一种菊花自动采摘装置及其使用方法
1.本发明涉及菊花采摘技术领域,具体为一种菊花自动采摘装置及其使用方法。
背景技术:
2.菊花是一种常用中药材,为菊科菊属的多年生宿根草本植物。具有散风清热、平肝明目、清热解毒等功效,既可以作为茶日常饮用,也是一种中药。作为茶药兼用的菊花,在近些年发展迅猛,种植面积越来越大。目前基本为人工采收或者手持式的菊花采摘器,采摘成本高且采摘时间过长会导致采摘人员身体不适。
3.现有的采摘机器也有全自动的,类似于联合收割机,将整株菊花除去,由于菊花开花时间不一致,花期较短,不及时采摘影响菊花品质,并且采摘只需要菊花不需要整株除去。菊花的采摘人工成本成为严重制约菊花产业发展的重要因素,所以迫切需要智能菊花采摘装置。模仿人工采摘菊花,梳齿的效率最高,但现有设计方案并不实用,大多将收集用的传送带或收集器置于梳齿的下面,妨碍了梳齿采摘菊花。
技术实现要素:
4.为了解决上述技术问题,本发明提出了一种菊花自动采摘装置及其使用方法。
5.本发明所要解决的技术问题采用以下技术方案来实现:
6.一种菊花自动采摘装置,包括:
7.移动转向机构,所述移动转向机构用于移动与转向,所述移动转向机构包括机架、设置在所述机架底部的驱动轮、设置在所述机架前端的转向机构;
8.传动定位机构,所述传动定位机构设置在所述机架上,所述传动定位机构包括安装在所述机架上的增高架、安装在所述增高架两侧的x方向传动定位机构、安装在所述x方向传动定位机构上的y方向传动定位机构、安装在所述y方向传动定位机构上的z方向传动定位机构;
9.手爪采摘机构,所述手爪采摘机构用于自动采摘菊花,所述手爪采摘机构安装在所述z方向传动定位机构上。
10.作为本发明的进一步改进,所述转向机构包括安装在所述机架前端的转动底板、通过一号深沟球轴承与所述转动底板连接的转向支架、设置在所述转向支架底部的支撑轮、通过固定螺钉固定安装在所述转动底板上的轴承盖,所述转动底板上设置有转向舵机,所述转向舵机连接有摇杆,所述摇杆连接有一号连杆、二号连杆,所述一号连杆、二号连杆连接有转向块,所述转向块与所述转向支架连接。
11.作为本发明的进一步改进,所述x方向传动定位机构包括设置在所述增高架上的长丝杠导轨底座、通过二号深沟球轴承安装在所述长丝杠导轨底座上的长丝杠、设置在所述长丝杠上的长丝杠螺母副,所述长丝杠的一端通过长丝杠异径弹性联轴器连接有长丝杠步进电机,所述y方向传动定位机构安装在所述长丝杠螺母副上。
12.作为本发明的进一步改进,所述y方向传动定位机构包括安装在所述长丝杠螺母
副上的短丝杠导轨底座、安装在所述短丝杠导轨底座内部的导轨杆、通过三号深沟球轴承安装在所述短丝杠导轨底座内部的短丝杠、对应安装在所述导轨杆、所述短丝杠上的短丝杠螺母副,所述导轨杆、短丝杠平行安装,所述短丝杠的一端通过短丝杠异径弹性联轴器连接有短丝杠步进电机,所述z方向传动定位机构安装在所述短丝杠螺母副上。
13.作为本发明的进一步改进,所述z方向传动定位机构包括安装在所述短丝杠螺母副上的升降丝杠导轨底座、安装在所述升降丝杠导轨底座上的升降丝杠、安装在所述升降丝杠上的升降丝杠螺母副,所述升降丝杠的上端通过升降丝杠异径弹性联轴器连接有升降丝杠步进电机,所述手爪采摘机构安装在所述升降丝杠螺母副上。
14.作为本发明的进一步改进,所述手爪采摘机构包括安装在所述升降丝杠螺母副上的连接架、通过安装连接板与所述连接架连接的手爪支架、安装在所述机架上的收纳盒,所述连接架上设置有手爪开合驱动装置,所述手爪支架上安装有手爪采摘装置,所述手爪采摘装置与所述手爪开合驱动装置连接。
