具有操作杆的作业机的制作方法
1.本发明涉及一种具有操作杆的作业机。
背景技术:
2.传统具有操作杆的作业机,如已知的打草机、割灌机、高枝修、长杆锯等,普遍存在控制器难以布置的问题,尤其是在由无刷马达驱动的具有操作杆的作业机中,由于无刷马达所对应采用的控制器具有一定的尺寸和重量,一般为了减小前端的作业部分的尺寸和重量,故将控制器设置于后端的供电部分中,但是,此类布置存在诸多问题,尤其特别是:直接导致控制器与马达之间的电力线距离过长,存在诸多干扰,严重影响emc测试,其次,控制器存在工作发热的问题,而供电部分本身也是发热源,二者配置于一处,导致需要配置散热结构辅助其散热;此外,还需要考虑设置控制器的安装定位结构等等,直接影响产品开发。
技术实现要素:
3.本发明提供一种具有操作杆的作业机,旨在解决现有技术中控制器难以布置的问题,其控制器布置方便简洁。
4.有鉴于此,本发明提供的一种具有操作杆的作业机,其包括:
5.操作杆;
6.前端端元,其设置于所述操作杆的一端,且安装有适于驱动作业部件的电动马达;
7.后端端元,其设置于所述操作杆的另一端,且安装有适于供电于所述电动马达的电源;
8.其还包括:
9.控制器,其适于控制所述电动马达的驱动,且安装于所述操作杆内;
10.所述电动马达经由所述控制器与所述电源电连接。
11.进一步地,所述控制器靠近所述电动马达、远离所述电源。
12.进一步地,所述控制器包括基座和设置于所述基座上的电路板,所述基座与所述操作杆的内壁抵接定位。
13.进一步地,所述基座包括适于与所述操作杆的内壁相抵接定位的抵接部,所述抵接部的外表面呈弧形,并与所述操作杆的内壁形状相应。
14.进一步地,所述基座为铝基座,所述操作杆为铝管。
15.进一步地,所述电路板与所述基座之间设置有绝缘体。
16.进一步地,所述绝缘体为导热绝缘体。
17.进一步地,所述控制器的径向宽度不大于23mm。
18.进一步地,所述操作杆远离所述电动马达的一端与外界相连通,适于外界气流导入并沿着所述操作杆的内腔流经所述控制器,从所述前端端元流出。
19.进一步地,所述控制器与所述操作杆的内壁之间设有气流通道。
20.进一步地,所述电源为至少一电池包,其以能够拆装的方式安装于所述后端端元,
向所述电动马达供给电力。
21.本发明继续地提供一种具有操作杆的作业机,其包括:
22.作业部,其内置有作为驱动源的电动马达;
23.供电部,其用于向所述电动马达供给电力;
24.以及,
25.操作杆,其为管形,在其前部支承有所述作业部,在后部支承有所述供电部;
26.其还包括:
27.控制器,其适于控制所述电动马达的驱动,且安装于所述操作杆内;
28.电力线,其穿设于所述操作杆内,以将所述供电部、所述控制器和所述作业部依次连接,并于所形成的电路上配置电开关。
29.进一步地,所述电动马达为无刷马达,所述无刷马达包括u相端子、v相端子和w相端子,所述电力线至少包括连接至所述u相端子的第一马达电力线、连接至所述v相端子的第二马达电力线和连接至所述w相端子的第三马达电力线。
30.进一步地,所述控制器的长度方向沿着所述操作杆的纵向轴线方向延伸,垂直于长度方向的径向宽度不大于23mm。
31.进一步地,所述控制器靠近所述电动马达、远离所述电源。
32.进一步地,所述控制器包括适于与所述操作杆的内壁相抵接的基座,所述基座至少部分的形状与所述操作杆的内壁形状相应。
33.进一步地,所述控制器还包括设置于所述基座上的电路板,所述电路板与所述基座之间绝缘设置。
34.进一步地,所述控制器与所述操作杆的内壁之间配合形成有气流通道,所述气流通道与外界相连通,作业状态下,外界气流流经所述气流通道掠过所述控制器从所述作业部流出。
35.本发明继续地提供一种具有操作杆的作业机,其包括:
36.作业部,其内置有作为驱动源的电动马达;
37.供电部,其用于向所述电动马达供给电力;
38.以及,
39.操作杆,其前部支承有所述作业部,在后部支承有所述供电部;
40.其还包括:
41.控制器,其径向宽度不大于23mm,适于控制所述电动马达的驱动并邻近所述电动马达;
