一种用于实验动物的关节运动测试系统及测试方法
1.本发明涉及非人灵长类实验动物关节运动测试技术领域,具体涉及一种用于实验动物的关节运动测试系统及测试方法。
背景技术:
2.当前关节炎、关节疼痛、骨折等关节运动机能的研究已十分热门,尤其是在相关的治疗方法和药物等研究上整个社会的投入都在不断加大,但是当前影响其进展的一大障碍是在于“检测”,一直以来在治疗效果的检测上一般都会用到非人灵长类实验动物,通过对实验动物进行疾病造模,然后观察其不同治疗周期的步态情况,以对相关的治疗效果进行评分。目前的做法一般都是采用“强迫式”的方法,即通过将实验动物限制在跑步机上,然后启动跑步机,迫使实验动物在跑步带上行走。比如:一种非人灵长类动物减重康复训练装置,申请(专利)号为cn202010467494.x,其原理是通过将跑步机设置于底部支撑座前侧和动物固定支撑装置正下方,然后通过动物固定支撑装置对非人灵长类实验动物进行固定限制,启动跑步机,然后强迫非人灵长类实验动物在跑步机上行走运动,以训练或测试动物下肢运动能力,获取相关试验数据。又如:一种非人灵长类动物行走试验用跑步机,申请(专利)号为cn202122323249.4,以及一种灵长类实验动物步态分析装置,申请(专利)号为cn201520452485.8;也是采用类似强迫的原理,使用跑步机作为驱动,迫使非人灵长类实验动物运动。采用上述“强迫式”的方法和装置进行测试,会出现如下问题:(1)非人灵长类实验动物对于行走的跑步机跑步带会忐忑不安,尤其将动物限制固定后,其抵抗性表现的更强烈,因此主观性会四处乱窜,期望从跑步带上逃离,因此,难以获得预期的步态效果;(2)非人灵长类实验动物在强制状态下被迫行走,是无法准确、客观地表现出动物真实的步态的,因此,试验结果会不准确且不客观;(3)一般对于非人灵长类实验动物进任何训练或测试,在整个过程中都需要使用食物作为奖励,用以激励和持续训练和测试,这也是“人”与“非人灵长类实验动物”之间“沟通”的关键媒介,确保实验动物的配合,但采用当前的装置和方法在进行食物奖励给予上难以实现或难以便捷给予,这对于整个试验的过程而言无论从持续性还是减少干扰上都是十分不利的。
技术实现要素:
3.本发明针对上述技术问题提供一种使用效果好、试验更准确客观的用于实验动物的关节运动测试系统及测试方法。
4.为实现上述目的,本发明采用如下技术方案:
5.一种用于实验动物的关节运动测试系统,包括行走测试笼、移动给食小车;所述行走测试笼包括笼体,所述笼体包括笼体底面和笼体内侧面,所述笼体底面上开设有若干取食口,所述笼体内侧面为透明面板;所述行走测试笼的下方设有小车行走道,所述小车行走道上可移动分布有所述移动给食小车;所述移动给食小车包括储食室和取食室,所述取食室分布在所述储食室的后下方;所述储食室和所述取食室之间由给食阀门控制食物的下
落;所述储食室的外壳采用透明材质制成;所述取食室设有食物抓取口;所述行走测试笼为环形结构或回形结构。
6.可选的,所述行走测试笼的下方设有走道支撑层,所述走道支撑层上设有行走小车滑轨,所述行走小车滑轨上可移动分布有所述移动给食小车。
7.可选的,还包括监控系统,所述监控系统包括360度旋转摄像头,所述监控系统用于对所述行走测试笼内的实验动物进行及时监控;所述360度旋转摄像头分布在所述笼体的一侧。
8.可选的,所述笼体底面的中部连续设有若干所述取食口;
9.或者
10.所述笼体底面的中部每间距一定距离则开设有一个所述取食口。可选的,所述笼体还包括动物进出口段,所述动物进出口段的笼体底面开设有所述取食口;所述动物进出口段的笼体外侧面开设有动物进出口,所述动物进出口的两侧设有门槽,所述门槽内可活动分布有拉门;所述动物进出口段的左右两侧还各设有滑槽,所述滑槽内可活动分布有挡板。
11.可选的,所述移动给食小车采用手动有线控制方式或手动遥控方式,所述手动有线控制方式或手动遥控方式包括行走速度调节控制、前进和倒退行走控制、暂停行走控制、给食阀门开合控制。
