一种柑橘园智能除草机
1.本发明涉及农用机械技术领域,尤其涉及一种柑橘园智能除草机。
背景技术:
2.柑橘种植业作为三峡库区农民主导性产业,关系着库区百姓的农业经济。近几年,随集约化种植面积增多,规模化生产成为主流趋势。但是在这种生产模式下依旧存在很多问题。其中,因杂草引起的生态问题严重制约着区域生态经济的发展。同时,优势性杂草在反复施用杀草剂后产生适应性进化,出现“疯长”态势,甚至产生杂草-杀草剂恶性循环现象。这不仅影响柑橘生产,同时增加杀草剂使用频率,更会加重果园面源污染,影响绿色高质量柑橘园发展。为此,亟需通过物理手段进行防治。
3.然而,杂草不能净除,需保持一定地表覆盖,以达到防治水土流失和吸收面源污染的效果。因此,柑橘园杂草防治可通过控制杂草高度,将切割部分打碎作为绿肥还田,增加地表覆盖度,并提高土壤有机质。
4.目前,市场上已有大量除草机械,这些除草机按行进方式可以分为智能化半自动式、拖行式、后推行式、坐骑式、拖拉机悬挂式。但这些除草机均需要人工辅助推动操作才能完成割草,割草人员的工作量依然很大的,效率非常低下。不仅如此,传统果园除草机未曾考虑杂草对地表覆盖及其对土壤生态修复的作用,这对于生态化、科学化管理果园存在极大的制约性。同时,柑橘园种植地形起伏较大,果树往往种植在垄上,这就要求这种设备既要在起伏的地形中调整姿态行进,也要剪割固定高度杂草。
5.因此,为达到以上除草效果,促进柑橘园绿色高质量的发展,亟需开发机械化除草技术及仪器。
技术实现要素:
6.有鉴于此,本发明的目的是提供一种柑橘园智能除草机,使柑橘园的除草过程无需人工干预,实现柑橘园除草的机械化、智能化,提高除草效率。
7.本发明通过以下技术手段解决上述技术问题:
8.一种柑橘园智能除草机,包括定位系统、路径分析系统、电源装置(动力源)、车轮驱动装置、多传感器信息采集模块、视觉模块、中央处理器、可调节式轴向切割装置、杂草压整装置和杂草传输装置,电源装置用于给车轮驱动装置、多传感器信息采集模块、视觉模块、中央处理器、可调节式轴向切割装置、杂草压整装置和杂草传输装置,中央处理器通过接收和解算多传感器信息采集模块与视觉模块的信息控制车轮驱动装置、可调节式轴向切割装置、杂草压整装置及杂草传输装置运转。
9.定位系统,用于获取除草机位置,便于寻找仪器、分析并选择路径;
10.路径分析系统,用于实现处理上的最佳路;
11.动力装置,为蓄电池、太阳能板等复合动力装置,
12.中央处理器由arm处理器和fpga构成,arm处理器用于完成除草机的姿态解算和控
制算法功能;fpga与视觉模块连接,用于将图像信息发送给fpga,fpga根据图像信息识别柑橘园中的障碍物和杂草信息,并将障碍物和杂草的信息传递给arm处理器,arm处理器解算出障碍物和杂草相对除草机的位置,用于引导除草机避开障碍物以及对杂草进行切割;
13.多传感器信息采集模块包括陀螺仪传感器、加速度传感器和磁场传感器,陀螺仪传感器、加速度传感器获取除草机的角速度和加速度,用于确定除草机的姿态;磁场传感器用于获取除草机行程数据,测量除草机相对磁场的运动方向;
14.车轮驱动装置用于驱动除草机驱动轮的运转和除草机的转向;
15.可调节式轴向切割装置包括微波振荡器、波导聚焦机构和可伸缩式轴,微波振荡器用于产生微波,微波穿透杂草并对其局部进行内外同时加热,通过热应力使被加热杂草断裂;波导聚焦机构用于缩小微波输出端的垂直宽度、增大微波输出端的水平宽度;可伸缩式轴用于调节微波振荡器的位置,进而调节微波的高度;
16.杂草压整装置用于将除草机前部切割断裂的杂草部分进行压平处理;
17.杂草传输装置用于将除草机前部切割断裂的杂草部分传输至杂草压整装置进行压平处理,并将压平处理后的杂草传输至除草机尾部还田。
18.进一步,还包括可伸缩式限深装置,用于控制除草机各个驱动轮的分别上下伸缩,以便于在沟渠内控制除草机稳定,更加适用于柑橘园中的地形环境。
19.进一步,还包括外置存储模块、gps接收模块和接收机模块;
20.外置存储模块,用于保存除草机运行过程中的姿态和位置信息,方便离线分析除草机运作数据,调整参数;
21.gps接收模块,用于将测量数据发送给arm处理器,arm处理器进行解算确定除草机的位置信息和速度信息;
22.接收机模块,用于在人工模式下接收遥控器的命令,通知除草机完成命令对应的动作。
23.进一步,还包括平铺装置,用于整齐平铺杂草传输装置传输至除草机尾部还田的压平处理后的杂草。通过平铺装置可以将还田的杂草整齐平铺在地面,进一步降低地表蒸发,保证果园水分需求。
24.进一步,电源装置采用柴油发电机、汽油发电机或者电池包中的一种。
25.进一步,波导聚焦机构采用渐变的方式将微波输出端的垂直宽度缩小至5mm的范围内。将微波束输出端的垂直宽度缩小至5mm的范围内,使微波束更加聚焦,能够提高微波的热应力,使杂草的切割效率更高。