42.电力线,其穿设于所述操作杆内,以将所述供电部、所述控制器和所述作业部依次连接,并于所形成的电路上配置电开关。
43.进一步地,所述电动马达为无刷马达,所述无刷马达包括u相端子、v相端子和w相端子,所述电力线至少包括连接至所述u相端子的第一马达电力线、连接至所述v相端子的第二马达电力线和连接至所述w相端子的第三马达电力线。
44.本发明继续地提供一种具有操作杆的作业机,其包括:
45.作业头;
46.电源,其用于供给电力;
47.电动马达,其为驱动源,以接收所述电力使驱动轴旋转,并通过驱动轴的旋转使所述作业头进行作业;
48.以及,
49.操作杆,其为管形;
50.其还包括:
51.控制器,其适于控制所述电动马达的驱动,且安装于所述操作杆内;
52.所述电动马达经由所述控制器与所述电源电连接。
53.进一步地,所述控制器沿着所述操作杆的径向方向上的径向宽度不大于23mm。
54.进一步地,所述电动马达为无刷马达。
55.进一步地,所述控制器靠近所述电动马达。
56.进一步地,所述控制器包括适于与所述操作杆的内壁相抵接的基座,所述基座至少部分的形状与所述操作杆的内壁形状相应。
57.进一步地,所述电源为内置于所述作业机内的电池或外置于所述作业机上的至少一电池包,其以能够拆装的方式安装于所述作业机,向所述电动马达供给电力。
58.较现有技术,本发明技术方案的有益技术效果在于:
59.1,在设计过程中,研发设计人员不必再为控制器设置于何处而受到困扰,也不必再去设计控制器的安装结构、散热结构等,直接借用操作杆后控制器的布置将非常方便简洁。
60.2,控制器靠近电动马达、远离电源,如此,控制器与电动马达之间的电力线路将被大大缩短,减少诸多干扰,便于emc测试。
61.3,电路板工作所产生的热量能够通过铝基座更快速地传导至铝管进行更快速散热,相当于整个铝管都作为了控制器的辅助散热器,其散热效率更快更好。
附图说明
62.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
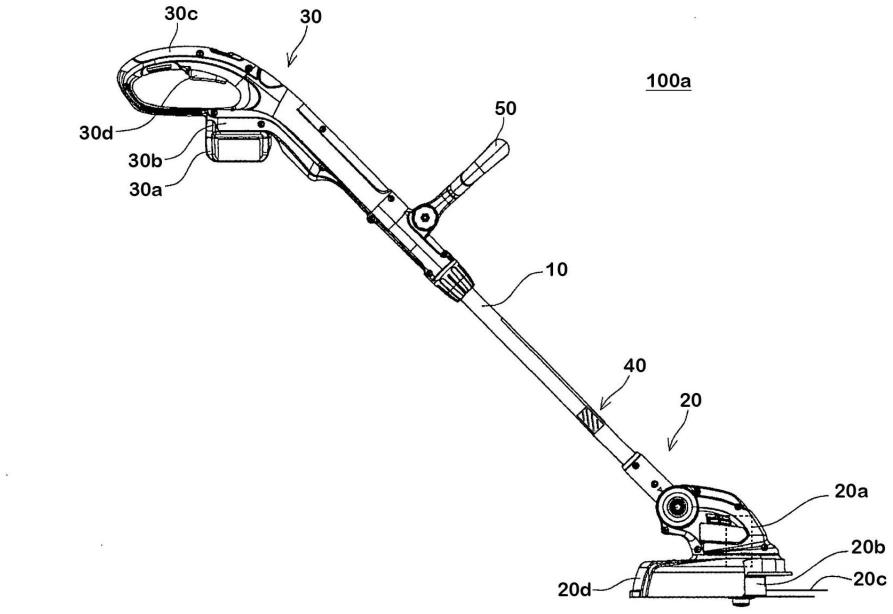
63.图1:本发明具体实施例所提供的打草机结构示意图;
64.图2:本发明具体实施例中操作杆局部结构示意图;
65.图3:本发明具体实施例中控制器结构示意图;
66.图4:本发明具体实施例中图2aa截面示意图;
67.图5:本发明具体实施例中控制器另一结构示意图;
68.图6:本发明具体实施例中控制器位于操作杆内截面示意图;
69.图7:本发明具体实施例中操作杆内气流流动路径示意图;
70.图8:本发明具体实施例所提供的割灌机结构示意图;
71.图9:本发明具体实施例所提供的吸尘器结构示意图。
具体实施方式
72.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
73.一种具有操作杆的作业机,具体地,参照图1所示的打草机100a为例,包括:操作杆10和位于操作杆10两端的前端端元20和后端端元30;其中:
74.前端端元20设置于操作杆10的一端,具体地为前端,且安装有适于驱动作业部件的电动马达20a;
75.后端端元30,其设置于操作杆10的另一端,具体地为相对于上述前端的后端,且安装有适于供电于电动马达20a的电源;
76.其还包括:
77.控制器40,其适于控制电动马达20a的驱动,且安装于操作杆10内;电动马达20a经由内置于操作杆10内的此控制器40与电源电连接。
78.由此,用户操作扳机30d,启动打草机100a内部线路上的电开关,电源与控制器40电力线路接通,经过控制器40供电于电动马达20a驱动作业部件开始打草作业。
79.如此,在设计过程中,研发设计人员不必再为控制器40设置于何处而受到困扰,也不必再去设计控制器40的安装结构、散热结构等,直接借用操作杆后控制器40的布置将非常方便简洁。
