一种利用贴接法的整排并行式穴盘苗嫁接机
1.本发明涉及穴盘苗整盘嫁接技术领域,具体是一种利用贴接法的对6x12穴盘的砧木苗、接穗苗切割及嫁接装置。
背景技术:
2.嫁接,也就是无性繁殖中的营养生殖的一种,接上去的枝或芽叫做接穗,被接的植物体叫做砧木或台木。利用嫁接可以增强植株抗病能力、植株耐低温能力、有利于克服连作危害、扩大了根系吸收范围和能力并提高产量。常见的嫁接方式有靠接法、插接法、劈接法、套接法等。目前我国的嫁接机研究主要集中在高校,发展较迟。现在的嫁接机多采用单株苗木嫁接,效率较低,且大多未能实现全自动。
技术实现要素:
3.本发明的目的是克服上述背景技术中的不足,提供一种提高嫁接效率的全自动整排并行式穴盘苗嫁接机。
4.本发明提供的技术方案是:
5.一种全自动整排并行式穴盘苗嫁接机,包括机架,其特征在于:该机架上设置有并排设置有用于分别输送砧木苗盘的砧木苗输送机构与输送接穗苗盘的接穗苗输送机构、用于分别夹持砧木苗的砧木苗夹取机构与夹持接穗苗的接穗苗夹取机构、用于整排切削接穗苗的接穗苗斜切机构、用于固定砧木与接穗苗的供夹机构以及用于分别移动砧木苗夹取机构的砧木夹取移动机构与移动接穗苗夹取机构的接穗苗夹取移动机构;还包括用于整盘切削砧木苗的砧木苗斜切机构以及分别用于砧木苗拢苗的砧木拢苗机构与接穗苗拢苗的接穗拢苗机构。
6.各机构沿着y方向依次布置的位置是:并排排列的砧木夹取机构与砧木拢苗机构;并排排列的砧木苗输送机构、接穗夹取机构以及供夹机构;砧木苗斜切机构;并排排列的接穗苗输送机构以及接穗苗斜切机构;接穗拢苗机构;其中,砧木夹取机构及砧木拢苗机构,与砧木苗输送机构、砧木苗斜切机构、接穗苗输送机构以及接穗拢苗机构的水平投影平面为一字形排列。
7.所述砧木苗输送机构与所述接穗苗输送机构结构相同,均包括输送平台、可绕转动地定位在输送机构平台两端的主动辊与从动辊、与主动辊和从动辊配合的输送带以及通过传动单元驱动主动辊转动的输送电机;传动单元包括固定在主动辊一端的大链轮、固定在输送电机转轴上的小链轮以及连接大链轮与小链轮的输送链条。
8.所述砧木拢苗机构和所述接穗拢苗的结构相同,均包括水平固定在机架上的拢苗平台、固定在拢苗平台上的第二无杆气缸、相互平行地设置在拢苗平台上且分别配有第四滑块的两个第四滑轨、同时固定在两个第四滑块上和第二无杆气缸滑块上且由第二无杆气缸驱动的拢苗架、固定在拢苗架上的第五滑轨、固定在第五滑轨上并且相互保持间距的五个第五滑块、固定在五个第五滑块上并且由拢苗气缸驱动的上拢苗杆连接板、固定在上拢
苗杆连接板上的上拢苗杆、固定在拢苗架上的下拢苗杆和拢苗气缸、固定在上拢苗杆连接板上并且和拢苗气缸的气缸杆连接的气缸连接件。
9.所述砧木斜切机构包括水平定位在机架上的切削平台、相互平行地设置在切削平台上且分别配有第六滑块的两个第六滑轨、固定在切削平台上且位于两个滑轨之间的第三无杆气缸、同时固定在两个第六滑块上和第三无杆气缸滑块上并且由无杆气缸驱动的取苗杆座、相互平行布置且后端固定在取苗杆座上的的十二个砧木切削刀杆以及分别固定在砧木切削刀杆前端并且相对于水平面倾斜角度的十二个刀头。
10.所述砧木夹取机构包括水平布置的夹苗平台、相互平行地水平设置在取苗平台上且分别配有第一滑块的两个第一滑轨、固定在夹苗平台上且位于两个第一滑轨的第一无杆气缸、同时固定在两个第一滑块上和第一无杆气缸滑块上并且由第一无杆气缸驱动的取苗杆座、固定在取苗杆座上且配有的五个第二滑块的第二滑轨、固定在五个滑块上且可沿着滑轨移动的上拢苗杆连接板、固定在上拢苗杆连接板上的上取苗杆、固定在取苗杆座上的下取苗杆、固定在取苗杆座上的第一夹取气缸、固定在上拢苗杆连接板上并且与取苗气缸的气缸杆连接的气缸连接件;每个上取苗杆均与一个下取苗杆相互平行地配对设置且可相互靠近,以用于夹持砧木苗。
