一种植树灌溉一体化智能小车
1.本发明涉及植树设备技术领域,尤其涉及一种植树灌溉一体化智能小车。
背景技术:
2.土地荒漠化,使土地失去生物生产能力,沙土侵占农田、草地和林地,威胁交通与村镇。它是全球性的环境问题之一。目前,全球荒漠化土地面积有3600万平方公里,占全球陆地面积的四分之一,相当于俄罗斯、加拿大、中国和美国国土的总和,并以每年5万至7万平方公里的速度扩大。我国是世界上荒漠及荒漠化土地分布较广的国家,已经荒漠化的土地面积17.6万平方公里,另有潜在荒漠化危险的土地面积15.8万平方公里。据中科院兰州沙漠研究所的资料,我国50~70年代,土地荒漠化速度为每年增加1560平方公里;从70~80年代,其速度已为每年增加2100平方公里;目前则扩展至每年增加2460平方公里。速度之快令人震惊。目前,我国约有6000万亩农田处在荒漠化威胁之中。虽然有些局部地区的土地荒漠化得到有效的遏制或改善,从总体上看,我国土地荒漠化仍在加速扩展和蔓延。若将其与沙漠和戈壁合计,则有153.3万平方公里,几乎占全国土地面积的16%。
3.鉴于目前国内植树造林的工作依然靠人力完成,尤其是钻孔深栽造林,使用人工方式进行造林,不仅费时费力,劳动强度高,而且效率低下,极大降低了植树造林的速度。
4.市面上涌现自动植树设备,如申请号cn202111373634.8,名称为一种用于毛白杨深栽造林的全自动植树装的专利采用机械手将树苗夹起栽入挖坑机构挖好的树坑内,机械手需要较多的原动件来驱动,制造、组装工艺复杂,成本高,为此需要提供一种节约成本的自动植树小车。
技术实现要素:
5.为此,需要提供一种植树灌溉一体化智能小车,解决市面上涌现自动植树设备,它采用机械手将树苗夹起栽入挖坑机构挖好的树坑内,机械手需要较多的原动件来驱动,制造、组装工艺复杂,成本高的问题。
6.为实现上述目的,本技术提供一种植树灌溉一体化智能小车,包括:
7.底盘;
8.行进装置,所述行进装置设置在所述底盘上,用于驱动智能小车行进;
9.钻土装置,所述钻土装置设置在所述底盘上,用于钻土;
10.灌溉装置,所述灌溉装置设置在所述底盘上,用于灌溉树苗;
11.抓手装置,所述抓手装置包括抓手动力机构、驱动件、引导件、第一滑程件、第二滑程件和滑程轴,所述抓手动力机构设置在所述底盘上,并与所述驱动件相连接,用于驱动所述驱动件转动,所述驱动件上设置有驱动滑槽,所述引导件设置在所述底盘上,所述引导件上设置有引导滑槽,所述引导滑槽包括依次连接的第一段、第二段和第三段,所述第二段为弧形,所述第一滑程件可转动地设置在所述底盘上,所述第一滑程件设置有滑程滑槽,所述压紧件的下端通过第一滑槽滑块组件设置在所述第一滑程件上,所述第一滑槽滑块组件中
的滑槽倾斜于水平面,所述第二滑程件和所述第一滑程件之间为直线滑动连接,所述压紧件的上端可转动地设置在所述第二滑程件的上端,所述第二滑程件的下端套设在所述滑程轴上,所述滑程轴还滑动设置在所述滑程滑槽、所述引导滑槽和所述驱动滑槽中,所述抓手动力机构用于驱动第二滑程件跟随滑程轴转动,驱动压紧件将树苗压紧在第二滑程件上,以及驱动压紧件松开第二滑程件上的树苗。
12.进一步地:所述第一滑程件和所述第二滑程件之间设置有第二滑槽滑块组件,用于引导所述第一滑程件和所述第二滑程件之间进行直线移动,所述第二滑槽滑块组件的滑块设置在所述第二滑程件上,所述第二滑槽滑块组件的滑槽为滑程滑槽。
13.进一步地:所述第一段和所述第三段均为笔直的,所述第一段和所述第三段相垂直以使得第二滑程件跟随滑程轴转动90
°
。
14.进一步地:所述驱动件、所述引导件、所述第一滑程件分别为两个,两个所述第一滑程件之间设置有所述第二滑程件,且两个所述第一滑程件之间相互固定,两个所述引导件之间设置有两个所述第一滑程件,两个所述驱动件之间设置有两个所述引导件,两个所述驱动件之间通过联动轴固定在一起,所述联动轴与所述抓手动力机构通过齿轮连接。
