一种羊舍推草饲喂机器人的制作方法
1.本发明属于农业智能装置领域,特别是涉及一种羊舍推草饲喂机器人。
背景技术:
2.目前,以现代农业背景为发展的畜牧业,多数是靠人工劳动作为服务支撑,少数规模较大的畜牧业场所引进了半自动化服务设备,对于大型养羊场中的羊舍草料投喂时的过道整理工作,仍然需要人工利用工具扫回围栏两侧。在畜羊进食过程中头从围栏中伸出时长会将草料从过道两侧的围栏前顶到中间过道上,导致此部分草料畜羊无法触到食用,如不及时将草料推回饲位会导致草料变质且污染羊舍并造成草料的浪费,投入人工扫回处理时间长,效率低,增加成本。
技术实现要素:
3.有鉴于此,本发明为了弥补现有条件下,羊舍饲喂技术中存在的问题,即大规模养羊场中羊舍饲喂草料进食过程中部分草料散落、出区无法触食、人工清理成本高,耗时长等问题,在一定程度上影响了企业的经济发展效益,进而发明一种羊舍推草饲喂机器人。
4.为实现上述目的,本发明采用以下技术方案:一种羊舍推草饲喂机器人,包括车体、固定推手组件、摆动推手组件和随动推手组件,所述车体的前方固定有固定推手组件,通过车体的行走进行推扫,所述固定推手组件与摆动推手组件和随动推手组件依次连接;
5.所述固定推手组件包括固定前推手和前推手下毛刷,所述固定前推手底部安装有前推手下毛刷,所述摆动推手组件包括摆动推手、摆动推手下毛刷和摆动推手驱动组件,所述摆动推手底部安装有摆动推手下毛刷,所述摆动推手驱动组件驱动摆动推手进行侧向清扫,所述随动摆手组件包括随动推手、随动推手下毛刷和限位杆机构,所述随动推手下方安装有随动推手下毛刷,所述车体与随动推手间连接有限位杆机构。
6.更进一步的,所述摆动推手驱动组件包括摆动动力源减速电机、摆动曲柄和驱动连杆,所述摆动动力源减速电机驱动摆动曲柄进行椭圆轨迹运动,携同驱动连杆形成对执行元件的拖拉,形成车体右侧的横向动作清扫。
7.更进一步的,所述摆动推手组件和随动推手组件通过多个弹性自回位铰链进行连接。
8.更进一步的,所述随动推手组件上连接有弹性支撑轮,所述弹性支撑轮为随动摆手组件随动适应地面提供了更佳的弹性支持。
9.更进一步的,所述车体四角安装有四个驱动轮组,依靠驱动轮组的互相配合转动来实现车体完成直线或曲线差速运动。
10.更进一步的,所述车体包括车底盘、上外壳、桶盖体、顶层防护罩、天线外壳和车体下壳,所述车底盘上罩有车体下壳,所述车体下壳顶部安装有上外壳,所述上外壳上安装有桶盖体,所述桶盖体上安装有顶层防护罩,所述顶层防护罩上安装有天线外壳,所述天线外壳内安装有天线电路板,所述天线电路板与电线定位系统控制电路板连接携同外部场地覆
盖的检测系统时时定位车体的位置。
11.更进一步的,所述车底盘上还装有plc控制模块,所述车底盘底部安装有两个磁条传感器,与场地内磁条和通讯发射器一起配合使用实现小车按照预设轨迹巡航运动。
12.更进一步的,所述车底盘上固定有伸缩充电触头插座,小车如需充电通过plc模块的控制,到达指定位置后,伸缩充电触头插座的电动伸缩杆伸出接触充电源,充电停止后电动伸缩杆缩回,小车继续执行清扫任务或者待命。
13.更进一步的,所述顶层防护罩下方安装有多个二维激光传感器,当执行任务时,如果机器人前方或后方遇到障碍物,多个二维激光传感器覆盖360
°
进行测距,携同多个车前一维激光避障传感器和车后一维避障激光传感器反馈信号至控制系统进行逻辑分析,判断是否继续行走或停止。
14.更进一步的,所述顶层防护罩上安装有多个一维定位光电传感器,其与场地内的定点反射板协作,适时的对机器人的定点到位进行纠正。
15.与现有技术相比,本发明所述的一种羊舍推草饲喂机器人的有益效果是:
16.(1)本发明针对这一领域中所涉及的羊舍草料饲喂工作,研制了一种新型羊舍推草饲喂机器人,利用固定在行走底盘上的电机驱动连杆,连杆推拉分段式侧推板,机器人行走的同时,分段式侧推板往复摆动,将散出的草料推回到饲喂栏杆附近,供羊进食。