11.砧木夹取移动机构中的丝杆传动机构,包括相互平行并且分别配有第十滑块的两个第十滑轨、固定在两个第十滑块上且固定着第一夹取传感器和第二夹取传感器的第八滑轨座、固定在第八滑轨座上的第八滑轨、固定在第八滑轨座上且与第八滑块螺纹配合的第一y向丝杆以及驱动第一y向丝杆的电机、与第一y向丝杆螺纹配合并且可以沿着第八滑轨在y方向移动的三个第八滑块、分别固定在第八滑块上的第二z向气缸和两个第九滑轨、分别与两个第九滑轨滑动配合的两个第九滑块;第一x向气缸通过气缸安装板固定在机架上,气缸杆则与第八滑轨座上相连接。
12.所述接穗夹取机构包括水平固定在第三z向气缸上的取苗平台、水平固定在取苗平台上且配有第三滑块的第三滑轨、通过与第三滑块连接的上取苗爪连接板可移动地定位在第三滑轨上的若干个上取苗爪、间隔距离排列并且固定在取苗平台上的若干个下取苗爪、固定在取苗平台上的第二夹取气缸、固定在上取苗爪连接板上并且和第二夹取气缸连接的第二气缸连接件;每个上取苗爪均与一个下取苗爪相互平行地配对设置且可相互靠近,以用于夹持接穗苗。
13.所述接穗夹取移动机构包括相互平行地水平固定在机架上并且间隔距离的两个x向丝杆传动机构、由两个x向丝杆传动机构带动的y向丝杆传动机构、由y向丝杆传动机构带动的第三z向气缸;每个x向丝杆传动机构包括一个通过x向导轨座固定在机架上且配有x向滑块的x向导轨、可转动地定位在x向导轨座上且可与x向滑块螺纹配合的x向丝杆以及与x向导轨座固定且与所述x向丝杆动力连接的x向丝杆电机;每个y向丝杆传动机构包括一个通过y向导轨座与两个x向滑块固定且配有y向滑块的y向导轨、通过轴承可转动地定位在y向导轨座上且可与y向滑块螺纹配合的第二y向丝杆以及与y向导轨座固定且与所述第二y向丝杆动力连接的y向丝杆电机;第三z向气缸固定在y向滑块上,其气缸杆与所述取苗平台固定连接。
14.所述接穗斜切机构包括水平固定在机架上的接穗切削平台、固定在切削平台上的第四无杆气缸、相互平行地固定在切削平台上且分别配有第七滑块的两个第七滑轨、同时
固定在两个第七滑块上和第四无杆气缸滑块上并且由无杆气缸驱动的接穗苗座、相互平行布置且后端固定在接穗苗座上的六个接穗切削刀杆以及一一固定在接穗切削刀杆前端并且相对于水平面倾斜角度的六个刀片。
15.本发明的工作原理是:
16.将砧木苗盘和接穗苗盘分别放到砧木苗输送机构和接穗苗输送机构,两个苗盘移动到输送第一传感器位置时停止(两个苗盘处在同一直线上);两个拢苗机构分别同时对砧木苗和接穗苗进行拢苗动作,即所有的拢苗杆往前运动(与苗盘的运动方向垂直),成对的两个拢苗杆叉住一排苗,使苗处于直立状态,方便后续的切削和夹取。
17.接着,砧木夹取机构移动(移动方向与苗盘的运动方向垂直)到夹取位置(砧木苗盘的后侧),夹取手在第一无杆气缸作用下伸出(伸出方向与苗盘的运动方向平行),在第一夹取气缸作用下,成对的两个取苗杆夹住(每个苗的夹苗位置高于拢苗位置)一排苗,完成夹苗;然后,砧木斜切机构刀头在气缸作用下伸出(伸出方向与苗盘的运动方向垂直),完成对砧木苗盘全盘切削(每个苗的切削部位位于取苗杆与拢苗杆之间);切削完成后,砧木夹取机构将切除下来的砧木苗夹取到机架外,完成弃苗动作。
