一种应用于树木的除雪设备的制作方法
1.本发明涉及除雪设备技术领域,尤其涉及一种应用于树木的除雪设备。
背景技术:
2.在冬季,降雪对树木有利有弊,利在于降雪是冬季的一种降水,能够提高土壤墒情,对树木安全越冬大有好处;而弊在于如果积雪过大,不及时进行处理,就会对树木造成损伤,如冻伤或者是压弯、压断大枝,甚至压倒树木,对于树冠比较大的树木更是明显。现有技术中,为了避免积雪压断树枝,都是通过人工手持长杆的方式对积雪进行敲打,使得积雪下落,效率低,力度小,积雪难以完全被清理干净,同时,积雪会四处飘落,难以形成聚拢,尤其是对于临近道路、公共场合的树木,会对道路或公共场所造成积雪堆积,积雪融化后导致地面湿滑,需要进行再次清理。
技术实现要素:
3.针对上述技术中存在的不足之处,本发明提供了一种应用于树木的除雪设备。
4.本发明解决其技术问题所采用的技术方案是:
5.一种应用于树木的除雪设备,包括:
6.行走装置、能够沿所述行走装置的长度方向往复移动的抵推件以及用于推移所述抵推件的第一驱动器;所述抵推件能够抵接于树木,以连动树木摇晃。
7.其中,一预设时间段内,所述第一驱动器向前推移所述抵推件的频率配置成由低变高。
8.优选的,所述抵推件包括抵推体和安装在所述抵推体上的夹爪件;
9.所述夹爪件包括两个相对设置且位于同平面的夹臂,两所述夹臂均枢接于所述抵推体;两所述夹臂中远离所述抵推体的一端均构造为用于夹持树木的臂端,两所述夹臂中的另一端均连接于第二驱动器。
10.优选的,所述行走装置上设置有副座,所述第一驱动器固定于所述副座,所述抵推件可滑动地安装在所述副座上;
11.所述除雪设备还包括位置调整件,所述位置调整件用于对副座进行位置调整;
12.所述对副座进行位置调整包括沿行走装置的长度方向对副座进行位置调整、沿行走装置的宽度方向对副座进行位置调整以及沿行走装置的高度方向对副座进行位置调整中的至少一个。
13.优选的,所述除雪设备还包括用于导落积雪的集雪器,所述集雪器包括用于箍设在树干上的固定部和连接于所述固定部顶侧的集雪部;
14.其中,所述集雪部为锥面状,其横截面积从上至下逐渐减小,所述集雪部与所述固定部间构造有用于漏落积雪的空隙。
15.优选的,所述固定部包括箍体,所述箍体通过连接架固定于所述抵推件;
16.所述箍体包括第一箍体和第二箍体,所述箍体至少具有两种状态:
17.所述第一箍体的两端均与所述第二箍体结合,所述第一箍体和所述第二箍体间构造有孔;
18.所述第一箍体的至少一端与所述第二箍体分离,以形成连通所述孔的豁口。
19.优选的,所述集雪部构造成能够周向闭合的整体,其包括集雪罩,所述集雪罩上设有至少一个可拆分的结合部;
20.所述结合部包括固定在所述集雪罩一端的第一结合部和固定在所述集雪罩另一端的第二结合部;所述第一结合部和所述第二结合部连接时形成所述结合部。
21.优选的,所述除雪设备还包括拢雪器,用于将地面积雪围拢至树根部位;所述拢雪器包括至少一个拢雪组件,所述拢雪组件包括可转动地设于所述行走装置的拢板和用于转动所述拢板的第六驱动器;
22.其中,所述拢板构造成可升降。
23.优选的,所述拢板上设置有压力传感器;所述压力传感器中预设有第一阈值和高于所述第一阈值的第二阈值,所述第一阈值和所述第二阈值间构造成可实施阈值区间;
24.除雪过程中,限定所述压力传感器检测的压力值处于所述可实施阈值区间。
25.优选的,所述行走装置包括车架和至少两个安装于所述车架底部的行走轮组;所述车架包括用于安装所述行走轮组的底架和可升降地连接于所述底架的顶架。