12.可选的,所述储食室的下板呈倾斜结构,所述储食室和所述取食室之间开设有升降板槽,所述给食阀门包括升降板、支撑弹簧、吸引限位铁块和电磁铁;所述升降板槽内可升降分布有所述升降板;所述升降板的下侧中部设有所述吸引限位铁块;所述升降板的下侧两端各设有弹簧固定槽;所述弹簧固定槽内分布有支撑弹簧;所述支撑弹簧的下端设有弹簧座;所述电磁铁分布在所述吸引限位铁块的正下方;所述升降板槽的后方还设有对射光感组件,还包括控制电路,所述对射光感组件和所述电磁铁分别与所述控制电路电性连接;
13.或者
14.所述储食室内固定有自动给食器,所述自动给食器的食物出口与所述取食室连通;所述自动给食器的食物搁置槽的顶盖采用透明材质。可选的,所述移动给食小车还包括感应后尾,所述感应后尾的前端和尾端各设有若干第一光感组件和第二光感组件,所述第一光感组件和所述第二光感组件选择使用可见光感应组件或红外光感应组件。可选的,所述移动给食小车的行走采用自动行走控制系统控制,所述自动行走控制系统包括自动控制电路,所述自动控制电路的信号输入端与第一光感组件和第二光感组件电性连接;所述自动控制电路的信号输出端控制所述移动给食小车的驱动电机的速度。
15.使用如上所述的一种用于实验动物的关节运动测试系统的测试方法,其特征在于,包括如下步骤:
16.s1:将食物装入所述储食室或所述自动给食器的食物搁置槽内;
17.s2:使用摄像设备对全程进行录像;
18.s3:将已经进行禁食或限食控制的实验动物转移至所述笼体内;
19.s4:将所述移动给食小车控制移动至实验动物的前下方,促使实验动物看到所述移动给食小车上的食物;
20.s5:控制所述移动给食小车缓慢行走,通过所述监控系统查看实验动物反应,若实验动物不行走追赶所述移动给食小车,则控制食物下落至取食室内,同时控制所述移动给食小车后退至实验动物前下方,并将所述移动给食小车控制移动至最近的一个所述取食口的下方,待实验动物取食;
21.s6:控制所述移动给食小车缓慢行走,促使实验动物在后方行走追赶,这一行走过程中有如下两种控制方式选择:
22.(1)手动有线控制方式或手动遥控方式,通过所述监控系统查看且及时调控所述移动给食小车的车速以及结合实验动物的反应及时作出在相应的所述取食口的下方暂停、并控制食物下落至取食室内,以便用于奖励实验动物或引导实验动物的配合;
23.(2)自动行走控制系统,待实验动物行走至所述第一光感组件的上方时则将所述第一光感组件的光感信号作出触发信号,控制所述移动给食小车的移动速度提高1个速度单位;待实验动物的头部、身躯全部落在所述第二光感组件的后方时,则将所述第二光感组件的光感信号作出触发信号,控制所述移动给食小车的移动速度减速至设定的最低速度或暂停行走;
24.s7:行走训练或测试结束后则将实验动物引诱至所述动物进出口段,然后将左右两侧的挡板插入,防止实验动物离开所述动物进出口段,然后将转移笼靠近所述动物进出口,然后拉开所述拉门,将实验动物转回动物房。
25.本发明与现有技术相比的有益效果:
26.本发明通过设有环形设计的行走测试笼,然后通过设有可行走的移动给食小车,通过让处于饥饿状态的实验动物看到移动给食小车上的食物,触发实验动物对食物的渴望产生条件反射,并由移动给食小车移动进而带动实验动物“主动性”行走,同时,结合监控系统对实验动物的反应进行及时判断,通过设有取食口易于实验动物顺利获得食物奖励,提高实验动物的持续性配合度。本发明的技术方案相比传统的跑步机“强迫性”训练具有如下优点:(1)诱发/激励造模实验动物进行“主动性”行走,实验动物配合度更高,不会出现恐惧、上蹿下跳等不配合现象,情绪更加稳定,实验动物的行走步态更加客观,进而获取实验动物的及时康复情况更加准确;(2)不会出现类似跑步机测试方式中因为动物恐慌而爆发出不符合当时阶段下造模动物的实际步态,导致误判,更不会因为恐慌乱窜和动物强烈抗拒而造成造模实验动物肢体的新损伤,影响相关实验结果;(3)本技术方案更加贴近人道主义,实验动物在该测试系统下进行的日常训练和测试其接受度更佳,实验动物情绪平稳,利于康复,有利于获得平稳、客观的实验数据;(4)本技术方案的设计构思通过诱发实验动物主动性行走,获得正常、客观的步态,相比传统的“强迫性”行走步态具有明显的进步。