18.随后,砧木拢苗机构、第一斜切机构复位的同时,砧木苗盘继续前进移动到嫁接位置;拢苗机构的拢苗杆往前运动(运动方向与苗盘的运动方向垂直),对接穗苗进行拢苗;接穗苗完成拢苗后,接穗夹取机构移动(运动方向与苗盘的运动方向垂直)到夹取位置,取苗爪在第二夹取气缸作用下将第一排的接穗苗夹住;而后,接穗斜切机构刀头在气缸作用下伸出,完成对第一排接穗苗的整排切削(切削后的接穗苗仍旧由接穗夹取机构夹持着);接穗夹取机构将切下来的接穗苗移动到砧木苗盘的最前排的穴盘上方,并将接穗苗与砧木上下对准;供夹机构调整位置后推出嫁接夹将砧木和接穗苗夹取固定(夹取固定方式为现有技术)。然后,为进行后一排的嫁接,供夹机构上升并且砧木苗盘往前移动一个穴孔的距离,接穗夹取机构和接穗斜切机构继续进行第二排的夹取和切削,供夹机构与夹取机构再移动到第二排的穴盘上方进行嫁接;依次进行以上循环嫁接步骤,直至完成整盘苗的嫁接工作。
19.本发明有益效果:
20.与现有技术相比,本发明采用穴盘上的整盘砧木苗和接穗苗,并且嫁接苗也以穴盘为单位,自动整盘下苗;进行整排并行式嫁接,一次循环作业同时嫁接6株嫁接苗,可自动完成砧木上苗、砧木切削、砧木生长点切除、接穗上苗、接穗切削、砧木和接穗对接作业。本发明自动化程度高、作业劳动强度小、嫁接作业生产率高、作业准确性好、嫁接作业质量稳定、装置作业可靠性高。
附图说明
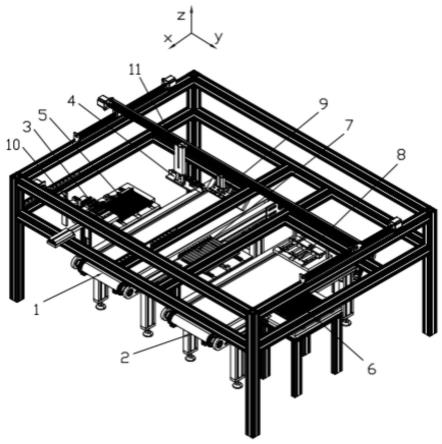
21.图1.1为本发明实施例的立体结构示意图。
22.图1.2为本发明实施例的主视结构示意图。
23.图1.3为本发明实施例的左视结构示意图。
24.图1.4为本发明实施例的俯视结构示意图。
25.图2.1为本发明实施例中砧木苗输送机构的立体结构示意图。
26.图2.2为本发明实施例中砧木苗输送机构的左视结构示意图。
27.图3.1为本发明实施例中砧木夹取机构的立体结构示意图之一。
28.图3.2为本发明实施例中砧木夹取机构的俯视结构示意图。
29.图3.3为本发明实施例中砧木夹取机构的俯视结构示意图之二。
30.图4为本发明实施例中接穗夹取机构的立体结构示意图。
31.图5.1为本发明实施例中拢苗机构主视结构示意图(俯视状态)。
32.图5.2为本发明实施例中拢苗机构立体结构示意图之一(工作状态之一)。
33.图5.3为本发明实施例中拢苗机构立体结构示意图之二(工作状态之二)。
34.图6.1为本发明实施例中砧木苗斜切机构的立体结构示意图。
35.图6.2为本发明实施例中砧木苗斜切机构的工作状态示意图。
36.图7.1为本发明实施例中接穗苗斜切机构的立体结构示意图。
37.图7.2为本发明实施例中接穗苗斜切机构的工作状态示意图。
38.图8.1为本发明实施例中供夹机构的立体结构示意图。
39.图8.2为本发明实施例中供夹机构的俯视结构示意图。
40.图8.3为本发明实施例中供夹机构的左视结构示意图。
41.图9为本发明实施例中第一z向气缸的立体结构示意图。
42.图10.1为本发明实施例中砧木夹取移动机构的立体结构示意图。
43.图10.2为本发明实施例中砧木夹取移动机构的主视结构示意图。
44.图11为本发明实施例中接穗夹取移动机构的立体结构示意图。
45.图中标号:
46.1、砧木苗输送机构;1-1、砧木苗输送平台;1-2、主动辊;1-3、从动辊;1-4输送带;1-5、输送电机;1-6、输送电机安装板;1-7、小链轮;1-8、大链轮;1-9、链条;1-10、第一输送传感器;1-11、第二输送传感器;
47.2、接穗苗输送机构;