26.优选的,所述行走轮组包括周向均匀构造有轮齿的主动轮、依次排布在所述主动轮后侧的至少两个从动轮以及绕装在所述主动轮和所述从动轮外部的履带,所述履带的带面上均匀设有多个驱动孔,所述轮齿能够对应插入所述驱动孔中;
27.所述车架上安装有至少一个雪橇件;所述雪橇件包括具有上翘式的前端的橇板,所述橇板可转动地设置在所述行走轮组的前侧;
28.所述车架通过第二转轴铰接有调节杆,所述调节杆具有位于所述第二转轴一侧的上段和位于所述第二转轴另一侧的下段;所述橇板经第一转轴铰接于所述下段,所述上段与所述车架间安装有第九驱动器。
29.本发明与现有技术相比,其有益效果是:本发明提供了一种应用于树木的除雪设备,其设置了行走装置、抵推件、集雪器、拢雪器等部件,通过行走装置的设置,能够适应不同的地形的行走,而通过抵推件的设置,能够对树木形成有效的振动,使得积雪在抖动力的作用下掉落至集雪器内,进而通过集雪器将掉落的积雪导向下滑,避免积雪四处飘落;为了进一步保证积雪能够堆积在树木根部,本技术还设置了拢雪器,其能够进一步确保树木周围的积雪被聚拢至树木根部。
附图说明
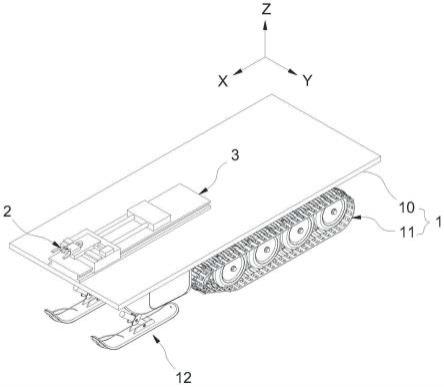
30.图1为一实施例中应用于树木的除雪设备的立体示意图;
31.图2为一实施例中抵推件的结构示意图;
32.图3为一实施例中位置调整件的结构示意图;
33.图4为另一实施例中位置调整件的结构示意图;
34.图5为一实施例中具有集雪器和拢雪器的除雪设备的立体示意图;
35.图6为一实施例中集雪器的俯视示意图;
36.图7为一实施例中行走装置的侧视示意图;
37.图8为一实施例中集雪器的连接位置示意图;
38.图9为一实施例中第一箍体和第二箍体在分离状态下的结构示意图;
39.图10为图9中第一箍体和第二箍体在结合状态下的结构示意图;
40.图11为一实施例中集雪部在展开状态下的结构示意图;
41.图12为图5中除雪设备在拢雪过程中的一状态示意图。
具体实施方式
42.下面结合附图对本发明做进一步地详细说明,以令本领域技术人员参照说明书文字能够据以实施。
43.如图1所示,本发明提供了一种应用于树木的除雪设备,包括行走装置1,该行走装置可以是能够自主行驶或人工驾驶的车辆;为便于说明,定义行走装置1的长度方向为x,宽度方向为y,高度方向为z。
44.行走装置1上设置有能够沿行走装置1的长度方向往复移动的抵推件2,当行走装置1行走至树木侧时,抵推件2可抵接于树根、树干或树枝,抵推件2的往复移动能够连动树木摇晃,进而使树木上附存的积雪脱落至地面。
45.参照图2,本技术的一些实施例中,抵推件2包括抵推体21,抵推体21的侧部设有用于推移抵推体21的第一驱动器22。其中,该第一驱动器22可以通过气缸、电缸、曲柄连杆结构等连动方式驱动抵推体21向前移动。
46.具体的,第一驱动器22可包括第一电机220和固定于第一电机220输出轴上的盘形凸轮221,盘形凸轮221具有能够与抵推体21接触的基部和凸部。一应用场景下,行走装置1调整并固定自身位置,使抵推体21与树木接触,此时盘形凸轮221的基部与抵推体21接触;第一电机220运行后,盘形凸轮221的凸部可向前推移抵推体21,从而树木能够被向前推搡;上述基部再次与抵推体21接触时,树木在自身韧性的作用下复位原状;且当凸部再次与抵推体21接触时树木继续被向前推搡。因此,盘形凸轮221周而复始的转动能够连动树木摇晃,从而使树木上附存的积雪脱落。基于上述结构,第一驱动器22能够通过较少的零部件实现驱动效果,其结构简单且占用空间小,更利于实际应用。
