一种智能化电动精量开沟施肥机的制作方法
1.本发明涉及农业机械技术领域,特别是涉及一种智能化电动精量开沟施肥机。
背景技术:
2.基于林果业、茶业、花木业等种植园须进行大量深度施肥作业的现实需求,研发智能化电动精量开沟施肥机,起到在绿色环保、无排放和噪声污染的同时提高开沟施肥作业效率和适应能力,提高种植收益的作用。
3.近年来,由于果蔬茶等经济农作物的需求不断扩大,随之而来的是种植园的生产面积的持续增多增大,引发了劳动力的大力需求。但我国经济快速发展,城市化程度提高,农村人口向城市迁移,农村的劳动力所剩不多,从事农业生产的人口减少,但种植园中施肥等种植作业需要大量的劳动力,因此形成了巨大的劳动力缺口。
4.同时,目前果蔬茶种植园仍然大多是非标准设计,且由小户单干承包作业,最初的基础规划差,道路狭窄,大型作业机具无法进入且破坏田地,非常不适用;而市面上的小型开沟机又发展不完善,不能很好满足需要。种植园生产的环节中,开沟施肥工作量占比很大,很多地方采购的机械不足,仍由工人进行此项作业,人工的效率很低且耽误农事农时。因此迫切需要开发机动性能强,对复杂地形的适应性强、功耗较低的轻简型开沟施肥机来提高作业效率,降低生产成本,减轻人工劳动的重担,促进产业持续健康发展。
技术实现要素:
5.为了克服现有技术的不足,本发明的目的是提供一种智能化电动精量开沟施肥机。
6.为实现上述目的,本发明提供了如下方案:
7.一种智能化电动精量开沟施肥机,包括:
8.框架总成;
9.开沟总成,设置在所述框架总成下侧,用于对土地开沟形成施肥沟;
10.施肥装置,内置智能化精量施肥控制系统,设置在所述框架总成上侧,用于根据土地的含肥量和含水量确定肥料的最优用量,并将所述肥料置于所述施肥沟内。
11.优选地,所述开沟总成,包括:
12.开沟刀盘;
13.减速链轮箱,所述减速链轮箱一端与所述开沟刀盘连接;
14.减速器,与所述减速链轮箱的另一端连接;
15.驱动伺服电机,与所述减速器连接,用于驱动减速器转动,进而使减速器通过减速链轮箱带动开沟刀盘旋转。
16.优选地,所述施肥装置,包括:
17.施肥箱,用于存储肥料;
18.施肥管,所述施肥管一端与所述施肥箱连通,所述施肥管的另一端设有施肥器;
19.精准施肥电机,与所述智能化精量施肥控制系统连接,用于根据肥料的最优用量控制所述施肥器的排肥轴转动。
20.优选地,还包括:
21.挡土罩盖,设置在所述框架总成上,用于保护开沟刀盘;
22.三点悬挂拉杆,设置在所述框架总成上,用于推动开沟施肥机完成作业。
23.优选地,所述减速链轮箱,包括:
24.链轮箱壳,内设有小链轮、大链轮,所述小链轮和所述大链轮通过传动链条连接;所述小链轮与所述减速器连接;
25.联轴器,分别与所述开沟刀盘和所述大链轮连接。
26.优选地,所述智能化精量施肥控制系统,包括:
27.样本获取模块,用于获取训练样本;所述训练样本包括土地的原始含肥量、含水量、施肥量及其相应农作物的产量;
28.归一化处理模块,用于对所述训练样本进行归一化处理得到归一化的训练样本;
29.聚类模块,用于对所述归一化的训练样本进行聚类得到多个聚类子集;
30.训练模块,用于将所述聚类子集输入到神经网络中进行训练得到施肥量确定模型;
31.肥料用量确定模块,用于将当前土地的含肥量和含水量输入到所述施肥量确定模型中确定当前土地的肥料用量。
32.优选地,所述聚类模块,包括:
33.目标函数构建单元,用于根据所述归一化的训练样本中的数据点到聚类中心的距离构建目标聚类函数;其中,所述目标聚类函数为:
[0034][0035]
其中,vi表示第i个聚类中心,n表示数据点的总数,表示数据点xj隶属第i个聚类中心的隶属度,d
ij
=||x
j-vi||,d
ij
表示数据点xj到第i个聚类中心的距离,λ表示加权参数;
[0036]
目标函数求解单元,用于对所述目标聚类函数进行迭代求解得到聚类更新模型;
[0037]
