到信号后控制第三驱动电机131的输出轴反转5秒,然后停止运作,第三驱动电机131的输出轴反转带动转动框132反转将装料箱112打开,然后工作人员将装料箱112内的杂草倾倒出来。本装置结构简单,工作人员将装料箱112取出之后,通过第三驱动电机131的输出轴转动带动转动框132转动将装料箱112关闭,能够防止杂草掉落。
47.请参阅图1和图13-图14所示,还包括有开关机构14,开关机构14用于控制第一驱动电机7关闭,开关机构14包括有第二导轨141、滑动块142、第四固定块143、接触按钮144、第二连接杆145、楔形块146和第二连接弹簧147,框架1左后部通过螺钉连接的方式设置有第二导轨141,第二导轨141上滑动式设置有滑动块142,框架1左后部设置有第四固定块143,第四固定块143位于第二导轨141后侧,第四固定块143前侧设置有接触按钮144,滑动块142向后滑动与接触按钮144接触,装料箱112顶部左前侧焊接有第二连接杆145,第二连接杆145左端滑动式设置有楔形块146,楔形块146与滑动块142接触,楔形块146与第二连接杆145内部之间连接有第二连接弹簧147。
48.装料箱112向后滑动通过第二连接杆145带动楔形块146向后移动,楔形块146向后移动推动滑动块142向后滑动,滑动块142向后滑动挤压接触按钮144发出信号,控制模块收到信号后控制第一驱动电机7的输出轴停止运作,此时装料箱112继续向后滑动使得楔形块146继续向后滑动,在滑动块142的作用下,楔形块146随之向右滑动,第二连接弹簧147随之被压缩,当楔形块146与滑动块142脱离时,第二连接弹簧147随之复位带动楔形块146向左滑动复位,当杂草清理完成后,装料箱112向前滑动复位,装料箱112向前滑动通过第二连接杆145带动楔形块146向前移动,楔形块146向前移动推动滑动块142向前滑动复位不再挤压接触按钮144,装料箱112继续向前滑动使得楔形块146继续向前滑动,在滑动块142的作用下,楔形块146随之向右滑动,第二连接弹簧147随之被压缩,当楔形块146与滑动块142脱离时,第二连接弹簧147随之复位带动楔形块146向左滑动复位,当需要继续使用本装置进行除草时,工作人员再次按压启动按钮5即可。本装置结构简单,在工作人员取出装料箱112的同时能够使得第一驱动电机7关闭,进而使得刀片8停止转动。
49.请参阅图1、图15和图16所示,还包括有控制箱4,框架1顶部中间位置设置有控制箱4,控制箱4位于两个第一导轨101之间的位置,电路箱内设有蓄电池、控制模块和电源模块,蓄电池为光能园艺割草机供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路;启动按钮5、位移传感器106、压力传感器115、距离传感器116、复位按钮133和接触按钮144与控制模块通过电性连接,第一驱动电机7、第二驱动电机103、电动推杆114和第三驱动电机131与控制模块通过外围电路连接。
50.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1