15.进一步地:还包括填土装置,所述填土装置设置在所述底盘上,用于压实土壤。
16.进一步地:所述填土装置包括填土单元,所述填土单元均包括填土动力机构、动力连杆、填土连杆和压片,所述填土动力机构设置在所述底盘上,用于在水平方向上推动动力连杆,所述动力连杆的一端可转动地设置在所述填土动力机构上,所述动力连杆的另一端转动地设置在所述填土连杆上,所述填土连杆的顶部通过第三滑槽滑块组件设置在所述底盘上,所述第三滑槽滑块组件中的滑槽倾斜于水平方向使得填土连杆倾斜于水平方向移动,所述填土连杆的底部可转动地设置在所述压片上。
17.进一步地:所述填土动力机构包括减速电机、链条和第四滑槽滑块组件,所述减速电机设置在所述底盘上,所述减速电机与所述链条相连接,所述链条沿着水平方向设置,所述动力连杆的一端可转动地设置在所述填土动力机构的第四滑槽滑块组件的滑块上,所述第四滑槽滑块组件的滑块还设置在所述链条上,第四滑槽滑块组件中的滑槽设置在所述底盘上。
18.进一步地:填土单元为两个,两个所述填土单元位于同一水平方向上,二者之间对称设置,两个所述填土单元中的压片相对运动以压实土壤。
19.进一步地:还包括送苗装置,所述送苗装置设置在所述底盘上,并位于所述抓手装置的上方。
20.进一步地:所述灌溉装置包括蓄水瓶、泵和阀门,所述蓄水瓶设置在底盘上,所述泵的输入端连接蓄水瓶,所述泵的输出端连接有管道。
21.区别于现有技术,上述技术方案中,抓手装置依靠驱动件推动滑程轴在滑程滑槽、引导滑槽和驱动滑槽中移动,使得抓手装置实现抓紧、松开和上下摆动的功能,抓手装置可连续性作业,且结构设计巧妙,运作可靠,成本低廉,自动化程度高,减少人工劳动强度,提高植树造林的效率。
附图说明
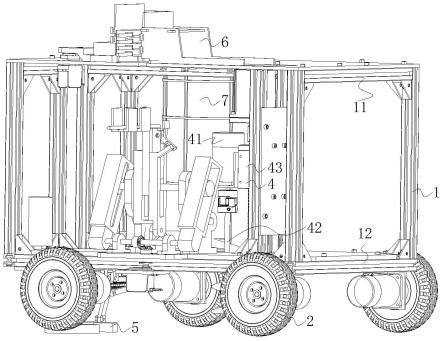
22.图1为本实施例中植树灌溉一体化智能小车的结构示意图;
23.图2为本实施例中抓手装置的结构示意图;
24.图3为本实施例中引导件的结构示意图;
25.图4为本实施例中填土装置的结构示意图;
26.图5为本实施例中送苗装置的结构示意图。
27.附图标记说明:
28.1、底盘;
29.11、上层;12、下层;
30.2、行进装置;
31.3、抓手装置;
32.31、抓手动力机构;311、抓手电机;312、伞齿轮;313、联动轴;
33.32、驱动件;321、驱动滑槽;
34.33、引导件;331、引导滑槽;332、第一段;333、第二段;334、第三段;
35.34、第一滑程件;341、压紧件;
36.35、第二滑程件;351、承载面;
37.36、滑程轴;
38.37、第一滑槽滑块组件;
39.38、第二滑槽滑块组件;
40.4、钻土装置;
41.41、钻土电机;42、钻土头;43、升降机构;
42.5、填土装置;
43.51、填土单元;
44.52、填土动力机构;521、链条;522、第四滑槽滑块组件;
45.53、动力连杆;54、填土连杆;55、压片;56、第三滑槽滑块组件;
46.6、送苗装置;
47.61、固定座;62、送苗动力机构;621、舵机;622、凸轮组件;63、送苗板;64、第一树苗通道;
48.7、灌溉装置。
具体实施方式
49.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
50.请参阅图1至图5,本实施例一种植树灌溉一体化智能小车,包括:
51.底盘1;
52.行进装置2,行进装置2设置在底盘1上,用于驱动智能小车行进;
53.钻土装置4,钻土装置4设置在底盘1上,用于钻土;
54.抓手装置3,抓手装置3包括抓手动力机构31、驱动件32、引导件33、第一滑程件34、第二滑程件35和滑程轴36,抓手动力机构31设置在底盘1上,并与驱动件32相连接,用于驱