80.请继续参照图1所示的打草机100a,在本实施例中,上述作业部件是指用于打草的打草头20b,打草头20b上穿设布置有打草绳20c或打草刀片20c,众所周知,电动马达20a其为驱动源,以接收电源30a供给的电力使驱动轴,如电机轴旋转,并通过驱动轴的旋转带动打草头20b旋转,进而带动打草绳20c或打草刀片20c进行打草作业,进一步,为了保护用户在打草过程中的安全,前端端元20处靠近打草头20b位置处还布置防护罩20d。
81.请继续参照图1所示的打草机100a,在本实施例中,后端端元30处布置的电源为一可拆卸的电池包30a,其以能够拆装自如的方式安装于后端的安装部30b,当然,本技术方案中电源不局限于可拆卸的电池包30a与安装部30b自由拆装的结构,如还可以将电源内置,如内置电池于后端端元30中,也在本技术方案保护范围之内。
82.需要说明的是:在此类具有操作杆的作业机中,多采用锂离子电池为电源单元,此时,控制器40一般具有过载保护、过压保护、过流保护、短路保护、欠压保护、温度保护等作用;如,打草机100a打草过程中发生缠草时,打草头被草缠绕无法正常旋转时,容易发生过载,此时控制器40将切断控制器40与电动马达20a之间的供电线路,保护作业机不被损坏。
83.进一步地,请继续参照图1所示的打草机100a,控制器40靠近电动马达20a、远离电源,如此,控制器40与电动马达20a之间的电力线路将被大大缩短,减少诸多干扰,便于emc测试。
84.请参照图2,图3和图4所示,控制器40包括基座401和设置于基座401上的电路板402,基座401与操作杆10的内壁抵接定位,更具体地,电路板402通过定位件,如螺钉403与基座401固定。在安装控制器40时,只需要将其直接从操作杆10的一端插入即可,此时,控制器40的基座401与操作杆10的内壁形成抵接定位。优选将控制器40从靠近电动马达20a的一端插入。
85.请继续参照图3所示的控制器结构示意图,基座401包括适于与操作杆10的内壁相抵接定位的抵接部401b,抵接部401b的外表面呈弧形,并与操作杆10的内壁形状相应,如此可以更便于控制器40与操作杆10的装配。
86.进一步地,基座401为铝基座,操作杆10为铝管,铝基座和铝管均具有较好的散热性能,特别是,铝基座与铝管的内壁相抵接,电路板402工作所产生的热量能够通过铝基座传导至铝管进行快速散热,尤其特别是,铝基座的抵接部401b的外表面呈弧形,并与操作杆10的内壁形状相应,此时,一方面可以更便于控制器40与操作杆10的装配,另一方面,铝基座与铝管弧面接触,其接触面大,电路板402工作所产生的热量能够通过铝基座更快速地传导至铝管进行更快速散热,相当于整个铝管都作为了控制器的辅助散热器,其散热效率更快更好。
87.另外,电路板402与基座401之间设置有绝缘体,以此避免电路板402异常时,产生漏电时所导致的安全风险。
88.进一步地,上述绝缘体为导热绝缘体,如导热硅胶等。
89.请继续参照图3所示的控制器结构示意图,基座401还包括支承部401c,以及与支承部401c相连接的限位连接部401a,限位连接部401a与支承部401c之间组合形成一夹设限位区域,该区域与电路板402的形状和大小基本对应,以用于将电路板402限位于该区域,如此,电路板402可以基本支承于支承部401c上并由限位连接部401a限位,此时,限位连接部401a上进一步设置有定位孔,通过与之适配的定位件,如螺钉403穿过定位孔将电路板402固定。
90.较为优选地,在具有上述限位区域前提条件下,上述限位连接部401a有且仅有一个定位孔,通过有且仅有一个与之适配的定位件穿过定位孔以将电路板402固定。
91.另外,依旧参照图3所示的控制器结构示意图,上述支承部401c与限位连接部401a相连接的部分构成抵接部401b的局部,抵接部401b的另一端继续沿着与操作杆10相适配的弧线延伸,其延伸的部分与支承部401c之间形成一通道401d。
92.具体地,该通道401d可以用于气流流通,如下将继续阐述
93.请参照图7所示的操作杆10内气流流动路径示意图,操作杆10远离电动马达20a的一端与外界相连通,适于外界气流导入并沿着操作杆10的内腔流经控制器40,从前端端元流出。