附图说明
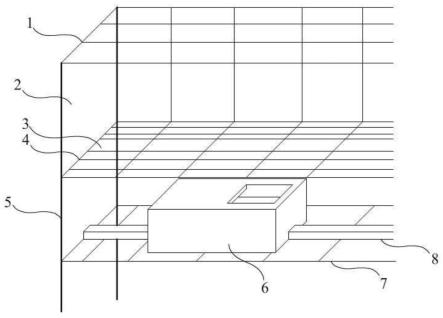
27.图1是本发明行走测试笼的局部结构示意图;
28.图2是本发明行走测试笼的所述取食口另一种布局结构下的局部结构示意图;
29.图3是本发明行走测试笼的的动物进出口段的结构示意图;
30.图4是本发明的移动给食小车的结构示意图;
31.图5是本发明的给食阀门的结构示意图;
32.图6是本发明采用自动给食器的移动给食小车的另一种结构示意图;
33.图7是本发明设有的感应后尾的移动给食小车的另一种结构示意图;
34.图8是本发明设有轨道保护罩下的剖切面结构示意图;
35.图9是本发明的俯视图。
具体实施方式
36.下面结合附图及具体实施方式对本发明进行详细说明:
37.如图1~9所示,一种用于实验动物的关节运动测试系统,包括行走测试笼、移动给食小车6;所述行走测试笼包括笼体1,所述笼体1包括笼体底面4和笼体内侧面2,所述笼体底面4上开设有若干取食口3,所述笼体内侧面2为透明面板,将其设成透明面主要是为了便于观测笼体1内实验动物的情况;所述行走测试笼的下方设有小车行走道,所述小车行走道上可移动分布有所述移动给食小车6;所述移动给食小车6包括储食室11和取食室16,使用电能驱动行走,所述取食室16分布在所述储食室11的后下方;所述储食室11和所述取食室16之间由给食阀门控制食物的下落;所述储食室11的外壳采用透明材质制成,采用透明材料主要是为了确保实验动物能够看到所述储食室11内的食物,进而诱发处于饥饿状态下的实验动物对食物的渴望,在所述移动给食小车6行走移动下,促使实验动物跟随行走,因此,所述储食室11内放置的食物要尽量多且最好是针对每个实验动物放置其最喜欢的食物;所述取食室16设有食物抓取口15。可选的,如图9所示,所述行走测试笼为环形结构或回形结构,这样设计的目的在于确保整个行走周期的循环,当然设成直线形在实验动物走到末端然后再掉头继续回走,循环往复的方式也属于本发明的保护范围,在该处不能理解为环形结构或回形结构等循环的结构设计为必须结构。
38.可选的,所述行走测试笼的下方设有走道支撑层7,本实施例采用若干金属杆焊接成网状即可,这样设计的好处在于,在进行训练或测试时,实验动物是行走在上层的笼体1,实验动物在测试过程中都会有大小便,因此,能够防止排泄物直接滞留在所述走道支撑层7中,妨碍所述移动给食小车的行走且也能够减少臭味,提高位于笼体1内实验动物的舒适性;当然为了便于对实验动物的排泄物进行收集,在所述走道支撑层7的下方还可以设有托盘,当然也可以不设有该托盘,让排泄物直接落入地面,进行然后通过冲洗排入下水道;所述走道支撑层7上设有行走小车滑轨8,所述行走小车滑轨8上可移动分布有所述移动给食小车6。设有的所述行走小车滑轨8主要是为了对行走的所述移动给食小车6进行限位,因此所述行走小车滑轨8的结构直接采用现有的技术即可,比如常见的儿童玩具轨道赛车等,而在所述移动给食小车6的能源供应上,直接使用电池即可,当然也可以采用现有的滑道供电的方式,这类供电技术类似常见的儿童轨道赛车的供电方式,也属于现有技术。但在采用该供电方式下,最好还需要增设有轨道保护罩35,如图8所示,轨道保护罩35沿着行走小车滑轨8分布,剖面呈拱状结构,其下端固定在所述走道支撑层7上;所述移动给食小车6则分布在所述轨道保护罩35内移动,而为了便于实验动物从所述移动给食小车6上取食,则所述轨道保护罩35的顶部也对应开设有若干保护罩取食口36,这样设计的优点在于:能够防止实验动物的排泄物直接落入行走小车滑轨8和所述移动给食小车6上,同时,也便于清洁人员对整个装置的清洗作业,可以直接使用高压水进行冲洗。