动驱动件32转动,驱动件32上设置有驱动滑槽321,引导件33设置在底盘1上,引导件33上设置有引导滑槽331,引导滑槽331包括依次连接的第一段332、第二段333和第三段334,第二段333为弧形,第一滑程件34可转动地设置在底盘1上,第一滑程件34设置有滑程滑槽,压紧件341的下端通过第一滑槽滑块组件37设置在第一滑程件34上,第一滑槽滑块组件中的滑槽倾斜于水平面,第二滑程件35和第一滑程件34之间为直线滑动连接,压紧件341的上端可转动地设置在第二滑程件35的上端,第二滑程件35的下端套设在滑程轴36上,滑程轴36在移动时会带动第二滑程件35移动,此时第二滑程件35和第一滑程件34之间为滑动连接,滑程轴36还滑动设置在滑程滑槽、引导滑槽331和驱动滑槽321中,滑程轴36沿着这些槽的走向滑动,进而引导驱动件32、引导件33、第一滑程件34、第二滑程件35之间做出相应的动作,抓手动力机构31用于驱动第二滑程件35跟随滑程轴36转动,驱动压紧件341将树苗压紧在第二滑程件35上,以及驱动压紧件341松开第二滑程件35上的树苗。
55.请参阅图1至图3,需要说明的是,滑程轴36的尺寸和驱动滑槽321的尺寸相适配,使得滑程轴36可以沿着驱动滑槽321的壁滑动,驱动滑槽321的长度是沿着竖直方向设置的,驱动滑槽321的深度是沿着水平方向设置的,滑程轴36的尺寸和引导滑槽331的尺寸相适配,使得滑程轴36可以沿着引导滑槽331的壁滑动;滑程轴36的端部设置有限位部,防止滑程轴36与驱动滑槽321想脱离;引导滑槽331的长度是沿着竖直方向设置的,引导滑槽331的深度是沿着水平方向设置的,滑程轴36的尺寸和滑程滑槽的尺寸相适配,使得滑程轴36可以沿着滑程滑槽的壁滑动,滑程滑槽的长度是沿着竖直方向设置的,滑程滑槽的深度是沿着水平方向设置的;
56.请参阅图1和图2,需要说明的是,驱动件32在抓手动力机构31的驱动下而转动,使得滑程轴36在驱动滑槽321中滑动,又因为滑程轴36还滑动连接在引导滑槽331和滑程滑槽中,导致滑程轴36带动第一滑程件34和第二滑程件35之间滑动连接,第一滑程件34和第二滑程件35之间的滑动轨迹受第一滑槽滑块组件37的限制,压紧件341在第二滑程件35上转动,第二滑程件35具有一个用于承载树苗的承载面351,压紧件341朝向第二滑程件35的承载面351转动(对应滑程轴36自第一段332的首端滑动至第一段332的尾端这一过程),之后压紧在承载面351上,进而抓紧树苗,压紧件341朝着远离承载面351的方向转动(对应滑程轴36自第三段334的首端滑动至第三段334的尾端这一过程),进而松开树苗,在抓紧树苗和松开树苗的过程中,承载面351随滑程轴36转动,在松开树苗时承载面351是倾斜于水平方向的,使得树苗可以依靠自身重力掉落,承载面351的初始位置(对应滑程轴36在第一段332的首端处)是平行于水平方向的,使得树苗平放其上。
57.请参阅图2,需要说明的是,第一滑槽滑块组件37具有第一滑块和第一滑槽,第一滑块滑动设置在第一滑槽上,以沿着第一滑槽的长度方向滑动。滑块指的是在物体上的一个凸起物。滑槽的形式有两种,第一种为在物体上的一道槽,结构如图2所示,第二种为在物体两侧壁上分别有一道槽。为了达到直线运动,滑槽是一道笔直的槽。滑槽和滑块的位置可以对调,在图2中,第一滑槽滑块组件37的第一滑块固定在第一滑程件34的顶部,第一滑槽滑块组件37的第一滑槽设置在压紧件341的下端,在某些实施例中,第一滑槽滑块组件37的第一滑块固定在压紧件341的底部,第一滑槽滑块组件37的第一滑槽设置在第一滑程件34的上端。
58.区别于现有技术,上述技术方案中,抓手装置依靠驱动件推动滑程轴在滑程滑槽、