48.3、砧木夹取机构;3-1-1、上取苗杆;3-1-2、下取苗杆;3-2、第一滑轨;3-3、第一无杆气缸;3-4、第一夹取气缸;3-5、第一气缸连接件;3-6、取苗杆座;3-7、夹苗平台;3-8、第一滑块;3-9、第二滑轨;3-10、第二滑块;3-11、上拢苗杆连接板;
49.4、接穗夹取机构;4-1、取苗平台;4-2、第二夹取气缸;4-3-1、上取苗爪;4-3-2、下取苗爪;4-4、第二气缸连接件;4-5、第三滑块;4-6、第三滑轨;4-7、上取苗爪连接板;
50.5、砧木拢苗机构;5-1、拢苗平台;5-2-1、上拢苗杆;5-2-2、下拢苗杆;5-3、第四滑轨;5-4、第二无杆气缸;5-5、气缸连接板;5-6、拢苗气缸;5-7、上拢苗杆连接板;5-8、第四滑块;5-9、第二无杆气缸滑块;5-10、拢苗杆座;5-11、第五滑轨;5-12、第五滑块;
51.6、接穗拢苗机构;
52.7、砧木苗斜切机构;7-1、砧木切削平台;7-2、砧木刀片;7-3、砧木切削刀杆;7-4、第六滑轨;7-5、第三无杆气缸;7-6、取苗杆座;7-7第六滑块;7-8、第三无杆气缸滑块;
53.8、接穗苗斜切机构;8-1、接穗切削平台;8-2、接穗刀片;8-3、接穗切削刀杆;8-4、第七滑轨;8-5、第四无杆气缸;8-6、接穗苗座;8-7第七滑块;
54.9、供夹机构;9-1、供夹平台;9-2、输送板;9-3、输送槽;9-4、夹推杆;9-5、供夹平台安装板;9-6、滑孔;9-7、夹推气缸;9-8、推夹板;9-9、第一z向气缸;9-10、第一气缸安装板;
55.10、砧木夹取移动机构;10-1、第二z向气缸;10-2、第一y向丝杆;10-3、电机;10-4、第八滑块;10-5、第八滑轨;10-6、第九滑块;10-7、第九滑轨;10-8、联轴器;10-9、第十滑轨;
10-10、第十滑块;10-11、第八滑轨座;10-12、第一x向气缸;10-13、第二气缸安装板;10-14、第一夹取传感器;、10-15、第二夹取传感器;
56.11、接穗夹取移动机构;11-1、x向丝杆;11-2、x向导轨;11-3、x向丝杆电机;11-4、第二y向丝杆;11-5、y向导轨;11-6、y向丝杆电机;11-7、第三z向气缸。
具体实施方式
57.以下结合说明书附图,对本发明作进一步说明,但本发明并不局限于以下实施例。
58.附图所示的利用贴接法的整排并行式穴盘苗嫁接机,包括机架、砧木苗输送机构1、接穗苗输送机构2、砧木夹取机构3、接穗夹取机构4、砧木拢苗机构5、接穗拢苗机构6、砧木苗斜切机构7、接穗苗斜切机构8、供夹机构9、砧木夹取移动机构10、接穗夹取移动机构11。
59.各个机构位置的平面布局(参见图1.4)为:砧木夹取机构3与砧木拢苗机构5布置在图中上部的左侧;往下(y方向)依次布置砧木苗输送机构1、砧木苗斜切机构7、接穗苗输送机构2以及接穗拢苗机构6;图中上部的右侧的布置是:对应于砧木苗输送机构的接穗夹取机构4、供夹机构9,对应于接穗苗输送机构2的接穗苗斜切机构8;此外,接穗夹取移动机构中的第二y向丝杆11-4竖直布置机架中间并且伸展至整个机架,以便于携带接穗夹取机构;砧木夹取移动机构10中的第一y向丝杆10-2则竖直布置在砧木苗输送机构1及其以上部位,以便于携带砧木夹取机构。
60.各个机构的z方向的高度布局(参见图1.2、图1.3)为:接穗夹取移动机构11最高,砧木苗斜切机构7和接穗苗斜切机构8最低;其中机构位于前述机构的中间部位。