39.可选的,还包括监控系统,所述监控系统包括360度旋转摄像头37,所述监控系统用于对所述行走测试笼内的实验动物进行及时监控;所述360度旋转摄像头分布在所述笼
体1的一侧。如图9所示,本实施例的360度旋转摄像头37分布在所述笼体1的内侧,360度旋转摄像头37跟随实验动物的移动而转动,可实现调焦等功能,在使用时,可以通过调焦拉近所述移动给食小车6的图像,促使每次所述移动给食小车6能够对应停在所述取食口3的正下方,便于实验动物取食,当然,在进行给食时,对所述移动给食小车6的停靠控制,还可以使用如下方式:通过在靠近所述取食口3的下方两侧设有光栅感应组件,待所述移动给食小车6的车头驶入,挡住光栅的对射光线,则获取暂停信号,然后控制所述移动给食小车6暂停,即可实现所述移动给食小车6精准停在所述取食口3的正下方,实现实验动物取食,待实验动物取食结束,再次控制所述移动给食小车6启动行走即可,这些控制技术属于常见的成熟的控制技术,在具体控制上最节约成本的成熟控制方式比如直接使用arduino uno电路板,将光栅感应组件作为arduino uno电路板的信号输入端,然后常规控制方式一般是增加续电器,续电器的信号控制端则连接arduino uno电路板的信号输出端,然后续电器的开合接线端则控制所述移动给食小车6电动机的开合,在对所述移动给食小车6的信号控制上,可以直接采用有线控制,或者采用遥控方式进行控制,这些使用现有技术即可实现,不再过多阐述。当然还可以采用如下方案:即通过将光栅感应组件作为开关信号控制光源电路的通断,通过在控制室内查看光源(如led灯)的亮和灭,进而通过人为来控制所述移动给食小车6的暂停,确保所述移动给食小车6停在所述取食口3的正下方附近,也是可以实现所需的控制目的,当然,上述列举的两种具体控制方式只是较简单的常见的控制方式,不排除采用其它现有的控制方式,故只要是能够实现所述移动给食小车6能够准确停在所述取食口3的正下方的所有的现有控制方式都属于本发明的保护范围。
40.可选的,如图1所示,所述笼体底面4的中部连续设有若干所述取食口3;采用该设计结构可以优先配合所述轨道保护罩35来使用,当然也不排除其它组合方式。
41.或者
42.如图2所示,所述笼体底面4的中部每间距一定距离则开设有一个所述取食口3。应当说明的是,本实施例所述的一定距离可以解释为固定的距离或者随机选择的距离。这样设计的目的主要是便于实验动物的行走。
43.可选的,如图3所示,所述笼体1还包括动物进出口段,所述动物进出口段的笼体底面开设有所述取食口3,在该处设有所述取食口3还起到在需要将实验动物转移出来时,促使实验动物停留在该处取食,然后便于挡板9的插入进行限制;同时,起初处于饥饿状态的实验动物也是从该处转入所述笼体1内,在该处开设有所述取食口3对于刚转入所述笼体1内实验动物给予食物,能够吸引实验动物关注到所述移动给食小车6,对于缓解实验动物进入新环境时的紧张情绪,提高实验动物后期的配合度和激发实验动物的食欲有极大帮助。如图3所示,所述动物进出口段的笼体外侧面开设有动物进出口10-1,所述动物进出口10-1的两侧设有门槽,所述门槽内可活动分布有拉门10,设有的拉门10在本技术领域中一般可选上下拉动式或者左右拉动式;所述动物进出口段的左右两侧还各设有滑槽,所述滑槽内可活动分布有挡板9,所述挡板9的作用主要是实现分隔作用,在完成测试后需要将实验动物从所述笼体1内转移出来时,将实验动物引诱至动物进出口段,然后给食,然后插入所述挡板9,将实验动物限制在动物进出口段,然后将转移笼贴近动物进出口10-1,拉开拉门10,将实验动物赶入转移笼中,即可将实验动物转回饲养笼内。在转回饲养笼后,根据相关实验要求,使用猴杆卡住颈圈,将位于饲养笼内的实验动物转移至猴椅上,通过颈圈卡止固定,
然后按要求比如每日三次进行治疗药物灌胃等操作,然后使用本系统进行每日一次或两次的测试或训练,记录所有相关实验数据,完成整个试验周期。