引导滑槽和驱动滑槽中移动,使得抓手装置实现抓紧、松开和上下摆动的功能,抓手装置可连续性作业,且结构设计巧妙,运作可靠,成本低廉,自动化程度高,减少人工劳动强度,提高植树造林的效率。
59.请参阅图2,根据本技术的一种实施例,第二滑程件35在滑程轴36的带动下在第一滑程件34上滑动,为了让第一滑程件34和第二滑程件35之间是沿着预设方向滑动的,第一滑程件34和第二滑程件35之间设置有第二滑槽滑块组件38,用于引导第一滑程件34和第二滑程件35之间进行直线滑动。第二滑槽滑块组件38的滑块设置在第二滑程件35上,第二滑槽滑块组件38的滑块也称第二滑块,第二滑槽滑块组件38的滑槽也称滑程滑槽,第二滑槽滑块组件38的滑槽为滑程滑槽,也称第二滑槽。滑程滑槽是一道笔直的槽,设置在第一滑程件34上。因为滑程轴36会沿着第二滑槽(也称滑程滑槽)移动,第一滑程件34在底盘1上转动,第二滑程件35在第二滑槽滑块组件38的带动下稳定地移动,使整体受力问题定,不易偏离预设方向。
60.抓手装置原动件只需一个舵机或者电机,就可以实现抓苗和放置这些流程,而现有的抓手装置需要的原动件较多,所需要的精确度也更高。
61.请参阅图3,根据本技术的一种实施例,第一段332和第三段334均为笔直的,第一段332和第三段334之间形成非零夹角,使得第二滑程件35跟随滑程轴36转动预设的角度。较佳地,第一段332和第三段334相垂直以使得第二滑程件35跟随滑程轴36转动90
°
,结构如图3所示,如此,第二滑程件35的承载面351的初始位置是平行于水平方向的,树苗可以自上而下落于第二滑程件35的承载面351上,另外,第二滑程件35跟随滑程轴36转动90
°
后承载面351是垂直于水平方向的,使得树苗最后是竖直地下坠,自底盘1贯穿而下,并落入树坑中。在某些实施例中,第一段332和第三段334之间形成60
°
、70
°
、80
°
等夹角,这样树苗是倾斜地自底盘1上的通孔贯穿而下,并落入树坑中。
62.根据本技术的一种实施例,根据滑程曲线来限制抓手的行进过程,还可以利用弹簧和滑程曲线控制抓手的抓紧和放开。
63.请参阅图1和图2,根据本技术的一种实施例,为了增加抓手装置3的稳定性,驱动件32、引导件33、第一滑程件34分别为两个。两个第一滑程件34之间设置有第二滑程件35,且两个第一滑程件34之间相互固定,两个第一滑程件34一起随着滑程轴36而移动。两个引导件33之间设置有两个第一滑程件34,两个驱动件32之间设置有两个引导件33,此时抓手装置3包含的部件如下:第一个驱动件32、第一个引导件33、第一个第一滑程件34、第二滑程件35、第二个第一滑程件34、第二个引导件33、第二个驱动件32。
64.两个驱动件32之间通过联动轴313固定在一起,联动轴313与抓手动力机构31通过齿轮连接,抓手动力机构31将动力通过联动轴313传递至驱动件32上,进而驱动抓手装置3取放树苗,赋予抓手装置3工作的连续性。
65.请参阅图2,根据本技术的一种实施例,抓手动力机构31选用抓手电机311,例如步进电机,可选用42bygh250c140型号步进电机,步进电机是根据其控制器所给的脉冲数大小来精确控制输出轴的转动角度,可以较好地计算出抓手装置3的位移量。联动轴313与抓手动力机构31通过伞齿轮312连接,抓手动力机构31的输出轴上套设有伞齿轮312,联动轴313上也套设一个伞齿轮312,两个伞齿轮312相啮合,这样的方式抓手动力机构31。在某些实施例中,联动轴313与抓手动力机构31通过直齿轮连接。
66.请参阅图1,根据本技术的一种实施例,植树灌溉一体化智能小车还包括填土装置5,填土装置5设置在底盘1上,用于压实土壤。