47.为加强对树木的除雪效果,一预设时间段内,第一驱动器22向前推移抵推体21的频率配置成由低变高。可以理解的是,由于积雪具有惯性,固定的推移频率虽能将部分积雪晃落,但依旧有另一部分随树木周期性地摇摆;通过改变对树木的抵推频率能够更有效地使积雪与树木脱离。例如,以12s为一预设时间段,其包括的第一段4s内第一驱动器22以1次/s的晃动频率推移树木,第二段4s内第一驱动器22以2次/s的晃动频率推移树木,第三段4s内第一驱动器22以3次/s的晃动频率推移树木;随后再次重复地进行第一段4s内第一驱动器22以1次/s的晃动频率推移树木,
…
。其中,上述的预设时间及差异化的晃动频率可根据树木种类、树干粗细、树木高度、积雪量等因素适应性调整,本技术中不再进步说明。
48.为使树木能更好地与抵推体21同步,限定抵推件2还包括夹爪件;夹爪件安装在抵推体21上,其能够夹持树木以使抵推体21与树木相对位置固定。一实施例中,该夹爪件可包括两个相对设置且位于同平面的夹臂211,两夹臂211均枢接于抵推体21;两夹臂211中远离抵推体21的一端构造为用于夹持树木的臂端,两夹臂211中的另一端均连接在第二驱动器210上,该第二驱动器210能够改变两夹臂211中另一端间的距离,进而使夹爪件实现张合的
效果。进一步的,第二驱动器210可以是气缸、电缸等驱动件;当然,两夹臂211也可通过本领域其他惯用手段实现张合的运动状态,本技术不做赘述。
49.参照图2,一些实施例中,行走装置1上设置有副座30,其中,第一驱动器22固定于副座30上,抵推件2能够沿行走装置的长度方向在副座30上往复移动。
50.在某些特殊的地形下,行走装置1并不能够很顺利地行驶至使抵推件2抵接于树木的位置。为解决上述问题,上述除雪设备还包括位置调整件3,位置调整件3包括第一基座32,第一基座32沿行走装置的长度方向设有第一轨道320,副座30可滑动地安装在第一轨道320上,且第一基座32还设有用于连动副座30滑移的第三驱动器321;基于上述结构,抵推件2和第一驱动器22能够随副座30沿行走装置的长度方向同步滑移,更利于使抵推件2抵接树木。第三驱动器321可采用气缸、电缸、电机等驱动件。
51.进一步的,位置调整件3还可沿行走装置的宽度方向调整抵推件2,即便行走装置相对树木的走位在宽度方向存在偏差也可通过位置调整件3将抵推件2适当地抵接于树木。
52.参照图3,一实施例中,位置调整件3包括第一基座32,第一基座32沿行走装置的长度方向设有第一轨道320,第一轨道320上可滑动地安装有第二基座31,第三驱动器321用于连动第二基座31沿第一轨道320滑移。第二基座31沿行走装置的宽度方向上设置有第二轨道310,副座30可滑动地安装在第二轨道310上,且第二基座31上还设有用于连动副座30滑移的第四驱动器311;基于上述结构,抵推件2和第一驱动器22能够随副座30沿行走装置的长度方向和/或宽度方向同步滑移;第四驱动器311也可采用气缸、电缸、电机等驱动件。
53.再进一步的,位置调整件3还可沿行走装置的高度方向调整抵推件2,以使抵推件2能够抵接于树木的适当位置。可理解的是,若抵推件2与树木的接触位置靠近树根则摇晃树木的难度较大,且容易损坏树木;若完全接触树枝则整体的除雪效果难以达到最佳;因此,通过在高度方向调整抵推件2,可以使抵推件2尽量地与树干接触,在降低对树木伤害的同时,能够提升除雪效果。