44.可选的,所述移动给食小车6采用手动有线控制方式或手动遥控方式,所述手动有线控制方式或手动遥控方式包括行走速度调节控制、前进和倒退行走控制、暂停行走控制、给食阀门开合控制。这些都属于成熟的现有技术,比如应用在儿童玩具遥控车上的类似技术。可选的,如图4所示,所述储食室11的下板呈倾斜结构,这样利于食物下落,所述储食室11和所述取食室16之间开设有升降板槽25,所述给食阀门包括升降板17、支撑弹簧20、吸引限位铁块19和电磁铁21,其下部对应行走小车滑轨8设有滑槽22,然后滑槽内分布有行走车轮23,所述行走车轮23则由电动机驱动;所述升降板槽25内可升降分布有所述升降板17;所述升降板17的下侧中部设有所述吸引限位铁块19;如图5所示,所述升降板17的下侧两端各设有弹簧固定槽28;所述弹簧固定槽28内分布有支撑弹簧20;所述支撑弹簧20的下端设有弹簧座26,所述支撑弹簧20则固定在弹簧座26顶部的弹簧固定槽27内;所述电磁铁21分布在所述吸引限位铁块的正下方;所述升降板槽的后方还设有对射光感组件,对射光感组件包括光源24和光感元件14,在制备时,可以成排设有几组对射光感组件,或者将图4中对射光感组件的上下方位的分布改成左右侧方位的分布,用于监控是否落下食物,食物一旦落下,被其中一个对射光感组件监控到,则通过设有的控制电路控制所述电磁铁断电,然后在两个支撑弹簧20的弹力作用下,所述升降板17则向上移动,对所述储食室11内的食物进行隔断,防止继续下落至所述取食室16内,所述对射光感组件和所述电磁铁分别与所述控制电路电性连接;本实施例中为提高使用效果,在所述升降板槽25的两侧还设有润滑套18,设有润滑套18能够减少所述升降板17的摆动,以及防止食物粉末落入所述升降板槽25内,在制备时,要加长所述升降板槽25的深度防止摆动,同时依靠设有的两个支撑弹簧20进行挤压支撑,然后依靠所述吸引限位铁块19挤压在所述升降板槽25的下方两侧而实现基本固定,因为所述升降板17主要是受到其自身重力以及食物的水平向作用力,因此,采用上述技术方案已经能够基本保持所述升降板17的稳定了。在本实施例中进行加工时,还需要注意,如图4所示,所述储食室11的顶盖6-1是透明的,同时设有拉门12和拉门槽13,用于放入食物和锁止,然后在所述储食室11和所述取食室16之间的顶部一段6-2最好不设成透明,主要是为了防止有些机灵的实验动物从所述取食室16伸手到所述储食室11内取食。
45.当然在该处还可以直接整合现有的自动给食器29来使用,具体组合方式如下:
46.所述储食室内固定有自动给食器29(现有的用于实验动物尤其是优选非人灵长类实验动物用的自动给食器),所述自动给食器29一般是通过电机驱动转盘,然后转盘上分布有食物,然后转盘上开设有一个食物出口小孔,待转盘转动,食物颗粒随机落入的食物出口小孔则从食物出口下落食物,在食物出口处目前还集成有感应组件,用于监控是否下落食物,一旦食物下落,则停止电机供电,完成一次给食;本实施例中通过设有小管30,用于连接现有自动给食器29的食物出口及所述取食室16;然后需要注意的是,现有的所述自动给食器29的食物搁置槽的顶盖如果不是透明的,则需要将其替换成透明材质的顶盖,目的是为了促使实验动物能够看到食物。
47.可选的,所述食物抓取口15开设有在所述取食室16的顶部,所述取食室16的后侧板31设成倾斜结构。后侧板31设成倾斜结构的目的是便于实验动物在取食,也为防止实验动物将所述移动给食小车6抓取,则在加工制备时,所述取食室16的四个内壁都可以设成倾
斜结构,然后所述取食口3和所述干保护罩取食口36的开口大小可控制在5cm宽度以下,只要确保实验动物能够抓取到食物即可,开口尽量按小口来开设。
48.可选的,有些实施例为了便于自动控制,如图7所示,所述移动给食小车6还包括感应后尾33,所述感应后尾33的前端和尾端各设有若干第一光感组件32和第二光感组件34,所述第一光感组件32和所述第二光感组件34选择使用可见光感应组件或红外光感应组件。在加工制备时,若干第一光感组件32可以成一排横向设计,若干第二光感组件34也成一排横向设计,比如设有3个所述第一光感组件32,3个所述第一光感组件32左右横向成排分布,而第二光感组件34则分布在后侧,多设有几个所述第一光感组件32能够提高灵敏度。