67.请参阅图4,根据本技术的一种实施例,填土装置5包括填土单元51,填土单元51均包括填土动力机构52、动力连杆53、填土连杆54和压片55。填土动力机构52设置在底盘1上,用于在水平方向上推动动力连杆53。动力连杆53的一端可转动地设置在填土动力机构52上,动力连杆53的另一端转动地设置在填土连杆54上。填土连杆54的顶部通过第三滑槽滑块组件56设置在底盘1上,第三滑槽滑块组件中的滑槽(也称为第三滑槽)倾斜于水平方向使得填土连杆54倾斜于水平方向移动,填土连杆54的底部可转动地设置在压片55上,这样压片55可以实时调整自身的姿态以压实土壤。需要说明的是,第三滑槽滑块组件56的第三滑块和第三滑槽可以相互对调,例如第三滑槽设置在底盘1上,第三滑块设置在填土连杆54上;或者第三滑槽设置在填土连杆54上,第三滑块设置在底盘1上。在第三滑槽滑块组件56的作用下,填土单元51是自树坑的外侧向树坑的内侧的方向移动压片55,将树坑周围的土壤往树坑中心推去,土壤覆盖在树根周围。
68.请参阅图4,根据本技术的一种实施例,填土动力机构52包括减速电机、链条521和第四滑槽滑块组件522。减速电机设置在底盘1上,减速电机与链条521相连接,链条521沿着水平方向设置。动力连杆53的一端可转动地设置在填土动力机构52的第四滑槽滑块组件522的滑块(也称为第四滑块)上,第四滑槽滑块组件522的滑块还设置在链条521上。链条521是沿着水平方向设置的,减速电机的输出轴是沿着竖直方向设置的。第四滑槽滑块组件522中的滑槽(也称为第四滑槽)设置在底盘1上,第四滑槽沿着水平方向设置,引导动力连杆53推动填土连杆54。
69.请参阅图4,根据本技术的一种实施例,填土单元51为两个,两个填土单元51位于同一水平方向上,二者之间对称设置,两个填土单元51中的压片55相对运动以压实土壤,即填土单元51中的压片55自外侧向内侧压实土壤,提高效率。
70.在某些实施例中,填土动力机构52是通过气缸或者液压缸来驱动压片55向下压实土壤。
71.请参阅图1和图5,根据本技术的一种实施例,植树灌溉一体化智能小车还包括送苗装置6,送苗装置6设置在底盘1上,并位于抓手装置3的上方,送苗装置6将树苗输送至抓手装置3上。在抓手装置3中,第二滑程件35的承载面351的初始位置是平行于水平方向的,送苗装置6位于承载面351的正上方,树苗自上而下落至承载面351上,而后抓手装置3将树苗运输至树坑中。
72.请参阅图5,根据本技术的一种实施例,送苗装置6包括固定座61、送苗动力机构62和送苗板63。底盘1包括上下两层,上层11和下层12相平行,上层11和下层12之间通过立杆固定在一起。上层11上设置有送苗装置6,下层12上设置抓手装置3、行进装置2、钻土装置4。固定座61设置在上层11上,并位于抓手装置3的上方,固定座61以及上层11上设置有第一树苗通道64。送苗板63的底部设置有容纳树苗的凹槽,使得树苗移动至第一树苗通道64处下落到下方的抓手装置3上。固定座61内滑动设置有多个送苗板63,多个送苗板63上下堆叠,送苗动力机构62推动下方的送苗板63至第一树苗通道64,使得送苗板63携带的树苗落入第一树苗通道64里。送苗动力机构62包括舵机621和凸轮组件622,舵机621设置在固定座61或者底盘1的上层11上,舵机621连接凸轮组件622,以驱动凸轮组件622推动送苗板63在固定
座61内移动。
73.根据本技术的一种实施例,下层12上设置还设置有供树苗通过的第二树苗通道,使得树苗自底盘1贯穿而下,并落入树坑中。
74.请参阅图1,根据本技术的一种实施例,植树灌溉一体化智能小车还包括灌溉装置7,灌溉装置7设置在底盘1上,用于灌溉树苗。灌溉装置7包括蓄水瓶、泵和阀门,蓄水瓶设置在底盘1上,泵的输入端连接蓄水瓶,泵是输送流体或使流体增压的机械。它将原动机的机械能或其他外部能量传送给液体,使液体能量增加。泵的输出端连接有管道,管道上连接有阀门,阀门用于控制输出端出水与否。依靠抽水泵配合阀门释放水源,灌溉在树苗的根部,完成植树工作。