17.(2)本发明使用简单方便,适时推回饲喂,节能环保,防止草料变质浪费污染羊舍,影响畜羊健康,通过该发明的应用可以实现羊舍草料饲喂的全自动化推回整理方式,在很大程度上提高了工作效率,改善了羊舍的环境条件,降低饲喂成本。
18.(3)本发明的应用可以实现自动化无人管理模式,借助磁条传感器和事先布置在饲喂过道上的磁条对机器人行走进行导航。
19.(4)本发明的机器人动力源采用节能环保型的锂电池组,单次充电8小时可满足负载驱动3小时以上。
20.(5)本发明利用直流减速电机控制机器人的行走和转弯;利用直流减速电机控制机器人的横向推扫动作,机器人行走过程中,使分段式侧推板反复推扫草料,将散出的草料推回到栏杆附件供羊食用。
21.(6)本发明的机器人采用分段式侧推板反复推扫,将羊舍中因畜羊进食过程中头从围栏中伸出进食时带到中间过道的草料及时推送回过道两侧进食位置,进行双侧顺次循环推到,形成往复。
附图说明
22.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
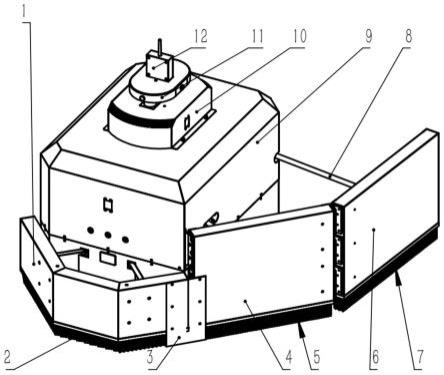
23.图1为本发明所述的一种羊舍推草饲喂机器人的整体外观的轴侧示意图;
24.图2为图1上外壳以上的部分独立放大拆掉部分外壳轴侧示意图;
25.图3为图1拆去上壳以上组件的推板展开最大轴侧示意图;
26.图4为图1拆去上壳以上组件的推板关回最小轴侧示意图;
27.图5为图1仰视底盘示意图;
28.图中附图标记:1-固定前推手、2-前推手下毛刷、3-软过度板、4-摆动推手、5-摆动
推手下毛刷、6-随动推手、7-随动推手下毛刷、8-限位杆机构、9-上外壳、10-桶盖体、11-顶层防护罩、12-天线外壳、13-天线电路板、14-一维光电传感器、15-二维激光传感器、16-急停按钮、17-数码显示屏带串口、18-传感器海绵座、19-刷架支撑板、20-转轴合页、21-连杆安装座、22-传轴、23-鱼眼关节轴承、24-驱动连杆、25-弹性自回位铰链、26-开合限位以及聚氨酯防撞板、27-从动连杆、28-弹性支撑轮、29-转轴滑块、30-防撞弹簧减震机构、31-一维避障激光传感器、32-伸缩充电触头插座、33-驱动动力仓、34-电池仓位扎带、35-锂电池、36-摆动动力源减速电机、37-摆动曲柄、38-电路板安装座、39-避障激光传感器座、40-激光扫码镜头、41-吊带安装杆、42-叫门系统电路板、43-电线定位系统控制电路板、44-一维激光避障传感器、45-拉环吊带仓、46-摆动位置检测接近开关传感器、47-导柱固定板、48-电动伸缩杆安装座、49-电动伸缩杆、50-车体下壳、51-车底盘、52-传感器后安装架、53-磁条传感器、54-驱动轮组、55-前推悬挂支臂、56-传感器前安装架,57-plc控制模块。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.参见图1-5说明本实施方式,一种羊舍推草饲喂机器人,包括车体、固定推手组件、摆动推手组件和随动推手组件,所述车体的前方固定有固定推手组件,通过车体的行走进行推扫,所述固定推手组件与摆动推手组件和随动推手组件依次连接;
31.所述固定推手组件包括固定前推手1和前推手下毛刷2,所述固定前推手1底部安装有前推手下毛刷2,所述摆动推手组件包括摆动推手4、摆动推手下毛刷5和摆动推手驱动组件,所述摆动推手4底部安装有摆动推手下毛刷5,所述摆动推手驱动组件驱动摆动推手4进行侧向清扫,所述随动摆手组件包括随动推手6、随动推手下毛刷7和限位杆机构8,所述随动推手6下方安装有随动推手下毛刷7,所述车体与随动推手6间连接有限位杆机构8。
32.本发明的机器人采用分段式侧推板反复推扫,将羊舍中因畜羊进食过程中头从围栏中伸出进食时带到中间过道的草料及时推送回过道两侧进食位置,进行双侧顺次循环推到,形成往复。
33.所述摆动推手驱动组件包括摆动动力源减速电机36、摆动曲柄37和驱动连杆24,所述摆动动力源减速电机36驱动摆动曲柄37进行椭圆轨迹运动,携同驱动连杆24形成对执行元件的拖拉,形成车体右侧的横向动作清扫。