54.参照图4,另一实施例中,位置调整件3包括第一基座32,第一基座32沿行走装置的长度方向设有第一轨道,第一轨道上可滑动地安装有第三基座33,第三驱动器321用于连动第三基座33沿第一轨道滑移。第三基座33沿行走装置的高度方向上设置有第三轨道330,第二基座31可滑动地安装在第三轨道330上,且第三基座33设有用于连动第二基座31的第五驱动器331。同上一实施例,第二基座31上沿行走装置的宽度方向上设置有第二轨道,副座30可滑动地安装在第二轨道上,且第二基座31上还设有用于连动副座30滑移的第四驱动器311;其中,第五驱动器331也可采用气缸、电缸、电机等驱动件。基于上述结构,抵推件2和第一驱动器22能够随副座30沿行走装置的长度方向、宽度方向和高度方向中至少之一进行同步滑移。
55.当然,位置调整件3的具体结构不仅限于上述实施例,其还可选用其它的机械臂结构来直接或间接调整抵推件2的位置,本技术中不作穷举赘述。
56.在抵推件2的作用下,积雪会随机地掉落在地面上,甚至覆盖在行走装置1的表面上。发明人在长期研究过程中发现,如果将积雪规则地堆放在树根部位,不仅占用空间小,便于路人行走,还能够保护树木受冻,在积雪融化时沁润树木。由此,参照图5和图6,上述除雪设备还包括有集雪器4,该集雪器4包括用于箍设在树干上的固定部41和连接于固定部41顶侧的集雪部42;其中,集雪部42为锥面状,其横截面积从上至下逐渐减小,且集雪部42与
固定部41间构造有用于漏落积雪的空隙430。基于以上结构,当积雪落入集雪器4内部时,其能够沿集雪部42向下导落,最后穿过空隙430并堆积在树根处。
57.进一步的,集雪器4可以单独使用,也可以连接在副座30(如图8所示)、第二基座31、第三基座33、抵推件2或行走装置1的其他部位。为使集雪器4能够设置在树干的适当位置,优选将集雪器4设于抵推件2上;由此集雪器4既能够在位置调整件3的作用下随抵推件2移动到适当位置,还能够与抵推件2往复连动,更利于积雪从集雪器4中脱离。
58.值得注意的是,上述记载的箍设不仅可理解为固定部41与树干接触式的连接,还可以理解为固定部41与树干间存在间隙(非接触式)的设计。也就是说,例如当单独使用集雪器4时(集雪器4与行走装置1相互分离),固定部41必然需要接触式的固定在树干上进行支撑;当集雪器4设于抵推件2上时,由于两者能够同步运动,且树木的接触部位也能够同步运动,所以固定部41采用接触式或非接触式连接均可;而当集雪器4设于副座30等行走装置1的其他静止部位时,由于行走装置1位置固定后,副座30等静止部位也处于位置固定状态,此时如果固定部41固定在树干上,会导致集雪器4随树干晃动,容易对集雪器4与行走装置1的连接部位造成损坏,由此必然需要固定部41非接触式的连接树干,同时需要固定部41与树干间的间隙不小于树干在除雪过程中的晃动量。
59.参照图9、图10和图11,一些实施例中,固定部41包括箍体410和用于连接箍体410和行走装置1的连接架4100(当集雪器4单独使用时连接架4100可以弃除),箍体410上构造有多个插套413;集雪部42包括能够对应插装于插套413的多个插杆和连接于多个插杆上的集雪罩420;具体的,插杆包括用于插装于插套413中的第一部4212和用于连接集雪罩420的第二部4211。其中,集雪部42可采用布料、橡胶、塑料等柔性面料,便于拆除集雪部42后对集雪部42收纳整理。
60.进一步的,箍体410包括第一箍体411和第二箍体412,第一箍体411的至少一端构造成能够与第二箍体412分离,以形成能够嵌入树干的豁口415;且当第一箍体411和第二箍体412结合时,两者间构造有能够箍套于树干的孔416。
61.一具体实施例中,第一箍体411和第二箍体412均构造成半圆状,第一箍体411中一端枢接于第二箍体412的一端,第一箍体411中另一端通过锁具414可解除地固定在第二箍体412的另一端。
