基于图像识别的高效水果采摘装置
1.本发明属于水果采摘装置相关技术领域,具体涉及基于图像识别的高效水果采摘装置。
背景技术:
2.我国是世界水果生产大国,也是水果出口大国,种植规模大,果树总面积和水果总产量居世界首位;而我国很多地区在水果的采摘上依然主要靠人工,且面积较大的果园,果农无法知道每颗果树果实的成熟情况,从而在采摘的过程中,需要果农仔细观察,这样不仅效率低,而且水果成品质量还得不到保障。
技术实现要素:
3.本发明的目的在于提供基于图像识别的高效水果采摘装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:基于图像识别的高效水果采摘装置,包括防脱槽滑轨和遥控车,所述防脱槽滑轨安装在多个果树的周围,所述防脱槽滑轨的底部设有多个用于果树空间坐标建立的第一接近传感器,所述遥控车的下部分在防脱槽滑轨的内部行走,且遥控车的顶部伸出防脱槽滑轨的上表面,所述遥控车的底部安装有第二接近传感器,并与防脱槽滑轨底部的多个第一接近传感器完成空间坐标建立启/停工作,方便遥控车在防脱槽滑轨上,绕果树建立空间坐标,所述遥控车的上表面安装有剪式升降机,所述剪式升降机的上表面按照从后往前的顺序分别安装有高清监控摄像机、收集篮、天线和机械臂,且高清监控摄像机的上表面安装有激光测距传感器,并通过激光测距传感器、高清监控摄像机、第一接近传感器、第二接近传感器和遥控车,完成果树上每个果实的空间坐标的建立。
5.优选的,所述遥控车还包括其内部的无线控制器、蓄电池、gps定位器和通信模块,无线控制器分别与激光测距传感器、剪式升降机、高清监控摄像机、机械臂、遥控车、第二接近传感器电性连接,无线控制器安装在蓄电池上表面,且蓄电池与无线控制器电连接,通信模块和gps定位器均安装在无线控制器上,且通信模块和gps定位器均与无线控制器电性连接,天线通过数据线与通信模块电性连接。
6.优选的,所述防脱槽滑轨底部的多个第一接近传感器与每个果树形成一个整体,实现每个果树的空间坐标建立的启/停功能,且第一接近传感器为空间坐标的原点。
7.优选的,所述激光测距传感器始终面向果树。
8.优选的,所述高清监控摄像机始终面向果树,所述高清监控摄像机的镜片贴有防护薄膜。
9.优选的,所述收集篮的内壁设有防护软垫,所述收集篮的外壁涂有防氧化漆层结构。
10.优选的,所述剪式升降机的高度范围为1m-10m,所述剪式升降机的外壁涂有绝缘
耐氧化漆层。
11.优选的,所述机械臂的长度范围为1.5m-10m,所述机械臂的角度范围为0
°‑
180
°
。
12.与现有技术相比,本发明提供了基于图像识别的高效水果采摘装置,具备以下有益效果:
13.1、本发明通过支撑托板、机械臂、收集篮、天线、第一接近传感器、第二接近传感器、防脱槽滑轨、激光测距传感器、遥控车、剪式升降机、高清监控摄像机的相互配合,不仅可以实现整个果园的图像识别的工作,判断果实是否成熟,也实现了单颗果树的定位工作,使得其他高效水果采摘装置可以根据自身电量到指定的果树完成采摘工作,从而实现机械化和智能化的采摘工作,提高工作效率,也节约了电力资源;
14.2、本发明通过多个第一接近传感器以及第二接近传感器的相互配合,使得水果采摘装置可以对每个果树建立空间坐标,也可以对每个果树上的果实建立空间坐标点,从而使得机械臂可以精确的进行采摘工作。
附图说明
15.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
16.图1为本发明提出的基于图像识别的高效水果采摘装置结构示意图;
17.图2为遥控车的左视结构示意图;
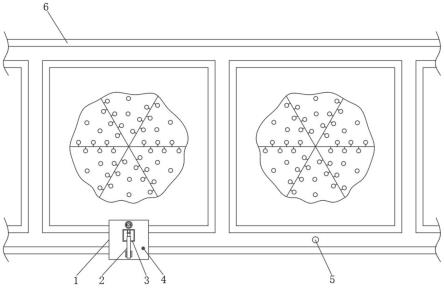
18.图3为果树空间坐标的立体展示图;
19.图4为高效水果采摘装置的控制原理结构示意图。
20.图中:1、支撑托板;2、机械臂;3、收集篮;4、天线;5、第一接近传感器;51、第二接近传感器;6、防脱槽滑轨;7、激光测距传感器;8、遥控车;9、剪式升降机;10、高清监控摄像机。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.请参阅图1-3,本发明提供一种技术方案:基于图像识别的高效水果采摘装置,包括防脱槽滑轨6和遥控车8,防脱槽滑轨6安装在多个果树的周围,防脱槽滑轨6的底部设有多个用于果树空间坐标建立的第一接近传感器5,遥控车8的下部分在防脱槽滑轨6的内部行走,且遥控车8的顶部伸出防脱槽滑轨6的上表面,遥控车8的底部安装有第二接近传感器51,并与防脱槽滑轨6底部的多个第一接近传感器5完成空间坐标建立启/停工作,方便遥控车8在防脱槽滑轨6上,绕果树建立空间坐标,遥控车8的上表面安装有剪式升降机9,剪式升降机9的上表面按照从后往前的顺序分别安装有高清监控摄像机10、收集篮3、天线4和机械臂2,且高清监控摄像机10的上表面安装有激光测距传感器7,并通过激光测距传感器7、高清监控摄像机10、第一接近传感器5、第二接近传感器51和遥控车8,完成果树上每个果实的空间坐标的建立。