26.本发明的有益效果:
27.1、本发明能够实现柑橘园除草的机械化、智能化,能够控制柑橘果园杂草的高度,并将杂草切割物经机器压实后以绿肥的形式返还田间,有效地增加了土壤湿度,减少了水土流失造成的环境污染,降低了地表蒸发,保证了果园水分需求,提高了作业效率,降低劳动成本,保证地面吸收源污染的能力。
28.2、本发明采用微波穿透杂草并对其局部进行内外同时加热,通过热应力使被加热杂草断裂的方式进行杂草的切割,工作效率高,噪声污染小,且杂草加热断裂的缺口能够阻止杂草的生长,减缓杂草的生长速度,延长除草周期。
附图说明
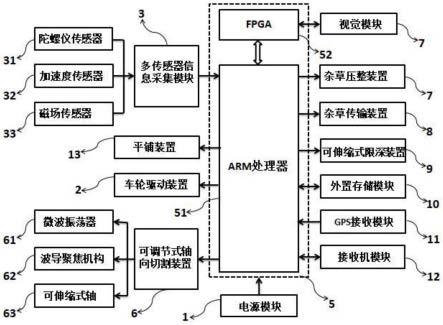
29.图1是本发明柑橘园智能除草机的原理框图;
30.图2是本发明柑橘园智能除草机的结构示意图;
31.其中,电源装置1、车轮驱动装置2、多传感器信息采集模块3、陀螺仪传感器31、加速度传感器32、磁场传感器33、视觉模块4、中央处理器5、arm处理器51、fpga52、可调节式轴向切割装置6、微波振荡器61、波导聚焦机构62、可伸缩式轴63、杂草压整装置7、进料铲斗71、杂草传输装置8、可伸缩式限深装置9、外置存储模块10、gps接收模块11、接收机模块12、平铺装置13。
具体实施方式
32.以下将结合实施例对本发明进行详细说明:
33.如图1所示
34.一种柑橘园智能除草机,包括电源装置1、车轮驱动装置2、多传感器信息采集模块3、视觉模块4、中央处理器5、可调节式轴向切割装置6、杂草压整装置7和杂草传输装置8,电源装置1用于给车轮驱动装置2、多传感器信息采集模块3、视觉模块4、中央处理器5、可调节式轴向切割装置6、杂草压整装置7和杂草传输装置8供电,中央处理器5通过接收和解算多传感器信息采集模块3与视觉模块4的信息控制车轮驱动装置2、可调节式轴向切割装置6、杂草压整装置7及杂草传输装置8运转;
35.中央处理器5由arm处理器51和fpga52构成,arm处理器51用于完成除草机的姿态解算和控制算法功能;fpga52与视觉模块4连接,用于将图像信息发送给fpga52,fpga52根据图像信息识别柑橘园中的障碍物和杂草信息,并将障碍物和杂草的信息传递给arm处理器51,arm处理器51解算出障碍物和杂草相对除草机的位置,用于引导除草机避开障碍物以及对杂草进行切割;
36.多传感器信息采集模块3包括陀螺仪传感器31、加速度传感器32和磁场传感器33,陀螺仪传感器31、加速度传感器32获取除草机的角速度和加速度,用于确定除草机的姿态;磁场传感器33用于获取除草机行程数据,测量除草机相对磁场的运动方向;
37.车轮驱动装置2用于驱动除草机驱动轮的运转和除草机的转向;
38.可调节式轴向切割装置6包括微波振荡器61、波导聚焦机构62和可伸缩式轴63,微波振荡器61用于产生微波,微波穿透杂草并对其局部进行内外同时加热,通过热应力使被加热杂草断裂;波导聚焦机构62用于缩小微波输出端的垂直宽度、增大微波输出端的水平宽度;可伸缩式轴63用于调节微波振荡器的位置,进而调节微波的高度;
39.如图2所示,杂草压整装置7用于将除草机前部切割断裂的杂草部分进行压平处理,本示例中,杂草压整装置7包括设置于微波振荡器61上方用于接取部分被微波切断的杂草的进料铲斗71和滚压机构,进料铲斗71内接取的杂草随着除草机的移动的滑落于杂草传输装置8上,通过杂草传输装置8用于将杂草部分传输至滚压机构,由滚压机构将杂草滚压成草饼后掉落于平铺装置13内,最后草饼经平铺装置13滑落至除草机尾端进行还田平铺,进一步降低地表蒸发,保证果园水分需求滑落至除草机尾部平铺在地面上。
40.还包括可伸缩式限深装置9,用于控制除草机各个驱动轮的分别上下伸缩,以便于在沟渠内控制除草机稳定,更加适用于柑橘园中的地形环境。
41.还包括外置存储模块10、gps接收模块11和接收机模块12;
42.外置存储模块10,用于保存除草机运行过程中的姿态和位置信息,方便离线分析除草机运作数据,调整参数;
43.gps接收模块11,用于将测量数据发送给arm处理器51,arm处理器51进行解算确定除草机的位置信息和速度信息;
44.接收机模块12,用于在人工模式下接收遥控器的命令,通知除草机完成命令对应的动作。
45.电源装置1采用柴油发电机、汽油发电机或者电池包中的一种。
46.波导聚焦机构62采用渐变的方式将微波输出端的垂直宽度缩小至5mm的范围内。将微波束输出端的垂直宽度缩小至5mm的范围内,使微波束更加聚焦,能够提高微波的热应力,使杂草的切割效率更高。
47.以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。本发明未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1