62.为实现集雪部42为锥面状,插套413可相对竖向向外倾斜地设于箍体410。
63.再进一步的,集雪部42构造成能够周向闭合的整体,如此不仅可以防止积雪从集雪部42侧漏,还能够提升集雪部42的整体强度。参照图6,可以理解的是,集雪部42上构造有至少一个可拆分的结合部4203,结合部4203包括固定在集雪罩420一端的第一结合部4201和固定在集雪罩420另一端的第二结合部4202;其中,第一结合部4201和第二结合部4202可以是粘扣带、磁性条、卡扣、拉链中的之一;第一结合部4201和第二结合部4202连接时形成上述结合部4203,分开时能够对应豁口415便于嵌入树干。
64.上述的集雪部42上构造有至少一个可拆分的结合部4203,可进一步理解为:当集雪罩420为一片时,其首尾结合形成一周向闭合的整体;当集雪罩420为两片以上时,多个集雪罩420依次首尾结合形成一周向闭合的整体。其中,集雪罩420为两片以上时,使用者不必手持集雪罩420的一端绕树木整圈,更便于组装集雪部42。
65.为实现将积雪规则地堆放在树根部位,参照图5和图12,一些实施例中,除雪设备
还包括拢雪器,拢雪器可单独使用或配合集雪器4使用。具体的,拢雪器包括至少一个拢雪组件,上述拢雪组件包括可转动地设于行走装置1的拢板51和用于转动拢板51的第六驱动器50;其中,拢板51的转动轴线基本竖直,第六驱动器50也可采用气缸、电缸、电机等驱动件。再具体的,拢雪器包括两个对称地设置在行走装置1前部的拢雪组件;当两个拢雪组件均向前转动伸出时,参照图12,两个拢雪组件间构造成能够围拢树木t的树根部位的拢雪空间510。
66.为了提升在除雪过程中行走装置1的稳定性,便于抵推件2施力,拢板51构造成可升降。可理解的是,当行走装置1停止行走时,拢板51降低至与地面接触,以稳定除雪过程中的行走装置1;当行走装置1行走时或拢雪过程中,拢板51升高至与地面分离。具体的,拢雪组件还包括用于升降拢板51的第七驱动器,第七驱动器也可采用气缸、电缸、电机等驱动件。一具体的应用场景下,第六驱动器50构造为电机,其具有横截面为矩形的输出轴,拢板51上开设有与上述输出轴对应的传动孔,从而能够实现拢板51沿输出轴上下滑移;第七驱动器构造为电缸,其固定于上述输出轴上,且第七驱动器的伸缩端连接于拢板51。另一具体的应用场景下,第七驱动器构造为电缸,其可转动地安装在行走装置1上,第七驱动器的伸缩端连接于拢板51,第六驱动器50构造为气缸,其一端可沿竖向滑动地枢接于行走装置1,另一端枢接于拢板51以推拉转动拢板51。
67.当然,实现拢板51既能够升降也能够转动的具体结构不仅限于上述应用场景,本技术中不作穷举赘述。
68.为了避免拢板51降低至与地面接触时过度压制地面,拢板51或第七驱动器上设置有压力传感器;压力传感器中预设有第一阈值和高于第一阈值的第二阈值,第一阈值和第二阈值间构造成可实施阈值区间。除雪过程中,当压力传感器检测压力值处于可实施阈值区间时,第七驱动器停止运行;当压力传感器检测压力值高于第二阈值时,第七驱动器向上提升拢板51,直至检测压力值处于可实施阈值区间;当压力传感器检测压力值低于第一阈值时,第七驱动器向下降低拢板51,直至检测压力值处于可实施阈值区间。
69.以下对本技术中的行走装置1进行说明。参照图1,一些实施例中,行走装置1包括车架10和至少两个安装于车架10底部的行走轮组11;抵推件2、副座30、位置调整件3、集雪器4以及拢雪器中至少之一可安装在车架10上。