23.为了进行无线控制工作,遥控车8还包括其内部的无线控制器、蓄电池、gps定位器
和通信模块,无线控制器分别与激光测距传感器7、剪式升降机9、高清监控摄像机10、机械臂2、遥控车8、第二接近传感器51电性连接,无线控制器安装在蓄电池上表面,且蓄电池与无线控制器电连接,通信模块和gps定位器均安装在无线控制器上,且通信模块和gps定位器均与无线控制器电性连接,天线4通过数据线与通信模块电性连接,通过遥控车8,可以更好地进行移动工作,同时也为了提供电源和进行无线控制工作。
24.根据图1所展示,防脱槽滑轨6底部的多个第一接近传感器5与每个果树形成一个整体,实现每个果树的空间坐标建立的启/停功能,且第一接近传感器5为空间坐标的原点。
25.根据图1所展示,激光测距传感器7始终面向果树,可以测量水果采摘装置与果树树干之间的距离以及果实与水果采摘装置之间的距离,从而实现精确定位工作,方便水果采摘装置可以在精确的定位点进行采摘工作。
26.根据图1所展示,高清监控摄像机10始终面向果树,高清监控摄像机10的镜片贴有防护薄膜,通过高清监控摄像机10,可以清晰的拍摄果实的图像,从而方便果农判断果实的成熟情况。
27.为了进行收集工作,收集篮3的内壁设有防护软垫,收集篮3的外壁涂有防氧化漆层结构,通过收集篮3,可以更好地收集储存果实,同时在收集果实的过程中,也可以进行防护工作。
28.为了进行高度调节工作,剪式升降机9的高度范围为1m-10m,剪式升降机9的外壁涂有绝缘耐氧化漆层,通过剪式升降机9,可以更好地进行高度调节工作,使得机械臂2可以更好地进行采摘工作。
29.为了更好地进行采摘工作,机械臂2的长度范围为1.5m-10m,机械臂2的角度范围为0
°‑
180
°
,通过机械臂2,可以更好地进行长度调节工作、高度调节工作和角度调节工作,从而就可以更好地进行采摘工作。
30.本发明的工作原理及使用流程:在使用的时候,果农先开启电量充足的水果采摘装置中的蓄电池的开关按钮,就会使得无线控制器接通电源,然后,果农先将控制终端与天线4通信连接,随后,果农通过对控制终端进行操作,就会发出信号,在天线4接收到信号之后,就会将信号输入至通信模块内部,并通过通信模块完成数据转换工作,在完成数据转换工作之后,就可以将转换的数据输入至无线控制器内部,此时,无线控制器就会先后控制遥控车8、遥控车8底部的第二接近传感器51、激光测距传感器7、剪式升降机9、高清监控摄像机10、gps定位器工作;
31.遥控车8工作的时候,就会在防脱槽滑轨6内部移动,当遥控车8底部的第二接近传感器51第一次与防脱槽滑轨6底部的多个第一第一接近传感器5的产生感应的时候,就开始启动对每个果树的空间坐标的建立,并且以每个果树对应的第一接近传感器5为原点,同时,激光测距传感器7和高清监控摄像机10工作的时候,可以测量水果采摘装置与每个果树之间的距离,以及果实与水果采摘装置之间的距离,从而实现每个果实的空间坐标点的建立,另外,在整个定位的过程中,高清监控摄像机10可以进行图像识别工作,并且识别图像数据就会通过无线控制器、通信模块完成数据分析和转换工作,而转换后的数据就会通过天线4发送至控制终端,并通过控制终端的显示器展示出来,从而方便果农判断果实是否成熟,也可以储存数据,而为了更好对整个果园完成测定工作,当遥控车8底部的第二接近传感器51第二次与对应与防脱槽滑轨6底部的多个第一第一接近传感器5的产生感应的时候,
就可以完成每个果树以及每个果树上的果实的空间坐标的构建;
32.在完成所有的果树以及果实的空间坐标构建之后,果农按照上述步骤在将其他高效水果采摘装置与控制终端进行通信连接工作,并且根据水果采摘装置的自身电量,就可以将其他的水果采摘装置遥控到指定的果树位置处,并且通过对控制终端进行操作,使得对应的水果采摘装置中的遥控车8移动到指定果树位置处,此时通过遥控车8、遥控车8底部的第二接近传感器51、多个第一接近传感器5、激光测距传感器7、剪式升降机9、高清监控摄像机10的相互配合,可以精确的完成果实采摘工作,从而就可以实现机械化和智能化的采摘工作,提高工作效率,也节约了电力资源,当所有的水果采摘装置完成多点的采摘工作之后,果农就可以通过控制终端控制所有的水果采摘装置回到初始位置处。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1