75.请参阅图1,根据本技术的一种实施例,钻土装置4包括钻土机构和升降机构43,升降机构43设置在底盘1上,用于带动钻土机构在竖直方向上移动,钻土机构设置在升降机构43上,用于钻土。升降机构43包括气缸、液压缸、电动伸缩杆等,可以带动钻土机构直线移动,将升降机构43竖直设置,即可实现竖直方向上的移动。钻土机构包括钻土电机41和钻土头42,钻土电机41与升降机构43相连接,钻土电机41连接有钻土头42。需要说明的是,第二树苗通道是底盘1的下层12上的一道长长的槽,钻土头42贯穿第二树苗通道,升降机构43设置在底盘1的下层12上。
76.请参阅图1,根据本技术的一种实施例,行进装置2可以是行走轮行进装置或履带进装置。行走轮行进装置是电机驱动行走轮转动,进而带动植树灌溉一体化智能小车在路面上行进。履带进装置是电机驱动履带轮转动,以带动履带转动,最终带动植树灌溉一体化智能小车在路面上行进。
77.根据本技术的一种实施例,植树灌溉一体化智能小车还包括控制单元,行进装置、钻土装置、抓手装置、灌溉装置、填土装置、送苗装置分别连接控制单元,控制单元是植树灌溉一体化智能小车的控制核心,用于驱动行进装置、钻土装置、抓手装置、灌溉装置、填土装置、送苗装置这些装置运作。
78.根据本技术的一种实施例,控制单元采用arduino mega adk开发板实现智能控制,mega adk的处理器核心是atmega2560,相对其他开发板,arduino及周边产品相对质廉价优,学习或创作成本低,便于开发及日常生活中的维护,并且具有丰富的接口,有数字i/o口、模拟i/o口等,同时支持spi、iic、uart串口通信。
79.根据本技术的一种实施例,植树灌溉一体化智能小车有3种供电方式:1、通过usb接口供电,电压为5v;2、通过dc电源输入接口供电,电压要求7~12v;3、通过电源接口处5v或者vin端口供电,5v端口处供电必须为5v,vin端口处供电为7~12v。
80.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
81.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在限制本技术。
82.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
83.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
84.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
85.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
86.在本技术实施例的描述中,所使用的与空间相关的表述,诸如“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“垂直”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等,所指示的方位或位置关系是基于具体实施例或附图所示的方位或位置关系,仅是为了便于描述本技术的具体实施例或便于读者理解,而不是指示或暗示所指的装置或部件必须具有特定的位置、特定的方位、或以特定的方位构造或操作,因此不能理解为对本技术实施例的限制。
87.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
88.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1