70.参照图7,一具体实施例中,车架10包括用于安装位置调整件3、拢雪器等器件的顶架100和用于安装行走轮组11的底架;其中,顶架100通过第八驱动器101可升降地连接于底架。第八驱动器101可采用气缸、电缸、电机等驱动件。可以理解的是,一方面,通过升降顶架100能够实现对抵推件2和/或位置调整件3进行高度方向上的调整,从而增大抵推件2在高度上的调整范围;另一方面,通过升降顶架100能够调整51和地面的相对位置(接触或分离)。当然,本实施例中并不能够在所有的应用场景下都可兼顾两个方面的有利面,例如在除雪过程中,顶架100需要降低拢板51至与地面接触,却不能使抵推件2进一步地向上接触树干,或者,顶架100需要结合位置调整件3向上调整抵推件2,却不能使拢板51触地;即便如此,在比较两个方面的重要程度后,顶架100仍然能够作出更有利于除雪的升降动作。
71.值得注意的是,通过应用顶架100的升降结构,可以弃除第七驱动器,从而简化拢板51既能够升降也能够转动的实施方式;当然也可以将顶架100的升降结构与第七驱动器结合使用。
72.由于多降雪地区的路面较为湿滑,且在除雪过程中需要行走装置1具备较高的抓地性能,以保证除雪设备行驶/停泊稳定;继续参照图7,本技术中限定行走轮组11为履带式,该行走轮组11包括周向均匀构造有轮齿的主动轮111、依次排布在主动轮111后侧的至少两个从动轮112,以及绕装在主动轮111和从动轮112外部的履带113;履带113的带面上均匀设有多个驱动孔,轮齿能够对应插入驱动孔中,使得履带113在主动轮111转动时被驱动。具体的,主动轮111可以通过安装在车架10上的燃油机或电机直接驱动,也可加装变速器间接调整主动轮111的转速、传动扭矩等参数。
73.为了提升行走装置1的越障能力,车架10上还安装有至少一个雪橇件12;雪橇件12包括具有上翘式的前端1212的橇板1211,橇板1211沿第一转轴1221可转动地设置在行走轮组11的前侧,上述第一转轴1221优选沿行走装置的宽度方向设置。基于以上结构,在行走过程中,若行走装置1的前方具有高坡,雪橇件12能够引导行走装置1前进,使行走装置1提升适应复杂地形的能力。
74.进一步的,车架10通过第二转轴1222铰接有调节杆122,调节杆122具有位于第二转轴1222一侧的上段和位于第二转轴1222另一侧的下段;其中,橇板1211经第一转轴1221铰接于下段,上段与车架10间安装有第九驱动器123;第九驱动器123可采用气缸、电缸、电机等驱动件。一具体实施例中,第九驱动器123构造为气缸,其一端铰接于车架10,另一端交接于上段。通过第九驱动器123的伸缩动作能够调整橇板1211和地面的相对位置,例如在行驶过程中使橇板1211与地面接触,以引导行走装置1;在除雪过程中,使橇板1211离开地面,提升除雪设备的停泊稳定性。
75.再进一步的,调节杆122构造成上段向前倾斜,即上段构造成相较于下段更靠前;基于此结构,更利于布设雪橇件12的安装位置。例如,另一具体实施例中,第九驱动器123构造为卷扬机,其通过金属链连接于上段,当延伸出卷扬机的部分金属链缩短时,橇板1211能够被降低,当延伸出卷扬机的部分金属链伸长时,橇板1211能够通过与地面接触实现相对于车架10的上升动作。值得注意的是,金属链不提供推力,因此本实施例较难做到使橇板1211离开地面;为提升除雪设备的停泊稳定性,实际应用中将金属链调整到不对调节杆122施加拉力即可,也就是说雪橇件12对车架10不承担支撑力。
76.尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1