94.一般地,后端端元的装配间隙或者操作杆10与后端端元连接的装配间隙,将操作杆10远离电动马达20a的一端与外界相连通,当然,也可以专门设置一进风口。以打草机100a为例,电动马达20a带装有风扇,当作业时候,电动马达20a在电源电力供给作用下开始高速旋转,并带动风扇旋转,以将外界的气流经过上述装配间隙从操作杆的一端导入,并沿着操作杆10的内腔流经控制器40,特别是流经上述通道401d,以及掠过电路板的表面,在基座与操作杆之间的传导散热基础上进一步增加空气流通散热,进一步增强了散热效率和散热效果。
95.进一步,还值得一提的是:控制器40的径向宽度不大于23mm。
96.具体地,请继续参照图4所示,控制器40的径向宽度是指:在操作杆10的径向方向上,控制器40的宽度l,该l不大于23mm,以方便控制器40适应市场上普遍径宽的操作杆10。
97.需要说明的是,上述控制器40不仅局限于上述具有弧形抵接部的结构,其还可以
采用其他结构形式,具体参照图5所示的控制器另一结构示意图。
98.继续参照图5所示的控制器另一结构示意图,控制器40的基座401仍然具有与支承部相连接的限位连接部,并且仍然通过仅有的一颗连接件,如螺钉403将电路板402和基座401固定。
99.请继续参照图6所示的另一控制器结构位于操作杆内的截面图,该控制器40的径向宽度l依旧保持不大于23mm,以方便控制器40适应市场上普遍径宽的操作杆10。
100.当然,该控制器40与操作杆的内壁之间设有气流通道,具体参照图6所示,气流经过气流通道掠过电路板的表面和基座的散热翅。
101.继续地,一种具有操作杆的作业机,具体参照图8所示,以割灌机100b为例,其包括操作杆10,以及位于其前、后两端的作业部20和供电部30,其中:
102.作业部20,其内置有作为驱动源的电动马达20a;
103.供电部30,其用于向电动马达20a供给电力;
104.以及,操作杆10,其为管形,在其前部支承有作业部20,在后部支承有供电部30;
105.其还包括:
106.控制器40,其适于控电动马达20a的驱动,且安装于操作杆10内;
107.电力线(图中未显示),其穿设于操作杆10内,以将供电部30、控制器40和作业部20依次连接,并于所形成的电路上配置电开关(图中未显示)。
108.上述电开关一般设置于与用户操作的扳机相对应,在割灌机100b中,电力线穿设于操作杆10内,以将供电部30、控制器40和作业部20依次连接,具体地,供电部30处的电源经过电力线连接到控制器40,一般地,此处的电力线路将布置上述的电开关,控制器40进一步通过电力线连接至作业部20处的电动马达20a。
109.电动马达20a其为驱动源,以接收电源供给的电力使驱动轴,如电机轴旋转,并通过驱动轴的旋转带动刀片20c旋转,进而进行割灌作业。
110.需要说明的是:上述供电部30优选包括两个相同规格的电池包30a,如上述打草机100a一致,此电池包30a优选为锂离子电池包,其可以与对应的安装包自由拆装连接,当然,本实施例并不局限于电池包外置的电源供电方式,还可以采用电池内置的方式,其依旧处于本技术方案的保护范围之内。
111.同样,在设计过程中,研发设计人员不必再为控制器40设置于何处而受到困扰,也不必再去设计控制器40的安装结构、散热结构等,直接借用操作杆后控制器40的布置将非常方便简洁。
112.进一步地,电动马达20a为无刷马达,无刷马达20a包括u相端子、v相端子和w相端子,电力线至少包括连接至u相端子的第一马达电力线、连接至v相端子的第二马达电力线和连接至w相端子的第三马达电力线。
113.众所周知,无刷马达不使用机械的电刷装置,具有高效率、低能耗、低噪音、超长寿命、高可靠性等优点,所对应的起保护作用的控制器需采用无刷控制器。
114.无刷控制器一般结构较传统有刷电机结构复杂,其需要将经过电池包的dc电流逆变输出为三相电流,即控制器40与无刷马达之间的电力线至少包括连接至u相端子的第一马达电力线、连接至v相端子的第二马达电力线和连接至w相端子的第三马达电力线。
115.此外,控制器40的长度方向沿着操作杆10的纵向轴线方向延伸,垂直于长度方向