61.所述输送机构(参见图2.1、图2.2)包括用于输送砧木苗盘的砧木苗输送机构、用于输送接穗苗盘的接穗苗输送机构,这2个输送机构并排设置并且结构相同(除传感器个数有差别),每个输送机构均包括输送平台1-1、通过轴承1-12可绕水平轴线转动地定位在输送机构平台两端的主动辊1-2与从动辊1-3、与主动辊和从动辊配合的输送带1-4以及通过传动单元驱动主动辊转动的输送电机1-5,输送平台上还设置有传感器;输送电机通过输送电机安装板1-6固定在输送平台上;传动单元包括固定在主动辊一端的大链轮(1-8)、固定在输送电机转轴上的小链轮(1-7)、连接大链轮与小链轮的输送链条(1-9);所述2个输送机构上均设置第一输送传感器1-10,砧木苗输送机构上还设置第二输送传感器1-11;第一输送传感器与第二输送传感器沿着输送平台输送苗盘的方向依次设置,两个第一输送传感器用于对砧木苗盘、接穗苗盘进行定位,第二输送传感器用于对经过处理的砧木盘进行定位。
62.所述拢苗机构的作用(参见图5.1至图5.3),是将穴盘中的所有苗在切削时保持直立状态,方便后续的切削,所述拢苗机构包括砧木拢苗机构和接穗拢苗机构,这两个拢苗机构结构相同,以砧木拢苗机构为例;包括水平固定在机架上的拢苗平台5-1、固定在拢苗平台上且配有第二无杆气缸滑块5-9的第二无杆气缸5-4、相互平行地设置在拢苗平台上平面且间隔距离的两个第四滑轨5-3、设置在第四滑轨上的两个第四滑块5-8、同时固定在两个第四滑块上和第二无杆气缸滑块5-9上并且由第二无杆气缸驱动以沿着两个第四滑轨移动(y方向移动)的拢苗架5-10、固定在拢苗架上的第五滑轨5-11、固定在第五滑轨上并且相互保持间距的五个第五滑块5-12、固定在五个第五滑块上并且由拢苗气缸5-16驱动以沿着第五滑轨移动的上拢苗杆连接板5-7、固定在上拢苗杆连接板上的上拢苗杆5-2-1、固定在拢
苗架上的下拢苗杆5-2-2、固定在拢苗架上的拢苗气缸5-6、固定在上拢苗杆连接板上并且和拢苗气缸的气缸杆连接的气缸连接件5-5。第二无杆气缸将拢苗架推出,可使得拢苗杆插入穴盘的苗茎之间中,每一对拢苗杆的两个拢苗杆(上拢苗杆5-2-1、下拢苗杆5-2-2)插入到一行苗的两侧(共十二对);拢苗气缸5-6伸出,通过气缸连接件带动上拢苗杆连接件在第五滑轨5-11上滑动,使得上拢苗杆靠近下拢苗杆(两个拢苗杆之间保持的距离大于苗茎的直径,作为切削时苗的靠山;刀片切削时苗茎受阻无法移动,从而保证切削效果)实现拢苗。
63.所述砧木斜切机构可一次性切削整盘的砧木苗(参见图6.1、图6.2);所述砧木斜切机构包括水平定位在机架上的切削平台7-1、相互平行地设置在切削平台上的两个第六滑轨7-4、设置在第六滑轨上的两个第六滑块7-7、固定在切削平台上且位于两个滑轨之间的第三无杆气缸(7-5)、同时固定在两个第六滑块上和第三无杆气缸滑块7-8上并且由无杆气缸驱动以沿着两个滑轨移动(y方向移动)的取苗杆座7-6、相互平行布置且后端固定在取苗杆座上的十二个砧木切削刀杆7-3以及分别通过螺栓固定在砧木切削刀杆的前端上并且相对于水平面倾斜角度(优选倾斜45
°
)的十二个刀头7-2。