15.作为本发明的进一步改进,所述手爪开合驱动装置包括设置在所述连接架上的手爪开合丝杠导轨底座、手爪开合丝杠支架、安装在所述手爪开合丝杠导轨底座上的手爪开合丝杠步进电机、安装在所述手爪开合丝杠支架上的手爪开合丝杠,所述手爪开合丝杠步进电机通过手爪开合丝杠异径弹性联轴器与所述手爪开合丝杠连接,所述手爪开合丝杠上安装有手爪开合丝杠螺母副,所述手爪采摘装置与所述手爪开合丝杠螺母副连接。
16.作为本发明的进一步改进,所述手爪采摘装置包括与所述手爪开合丝杠螺母副连接的齿条、通过一号转轴安装在所述手爪支架上的扇形齿轮摇杆、三号连杆、通过二号转轴与所述扇形齿轮摇杆、三号连杆连接的梳齿支架,所述梳齿支架上安装有梳齿,所述扇形齿轮摇杆、三号连杆、梳齿支架、梳齿、一号转轴、二号转轴设置有两组,沿所述齿条对称分布,两组中的所述扇形齿轮摇杆均与所述齿条啮合。
17.一种菊花自动采摘装置的使用方法,利用一种菊花自动采摘装置,具体步骤如下:
18.步骤一:可通过视觉识别或人工遥控的方式控制移动转向机构运动,移动转向机构通过驱动轮使采摘装置前后移动,通过转向舵机调整采摘装置的移动方向,到达需要采摘的菊花位置;
19.步骤二:移动转向机构移动至所需采摘的菊花植株位置后,利用传动定位机构移动手爪采摘机构,使其到达可采摘菊花的位置;
20.步骤三:x方向传动定位机构使手爪采摘机构沿纵向方向移动,使手爪采摘机构移动至采摘装置的前端采摘位置;
21.步骤四:y方向传动定位机构使手爪采摘机构沿横向方向移动,使手爪采摘机构移动至采摘植株的正上方;
22.步骤五:启动手爪开合丝杠步进电机,驱动齿条向下运动,通过齿条与扇形齿轮摇杆的扇形齿轮啮合,使梳齿打开;
23.步骤六:z方向传动定位机构使手爪采摘机构沿竖直方向向下移动,达到合适的采摘位置;
24.步骤七:再次启动手爪开合丝杠步进电机,驱动齿条向上运动,通过齿条与扇形齿轮摇杆的扇形齿轮啮合,使梳齿闭合,实现菊花采摘;
25.步骤八:z方向传动定位机构使手爪采摘机构向上移动;
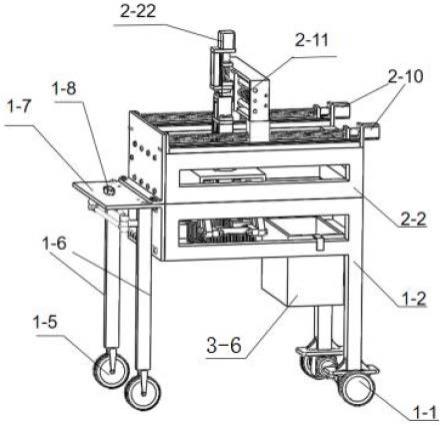
12、导轨杆2-13、短丝杠2-14、三号深沟球轴承2-15、短丝杠异径弹性联轴器2-16、短丝杠步进电机2-17组成。所述短丝杠导轨底座2-11的两端固定安装在两组x方向传动定位机构2-1中的两个长丝杠螺母副2-8上,所述短丝杠2-14通过两端的三号深沟球轴承2-15安装在所述短丝杠导轨底座2-11内,所述导轨杆2-13设置有两个,与所述短丝杠2-14平行安装于所述短丝杠导轨底座2-11内,所述短丝杠螺母副2-12对应安装在两个导轨杆2-13、短丝杠2-14上,所述z方向传动定位机构2-4竖直安装在所述短丝杠螺母副2-12上,所述短丝杠2-14的左端通过所述短丝杠异径弹性联轴器2-16与所述短丝杠步进电机2-17同轴连接。
61.进一步地,所述z方向传动定位机构2-4由升降丝杠导轨底座2-18、升降丝杠螺母副2-19、升降丝杠2-20、升降丝杠异径弹性联轴器2-21、升降丝杠步进电机2-22组成。所述升降丝杠导轨底座2-18竖直安装在所述短丝杠螺母副2-12上,所述升降丝杠2-20竖直安装在所述升降丝杠导轨底座2-18上,所述升降丝杠螺母副2-19安装在所述升降丝杠2-20上,所述升降丝杠2-20的上端通过所述升降丝杠异径弹性联轴器2-21与所述升降丝杠步进电机2-22同轴连接,所述手爪采摘机构3安装在所述升降丝杠螺母副2-19上。
62.具体的,所述手爪采摘机构3包括安装在所述升降丝杠螺母副2-19上的连接架3-16、通过安装连接板3-12与所述连接架3-16连接的手爪支架3-2、安装在所述机架1-2上的收纳盒3-6,所述连接架3-16上设置有手爪开合驱动装置3-1,所述手爪支架3-2上安装有手爪采摘装置,所述手爪采摘装置与所述手爪开合驱动装置3-1连接。