的径向宽度不大于23mm,以方便控制器40适应市场上普遍径宽的操作杆10。
116.同样,如上述以打草机100a为例的具体实施例中所言,为了便于emc测试,控制器40靠近电动马达20a、远离电源,即电池包30a,如此,控制器40与电动马达20a之间的电力线路将被大大缩短,减少了诸多干扰,故可以便于emc测试。
117.同样,控制器40优选采用如同图3和图4所示结构,包括适于与操作杆10的内壁相抵接的基座,所述基座至少部分的形状与操作杆10的内壁形状相应,其具有上述实施例所言的所有有益的技术效果。
118.进一步地,控制器40还包括设置于所述基座401上的电路板402,电路板402与基座401之间绝缘设置。
119.进一步地,继续参照图7所示,控制器40与操作杆10的内壁之间配合形成有气流通道,气流通道与外界相连通,作业状态下,外界气流流经所述气流通道掠过所述控制器从所述作业部流出。
120.同样一般地,供电部的装配间隙或者操作杆10与供电部连接的装配间隙,将操作杆10远离电动马达20a的一端与外界相连通,当然,也可以专门设置一进风口。以割灌机100b为例,电动马达20a带装有风扇,当作业时候,电动马达20a在电源电力供给作用下开始高速旋转,并带动风扇旋转,以将外界的气流经过上述装配间隙从操作杆的一端导入,并沿着操作杆10的内腔流经控制器40,特别是流经上述通道401d,以及掠过电路板的表面,在基座与操作杆之间的传导散热基础上进一步增加空气流通散热,进一步增强了散热效率和散热效果。
121.继续地参照图8所示,一种具有操作杆的作业机,具体为割灌机100b,其包括:操作杆10,以及位于操作杆10前端的作业部20和后端的供电部30;
122.作业部20,其内置有作为驱动源的电动马达20a;
123.供电部30,其用于向所述电动马达20a供给电力;
124.操作杆10,其前部支承有作业部20,在后部支承有供电部30;
125.其还包括:
126.控制器40,其径向宽度不大于23mm,适于控制电动马达20a的驱动并邻近电动马达20a;
127.电力线,其穿设于操作杆10内,以将供电部20、控制器40和作业部20依次连接,并于所形成的电路上配置电开关。
128.在本实施例中,控制器40与电动马达20a邻近,不仅局限于上述,将控制器40设置于操作杆10内,还可以将其设置于作业部20内,或者作业部20与操作杆10衔接之处,同时为了避免前端的作业部20体积过大,而且还需要以方便控制器40适应市场上普遍径宽的操作杆10,故特将控制器径向宽度设计为不大于23mm。
129.如此,上述技术方案可以将控制器40与电动马达20a之间的电力线路将被大大缩短,减少诸多干扰,便于emc测试。
130.进一步地,电动马达20a为无刷马达,所述无刷马达包括u相端子、v相端子和w相端子,所述电力线至少包括连接至所述u相端子的第一马达电力线、连接至所述v相端子的第二马达电力线和连接至所述w相端子的第三马达电力线。
131.继续地参照图9所示,一种具有操作杆的作业机,以吸尘器100c为例,其包括:
132.作业头20;
133.电源,其用于供给电力;
134.电动马达,其为驱动源,以接收所述电力使驱动轴旋转,并通过驱动轴的旋转使所述作业头进行作业;
135.以及,
136.操作杆10,其为管形;
137.其还包括:
138.控制器40,其适于控制所述电动马达的驱动,且安装于所述操作杆10内;
139.所述电动马达经由所述控制器与所述电源电连接。
140.进一步地,所述控制器沿着所述操作杆的径向方向上的径向宽度不大于23mm。
141.进一步地,所述电动马达为无刷马达。
142.进一步地,所述控制器靠近所述电动马达。
143.进一步地,所述控制器包括适于与所述操作杆的内壁相抵接的基座,所述基座至少部分的形状与所述操作杆的内壁形状相应。
144.进一步地,所述电源为内置于所述作业机内的电池或外置于所述作业机上的至少一电池包,其以能够拆装的方式安装于所述作业机,向所述电动马达供给电力。
145.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1