64.所述砧木夹取机构(参见图3.1至图3.3)用于夹取切削下的砧木苗梢头部分;所述砧木夹取机构包括水平布置的夹苗平台3-7、相互平行且水平设置在取苗平台上的两个第一滑轨3-2、固定在夹苗平台上且位于两个第一滑轨的第一无杆气缸3-3、设置在第一滑轨上的两个第一滑块3-8、同时固定在两个第一滑块上和第一无杆气缸滑块上并且由第一无杆气缸驱动,以沿着两个滑轨移动(x方向移动)的取苗杆座3-6、固定在取苗杆座上的第二滑轨3-9、固定在第二滑轨上并且相互之间保持间距的五个第二滑块3-10、固定在五个滑块上并且可以沿着滑轨移动(y方向移动)的上拢苗杆连接板3-11、固定在上拢苗杆连接板上的上取苗杆3-1-1、固定在取苗杆座上的下取苗杆3-1-2、固定在取苗杆座上的第一夹取气缸3-4、固定在上拢苗杆连接板3-11上并且与取苗气缸的气缸杆连接的气缸连接件3-5。每个上取苗杆均与一个下取苗杆相互平行地配对设置并且可相互靠近,以用于夹持砧木苗。第一无杆气缸启动将取苗杆座推出,使得取苗杆插入穴盘中,一对(两个)取苗杆插入到一行苗的左右两侧(共6对);夹取气缸启动伸出,通过第一气缸连接件带动上拢苗杆连接板3-11在第二滑轨3-9上滑动,使得上取苗杆靠近下取苗杆实现夹苗。
65.所述砧木夹取移动机构用于移动砧木夹取机构;包括一个丝杆传动机构和一个x向气缸。所述丝杆传动机构包括相互平行并且间隔距离地固定在机架上的两个第十滑轨10-9(沿着x方向布置)、分别与两个第十滑轨滑动配合的两个第十滑块10-10、固定在两个滑块(10-10)上的第八滑轨座10-11、固定在第八滑轨座上并且有一定间隔的第一夹取传感器10-14和第二夹取传感器10-15、固定在第八滑轨座上的电机10-3、固定在第八滑轨座上的第八滑轨10-5(沿着y方向布置)、固定在第八滑轨座上并且通过联轴器10-8和电机连接的第一y向丝杆10-2(沿着y方向布置)、与第一y向丝杆螺纹配合并且可以沿着第八滑轨在y方向滑动移动的三个第八滑块10-4、固定在中间的第八滑块上的第二z向气缸10-1、分别通过连接板固定在其余两个第八滑块上的两个第九滑轨上的两个第九滑轨10-7、分别与两个第九滑轨滑动配合的两个第九滑块10-6。第一x向气缸10-12通过气缸安装板固定在机架上,气缸杆则与第八滑轨座10-11上相连接,第一x向气缸启动则可推动丝杆传动机构沿着第十滑轨10-9移动。
66.所述夹苗平台3-7水平固定在1两个第九滑块10-6上并且与第二z向气缸10-1的气
缸杆连接,由第二z向气缸带动在第九滑轨10-7上移动(z方向移动);由丝杆传动机构带动夹取平台在y方向移动。
67.所述接穗夹取机构(参见图4)用于夹取经过切削的接穗苗的梢头。所述接穗夹取机构包括水平固定在第三z向气缸11-7上的取苗平台4-1、水平固定在取苗平台上的第三滑轨4-6、与第三滑轨配合并且相互之间保持间距的三个第三滑块4-5、固定在三个第三滑块上从而可以沿着y方向在第三滑轨移动的上取苗爪连接板4-7、间隔距离排列并且固定在上取苗爪连接板上的若干个上取苗爪4-3-1、间隔距离排列并且固定在取苗平台上的若干个下取苗爪4-3-2、通过螺栓固定在取苗平台上的第二夹取气缸4-2、固定在上取苗爪连接板上并且和第二夹取气缸连接的第二气缸连接件4-4。每个上取苗爪均与一个下取苗爪相互平行地配对设置并且可相互靠近,以用于夹持接穗苗。第三z向气缸由接穗夹取移动机构的y向丝杆传动机构带动;第二夹取气缸伸出,通过第二气缸连接件带动上取苗爪连接板在第三滑轨4-6上滑动,使得上取苗爪靠近下取苗爪,从而将接穗苗夹住固定,实现夹苗。