34.所述摆动推手组件和随动推手组件通过多个弹性自回位铰链25进行连接。
35.所述随动推手组件上连接有弹性支撑轮28,所述弹性支撑轮28为随动摆手组件随动适应地面提供了更佳的弹性支持。
36.推手分成三部分:固定推手组件、摆动推手组件和随动推手组件。
37.车前固定推手组件包括固定前推手1和前推手下毛刷2,通过车体的行走进行推扫。
38.摆动推手组件包括摆动推手4和摆动推手下毛刷5,其组成动作执行元件,依靠摆动动力源减速电机36驱动摆动曲柄37进行椭圆轨迹运动,携同驱动连杆24形成对执行元件的拖拉,形成车体右侧的横向动作清扫。
39.所述随动摆手组件包括随动推手6、随动推手下毛刷7和限位杆机构8,通过三个弹性自回位铰链25将摆动推手组件链接过来进行随动清扫,并且可以本部分受力回收,防止与畜羊头部的硬接触伤害畜羊,并且通过控制侧面两部分推手的展开和收回控制车体横向宽度。红聚氨酯弹性支撑轮28为随动摆手组件随动适应地面提供了更佳的弹性支持。
40.所述车体四角安装有四个驱动轮组54,依靠驱动轮组54的互相配合转动来实现车体完成直线或曲线差速运动,大大减小了运动轨迹转交,更加灵活可靠。
41.所述车体包括车底盘51、上外壳9、桶盖体10、顶层防护罩11、天线外壳12和车体下壳50,所述车底盘51上罩有车体下壳50,所述车体下壳50顶部安装有上外壳9,所述上外壳9上安装有桶盖体10,所述桶盖体10上安装有顶层防护罩11,所述顶层防护罩11上安装有天线外壳12,所述天线外壳12内安装有天线电路板13,所述天线电路板13与电线定位系统控制电路板43连接携同外部场地覆盖的检测系统时时定位车体的位置。
42.所述急停按钮16、数码显示屏带串口17安装在上外壳9的上部,急停按钮16用于机器人的开机上电和关机断电,数码显示屏17用于显示电池电量。
43.所述车底盘51上还装有plc控制模块57,所述车底盘51底部安装有两个磁条传感器53,磁条传感器53能够检测到场地内事先铺设的磁条,使得机器人能够沿着预设磁条巡迹运动。
44.所述车底盘51上固定有伸缩充电触头插座32,小车如需充电通过plc控制模块57控制,到达指定位置后,伸缩充电触头插座32的电动伸缩杆49伸出接触充电源,充电停止后电动伸缩杆49缩回,小车继续执行清扫任务或者待命,
45.所述顶层防护罩11下方安装有多个二维激光传感器15,当执行任务时,如果机器人前方或后方遇到障碍物,多个二维激光传感器覆盖360
°
进行测距,携同多个车前一维激光避障传感器44和车后一维避障激光传感器31反馈信号至控制系统进行逻辑分析,判断是否继续行走或停止。
46.锂电池成组使用放置车底盘51的中部,通过三小一大电池仓位扎带34固定。
47.所述顶层防护罩11侧方安装有二个二维激光传感器15,车前安装三个一维激光避障传感器44和车后安装一个一维避障激光传感器31,用于判断不同的高度有无障碍物。
48.所述顶层防护罩11上安装有多个一维定位光电传感器14,其与场地内的定点反射板协作,适时的对机器人的定点到位进行纠正。
49.激光扫码镜头40读取大门上的二维码标签,识别羊舍门牌号,大门自动打开,机器人自动进入或驶出羊舍。
50.摆动位置检测接近开关传感器46用于判断分段式摆动推手4和随动推手6是否收回。
51.一维光电传感器14和二维激光传感器15用于检测障碍物到机器人的距离。
52.所述一种羊舍推草饲喂机器人的具体操作过程和工作原理:
53.机器人启动后,沿工作路线前进,同时动力源减速电机36通过驱动连杆24驱动摆动推手下毛刷5,往复摆动,将散出的草料退回到栏杆附近,供羊食用。工作结束时,摆动推手下毛刷5和随动推手下毛刷7收回,靠近机体外壳,驶入充电区域自动充电,待机。
54.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改
和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1