聚类单元,用于利用所述聚类更新模型对所述归一化的训练样本进行聚类得到多个聚类子集。
[0038]
优选地,所述聚类更新模型为:
[0039]
[0040]
其中,vi表示第i个聚类中心,m表示可调阈值,d
kj
表示数据点xj到第k个聚类中心的距离。
[0041]
优选地,所述神经网络在训练过程中的激活函数为:
[0042][0043]
其中,x
t
=[x1,x2,
…
xn]
t
表示神经网络的输入矢量,xm表示神经网络第n个输入矢量,ci表示隐含层第i个节点的输出,σi表示第i个基函数的宽度。
[0044]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0045]
本发明提供的一种智能化电动精量开沟施肥机的有益效果在于:与现有技术相比,本发明通过利用开沟总成可以对土地开沟形成施肥沟,然后利用施肥装置可将肥料的最优用量置于施肥沟内,解决了传统开沟机不能在开沟的同时精准施肥的问题。
附图说明
[0046]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0047]
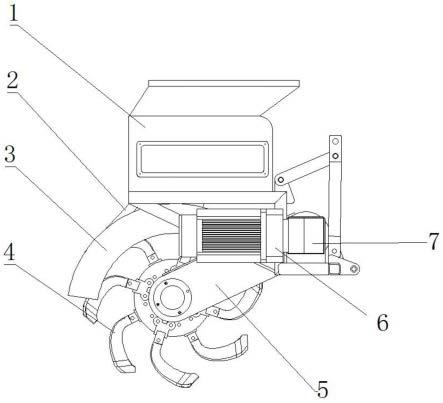
图1为本发明提供的实施例中的一种智能化电动精量开沟施肥机正视图;
[0048]
图2为本发明提供的实施例中的一种智能化电动精量开沟施肥机侧视图;
[0049]
图3为本发明提供的实施例中的一种智能化电动精量开沟施肥机三维结构示意图;
[0050]
图4为本发明提供的实施例中的减速链轮箱示意图。
[0051]
符号说明:
[0052]
1、施肥箱、2施肥管、3挡土罩盖、4开沟刀盘、5减速链轮箱、6驱动伺服电机、7减速器、8框架、9精量施肥电机、10三点悬挂拉杆、501链轮箱壳,502小链轮,503大链轮,504联轴器。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0055]
请一并参阅图1-3,本发明提供的一种智能化电动精量开沟施肥机,包括:框架总成、开沟总成和施肥装置。
[0056]
开沟总成,设置在所述框架总成下侧,用于对土地开沟形成施肥沟;施肥装置,内置智能化精量施肥控制系统,设置在所述框架总成上侧,用于根据土地的含肥量和含水量
确定肥料的最优用量,并将所述肥料置于所述施肥沟内。
[0057]
进一步的,所述开沟总成,包括:开沟刀盘4、减速链轮箱5、减速器7和驱动伺服电机6。
[0058]
减速链轮箱5,所述减速链轮箱5一端与所述开沟刀盘连接;减速器,与所述减速链轮箱5的另一端连接;驱动伺服电机6,与所述减速器7连接,用于驱动减速器7转动,进而使减速器7通过减速链轮箱5带动开沟刀盘4旋转。
[0059]
进一步的,所述施肥装置,包括:施肥箱1、施肥管2和精准施肥电机9。
[0060]
施肥箱1,用于存储肥料;施肥管2,所述施肥管2一端与所述施肥箱1连通,所述施肥管2的另一端设有施肥器;精准施肥电机9,与所述智能化精量施肥控制系统连接,用于根据肥料的最优用量控制所述施肥器的排肥轴转动。
[0061]
需要说明的是,驱动伺服电机和精准施肥电机均由电源驱动,用于带动开沟刀盘和施肥器排肥轴转动,完成开沟施肥作业功能;其中开沟电机输出轴连接减速链轮箱,减速比为5:3,最后连接开沟刀盘,完成开沟动作;本发明中的精量施肥电机可根据预设的最优肥料比例,确定施肥定量,不受外界因素干扰。
[0062]
请参阅图4,所述减速链轮箱5,包括:链轮箱壳501、小链轮502、大链轮503和联轴器504。
[0063]
链轮箱壳501,内设有小链轮502、大链轮503,所述小链轮502和所述大链轮503通过传动链条连接;所述小链轮502与所述减速器7连接;
[0064]
联轴器504,分别与所述开沟刀盘4和所述大链轮503连接。
[0065]
在本发明实施例中,智能化电动精量开沟施肥机还具有:挡土罩盖3和三点悬挂拉杆10。
[0066]