68.所述接穗夹取移动机构(参见图11)包括相互平行地水平固定在机架上并且间隔距离的两个x向丝杆传动机构、固定在这两个x向丝杆传动机构滑块上的y向丝杆传动机构、固定在y向丝杆传动机构的滑块上的第三z向气缸7;两个传感器(第一夹取传感器10-14与第二夹取传感器10-15)固定在y向丝杆传动机构的导轨座上。每个x向丝杆传动机构包括一个通过x向导轨座固定在机架上的x向导轨11-2、通过轴承可转动地定位在x向导轨座上的x向丝杆11-1、与x向导轨滑动配合且同时与x向丝杆螺纹配合的x向滑块以及与x向导轨座固定且通过联轴器与所述x向丝杆动力连接的x向电机。每个y向丝杆传动机构包括一个通过y向导轨座与两个x向滑块固定的y向导轨11-5、通过轴承可转动地定位在y向导轨座上的第二y向丝杆11-4、与y向导轨滑动配合且同时与第二y向丝杆螺纹配合的y向滑块以及与y向导轨座固定且通过联轴器与所述第二y向丝杆动力连接的y向电机11-3。第三z向气缸固定在y向滑块上,其气缸杆与所述取苗平台4-1固定连接。
69.所述供夹机构(参见图8.1至图8.3)用于将经过切削的接穗苗与砧木固定为一体(现有技术);所述供夹机构包括倾斜布置且由第一z向气缸带动的供夹平台9-1、设置在供夹平台上的输送板9-2、制于输送板上的5条相互平行布置的输送槽9-3(每个输送槽均用于放入嫁接夹)、置于每个输送槽中的滑孔9-6、可移动地定位在供夹平台与输送板之间的推夹板9-8、缸体固定在供夹平台上用于推动推夹板的供夹气缸9-7(其活塞杆与推夹板连接)、倾斜固定在输送板上的供夹平台安装板9-5以及一一定位在输送槽中并且底端穿过滑孔后与夹推板固定的若干推夹杆9-4。所述供夹平台安装板连接第一z向气缸9-9的气缸杆,由第一z向气缸带动供夹机构z向运动,所述第一z向气缸通过第一气缸安装板9-10固定在机架上。
70.相邻输送槽的间距与穴盘穴孔间距相适合,输送槽的宽度与嫁接夹的尺寸相适合并且输送槽的宽度从上往下逐渐减小,输送槽排列方向垂直于砧木苗输送机构的输送方向,供夹气缸的伸缩方向垂直于第二夹取气缸4-2的伸缩方向;嫁接夹(图中省略)由外部装置放入输送槽中,供夹气缸通过夹推杆推动嫁接夹在输送槽中滑动,嫁接夹移动时逐渐收窄的槽壁会挤压嫁接夹的夹臂使其夹口打开,嫁接夹被推出输送槽后在自身弹力作用下关闭夹口,从而将接穗苗与砧木夹紧,完成嫁接。
71.所述接穗斜切机构(参见图7.1、图7.2)用于切削y方向的整排接穗苗。所述接穗斜
切机构包括水平固定在机架上的接穗切削平台8-1、固定在切削平台上的第四无杆气缸8-5、相互平行地固定在切削平台上的两个第七滑轨8-4、一一与两个第七滑轨上的两个第七滑块8-7、同时固定在两个第七滑块上和第四无杆气缸滑块上并且由无杆气缸驱动以沿着x方向在两个第七滑轨移动的接穗苗座8-6、相互平行且间隔距离地固定在接穗苗座上(切削刀杆的后端固定在接穗苗座)的六个接穗切削刀杆8-3以及一一固定在接穗切削刀杆前端并且相对于水平面倾斜角度(优选倾斜45
°
)的六个个接穗刀片8-2。
72.本发明中,砧木苗盘、接穗苗盘均采用6*12孔的穴盘。本发明采用贴接法进行嫁接,即先将砧木苗和接穗苗斜切,再将其对准后用嫁接连接固定。为实现对整排砧木苗、接穗苗的同时嫁接,以提高效率,根据6*12孔穴盘的尺寸设计了拢苗机构、斜切机构、夹取机构、供夹机构,拢苗机构拢苗杆间距,斜切机构的刀片间距、砧木夹取机构夹取抓手与接穗夹取机构夹取抓手的间距、输送槽的间距均与穴盘的穴孔间距相同,以保证嫁接夹夹取固定的精度。
73.以上所有部件的运动,由plc控制器电连接各传感器、各电机进行控制为方便辨识,本发明图中标注有xyz坐标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1