63.进一步地,所述手爪开合驱动装置3-1由手爪开合丝杠导轨底座3-9、手爪开合丝杠3-10、手爪开合丝杠螺母副3-11、手爪开合丝杠支架3-13、手爪开合丝杠异径弹性联轴器3-14、手爪开合丝杠步进电机3-15组成。所述手爪开合丝杠导轨底座3-9、所述手爪开合丝杠支架3-13安装在所述连接架3-16上,所述手爪开合丝杠步进电机3-15安装在所述手爪开合丝杠导轨底座3-9上,所述手爪开合丝杠3-10安装在所述手爪开合丝杠支架3-13上,所述手爪开合丝杠步进电机3-15通过所述手爪开合丝杠异径弹性联轴器3-14与所述手爪开合丝杠3-10同轴连接,所述手爪开合丝杠螺母副3-11安装在手爪开合丝杠3-10上,所述手爪采摘装置与所述手爪开合丝杠螺母副3-11连接。
64.进一步地,所述手爪采摘装置由扇形齿轮摇杆3-3、三号连杆3-4、齿条3-5、梳齿支架3-7、梳齿3-8、一号转轴3-17、二号转轴3-18组成。所述齿条3-5固定安装在所述手爪开合丝杠螺母副3-11上,所述扇形齿轮摇杆3-3、三号连杆3-4、梳齿支架3-7、梳齿3-8、一号转轴3-17、二号转轴3-18设置有两组,且以所述齿条3-5对称分布,所述扇形齿轮摇杆3-3与所述齿条3-5啮合连接,所述扇形齿轮摇杆3-3、三号连杆3-4通过一号转轴3-17安装在手爪支架3-2上,所述梳齿支架3-7通过所述二号转轴3-18与所述扇形齿轮摇杆3-3、所述三号连杆3-4连接,所述梳齿3-8设置有多个,且对应安装在所述梳齿支架3-7上,通过所述齿条3-5上下移动,带动扇形齿轮摇杆3-3顺逆时针转动,使得两个梳齿支架3-7上的梳齿3-8进行开合动作,实现菊花采摘。
65.一种菊花自动采摘装置的使用方法,利用上述的一种菊花自动采摘装置,具体步骤如下:
66.步骤一:可通过视觉识别或人工遥控的方式控制移动转向机构1运动,移动转向机构1通过驱动轮1-1使采摘装置前后移动,通过转向舵机1-8调整采摘装置的移动方向,到达需要采摘的菊花位置。
67.步骤二:移动转向机构1移动至所需采摘的菊花植株位置后,利用传动定位机构2移动手爪采摘机构3,使其到达可采摘菊花的位置。
68.步骤三:x方向传动定位机构2-1使手爪采摘机构3沿纵向方向移动,使手爪采摘机构3移动至采摘装置的前端采摘位置。
69.步骤四:y方向传动定位机构2-3使手爪采摘机构3沿横向方向移动,使手爪采摘机构3移动至采摘植株的正上方。
70.步骤五:启动手爪开合丝杠步进电机3-15,驱动齿条3-5向下运动,通过齿条3-5与扇形齿轮摇杆3-3的扇形齿轮啮合,使梳齿3-8打开。
71.步骤六:z方向传动定位机构2-4使手爪采摘机构3沿竖直方向向下移动,达到合适的采摘位置。
72.步骤七:再次启动手爪开合丝杠步进电机3-15,驱动齿条3-5向上运动,通过齿条3-5与扇形齿轮摇杆3-3的扇形齿轮啮合,使梳齿3-8闭合,实现菊花采摘。
73.步骤八:z方向传动定位机构2-4使手爪采摘机构3向上移动。
74.步骤九:x方向传动定位机构2-1使手爪采摘机构3纵向移动至后端收纳盒3-6的上方位置。
75.步骤十:再次启动手爪开合丝杠步进电机3-15,驱动齿条3-5向下运动,通过齿条3-5与扇形齿轮摇杆3-3的扇形齿轮啮合,使梳齿3-8打开,把采下的菊花放置于收纳盒3-6内,然后,回到步骤一进行下一个循环采摘工作。
76.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1