挡土罩盖3,设置在所述框架总成上,用于保护开沟刀盘4;三点悬挂拉杆10,设置在所述框架总成上,用于推动开沟施肥机完成作业。
[0067]
本发明的开沟施肥机还可以通过三点悬挂10直接连接行走主机,由纯电力驱动,不需要手动推开沟施肥机作业。
[0068]
需要说明的是,本发明的智能化精量施肥控制系统,具体包括:
[0069]
样本获取模块,用于获取训练样本;所述训练样本包括土地的原始含肥量、含水量、施肥量及其相应农作物的产量;
[0070]
归一化处理模块,用于对所述训练样本进行归一化处理得到归一化的训练样本;在网络的训练过程中,由于数据属性差异较大,容易导致较大输入抑制较小输入,这样不仅会导致网络的训练速度变慢,甚至还会导致网络无法收敛。为了避免出现以上问题,保持模型的稳定性,使模型达到更好的效果,在使用样本进行训练之前,需要对所述训练样本进行归一化处理。
[0071]
聚类模块,用于对所述归一化的训练样本进行聚类得到多个聚类子集;
[0072]
进一步的,聚类模块,包括:
[0073]
目标函数构建单元,用于根据所述归一化的训练样本中的数据点到聚类中心的距离构建目标聚类函数;其中,所述目标聚类函数为:
[0074]
[0075]
其中,vi表示第i个聚类中心,n表示数据点的总数,表示数据点xj隶属第i个聚类中心的隶属度,d
ij
=||x
j-vi||,d
ij
表示数据点xj到第i个聚类中心的距离,λ表示加权参数。
[0076]
目标函数求解单元,用于对所述目标聚类函数进行迭代求解得到聚类更新模型;其中,聚类更新模型为:
[0077][0078]
其中,vi表示第i个聚类中心,m表示可调阈值,d
kj
表示数据点xj到第k个聚类中心的距离。
[0079]
聚类单元,用于利用所述聚类更新模型对所述归一化的训练样本进行聚类得到多个聚类子集。
[0080]
由于土地的原始含肥量、含水量、施肥量及其相应农作物的产量具有复杂的非线性的关系,因此很难用单一的函数模型对其进行描述,因此本发明采用聚类算法将原始的数据样本首先划分为不同的训练子集,可以有效缩减径向基函数神经网络的中心数目,使得网络的训练更加高效、精确。
[0081]
训练模块,用于将所述聚类子集输入到神经网络中进行训练得到施肥量确定模型;
[0082]
需要说明的是,本发明的神经网络为径向基神经网络,且施肥量确定模型是以土壤肥料含量、水份含量与目标农作物产量为输入,以施肥量作为输出进行训练得到的。其中,径向基神经网络在训练过程中的激活函数为:
[0083][0084]
其中,x
t
=[x1,x2,
…
xn]
t
表示神经网络的输入矢量,xm表示神经网络第n个输入矢量,ci表示隐含层第i个节点的输出,σi表示第i个基函数的宽度。
[0085]
本发明在网络的中心选择上,利用聚类更新模型来计算神经网络的中心数目,然后通过激活函数得到神经网络隐藏层中各个节点的输出,并基于此建立施肥量确定模型,不仅加快了模型的训练速度,同时还能保证模型的预测精度。
[0086]
肥料用量确定模块,用于将当前土地的含肥量和含水量输入到所述施肥量确定模型中确定当前土地的肥料用量。
[0087]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0088]
(1)本发明的智能化电动精量开沟施肥机,由于安装了智能化精量施肥控制系统、开沟和施肥总成,因此可以使用电能为动力进行开沟施肥作业,各个部件之间完全依赖电
力传动,避免了内燃机的排放和噪声污染,减小了机械传动的传递损耗,提高作业质量和效率。
[0089]
(2)精量施肥电机驱动施肥器按设定速度定量排肥,避免了传统机型遇田间沟坎产生的施肥断行和漏缺现象。
[0090]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0091]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1