49.可选的,所述移动给食小车6的行走采用自动行走控制系统控制,所述自动行走控制系统包括自动控制电路,所述自动控制电路的信号输入端与所述第一光感组件32和第二光感组件34电性连接;所述自动控制电路的信号输出端控制所述移动给食小车的驱动电机的速度,这类控制技术属于现有常见技术,且应用成熟。在本实施例中,第二光感组件34采用红外传感器,实验动物是跟在所述移动给食小车6的后面行走的,设有第二光感组件34的目的在于,当所述移动给食小车6行走在前,实验动物跟不上而落下了,在所述移动给食小车6继续向前行走时,第二光感组件34的位置远离实验动物的头部,则无法感应到红外光,进而触发开关,促使所述移动给食小车6减速或者暂停,待实验动物追上,追上后再触发启动所述移动给食小车6继续行走,这样可以省掉无需认为观测显示镜头进行手动操作,解放实验技术员的双手。当实验动物对食物过于渴望,而走得太快时,若实验动物的头部到达所述第一光感组件32处,则所述第一光感组件32感应到红外光,触发电路促使所述移动给食小车6,而所述移动给食小车6加速后可以进一步诱导实验动物加快行走步伐,若实验动物跟不上了,则由第二光感组件34进行上述的控制,如此通过所述第一光感组件32和所述第二光感组件34的协同监控实现对所述移动给食小车6的自动化调速,这样能够在实验动物与所述移动给食小车6之间形成你追我赶的形式,有利于提高乐趣以及获得更好和持久的步态。
50.使用如上所述的一种用于实验动物的关节运动测试系统的测试方法,包括如下步骤:
51.s1:将食物装入所述储食室或所述自动给食器的食物搁置槽内;
52.s2:使用摄像设备对全程进行录像;
53.s3:将已经进行禁食或限食控制的实验动物转移至所述笼体内;主要目的在于促使需要测试训练的实验动物处于饥饿状态,进而容易激发实验动物看到食物后的本能反应(应激性反应),促使实验动物追随所述移动给食小车6行走;
54.s4:将所述移动给食小车控制移动至实验动物的前下方,促使实验动物看到所述移动给食小车上的食物;
55.s5:控制所述移动给食小车缓慢行走,通过所述监控系统查看实验动物反应,若实验动物不行走追赶所述移动给食小车,则控制食物下落至取食室内,同时控制所述移动给食小车后退至实验动物前下方,并将所述移动给食小车控制移动至最近的一个所述取食口的下方,待实验动物取食;
56.s6:控制所述移动给食小车缓慢行走,促使实验动物在后方行走追赶,这一行走过程中有如下两种控制方式选择:
57.(1)手动有线控制方式或手动遥控方式,通过所述监控系统查看且及时调控所述移动给食小车的车速以及结合实验动物的反应及时作出在相应的所述取食口的下方暂停、并控制食物下落至取食室内,以便用于奖励实验动物或引导实验动物的配合;
58.(2)自动行走控制系统,待实验动物行走至所述第一光感组件的上方时则将所述第一光感组件的光感信号作出触发信号,控制所述移动给食小车的移动速度提高1个速度单位;待实验动物的头部、身躯全部落在所述第二光感组件的后方时,则将所述第二光感组件的光感信号作出触发信号,控制所述移动给食小车的移动速度减速至设定的最低速度或暂停行走;
59.s7:行走训练或测试结束后则将实验动物引诱至所述动物进出口段,然后将左右两侧的挡板插入,防止实验动物离开所述动物进出口段,然后将转移笼靠近所述动物进出口,然后拉开所述拉门,将实验动物转回动物房。
60.以上内容是结合具体实施方式对本专利所作的详细说明,不能认定本专利的具体实施方式只局限于上述说明。对于本专利所属技术领域的普通技术人员来说,在不脱离本专利构思的前提下,对上述已描述的实施方式做出的若干替代或变型,都应视为属于本专利的保护范围。在本说明书的描述中,在本说明书中,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1