基于机器视觉的智能化无人播种、施肥装置及方法
1.本发明涉及机器视觉技术领域,特别涉及一种智能化无人播种、施肥装置及方法。
背景技术:
2.农业机械是指在作物种植业和畜牧业生产过程中,以及农、畜产品初加工和处理过程中所使用的各种机械。农业机械包括农用动力机械、农田建设机械、土壤耕作机械、种植和施肥机械、植物保护机械、农田排灌机械、作物收获机械、农产品加工机械、畜牧业机械和农业运输机械等。
3.近年来,随着智能化与电气化的行业渗透,智能化农机是先进农机研究的热点领域。无人驾驶拖拉机和精密播种机技术发展较快,二者协同作业可以提高作业质量和土地利用率。
4.现有技术中在播种施肥中常见无人机作业方式较多,但是对于无人农机作业相对较少,现有技术中公开了一种基于北斗导航的农业机械自动驾驶控制系统及方法,其公开号为:cn105700533a,公开日:20160622,但并未对进一步实现无人播种、施肥具体实现方法有所说明,尤其是基于机械视觉技术的无人播种、施肥。
技术实现要素:
5.针对现有技术中存在的不足,本发明提供了一种基于机器视觉的智能化无人播种、施肥装置及方法,通过机器视觉技术,实现播种、施肥的快速精确定位,进而实现智能化添种加肥,节省大量人工花费成本,缩短添种加肥的工作时间,大大提高生产效能。
6.本发明的目的是这样实现的:一种基于机器视觉的智能化无人播种、施肥装置及方法,所述装置包括拖拉机,所述拖拉机上配套有北斗卫星导航与车辆控制系统,拖拉机的料斗内安装有送料装置,所述送料装置包括:
7.连接管,连通料斗;
8.第一料管,可转动的安装在连接管的顶端、并与连接管连通;
9.第一动力件,用以驱动第一料管转动;
10.第二料管,其前端安装在第一料管的顶端、并与第一连杆连通;
11.第三料管,安装在第二料管的末端、并与第二料管连通;
12.第四料管,可转动的安装在第三料管的底端、并与第三料管连通;
13.第二动力件,用以驱动第四料管转动;
14.相机,安装在第四料管上,用以拍摄第四料管下方加料位置的图像;
15.所述方法包括以下步骤:
16.步骤1:自带北斗导航系统的拖拉机通过北斗导航系统导航到达加料位置;
17.步骤2:相机拍照配合模板匹配算法定位进料口;
18.步骤3:基于相机获取图像信息,计算出进料口实际坐标,并计算出第一料管、第四料管的旋转角度;
19.步骤4:通过第一动力件驱动第一料管旋转对应角度,通过第二动力件驱动第四料管旋转对应角度,完成与进料口的对接;
20.步骤5:开始加料,将物料从料斗经第一料管、第二料管、第三料管、第四料管加入进料口;
21.步骤6:加料结束,第一料管、第四料管旋转回零,任务结束。
22.作为本发明的进一步限定,所述第二料管的前端铰接在第一料管的顶端,所述第二料管与第一料管的铰接处安装有第三动力件,用以驱动第二料管绕交接点上下摆动。
23.作为本发明的进一步限定,还包括第一编码器,用以读取第一料管的转动角度。
24.作为本发明的进一步限定,还包括第二编码器,用以读取第四料管的转动角度。
25.作为本发明的进一步限定,所述第一动力件和第二动力件均采用直流电机配合齿轮传动件,第一动力件包括安装在料斗上的第一直流电机和套设在第一料管外周的第一齿轮,第一直流电机驱动第一齿轮转动、带动第一料管转动;第二动力件包括安装在第三料管上的第二直流电机和套设在第四料管外周的第二齿轮,第二直流电机驱动第二齿轮转动、带动第四料管转动。
26.作为本发明的进一步限定,先控制第一料管定幅旋转设定角度,通过相机拍照配合模板匹配算法获取进料口附近范围图像信息,找到进料口,若找到进料口则直接进入步骤3,若未找到目标则将第一料管继续旋转设定角度,并重复上述操作,直到相机拍照定位到进料口。
27.作为本发明的进一步限定,步骤3具体为:基于相机拍照获取目标点信息,目标点即进料口,通过模板匹配算法确定目标点在图像上的像素坐标;第一料管与第四料管旋转运动至目标点角度计算方法如下:
28.约定第一料管长度为:l1;第四料管长度为:l2;目标点实际坐标为:(x1,y1);图像中像素坐标为:(u1,v1);图像中心像素坐标(u0,v0);图像中心实际坐标(x0,y0);装置坐标为原点、即第一料管根部:(0,0);第一料管初始最远端到目标点距离为:lr;装置原点到目标点距离为:l’;第一料管转动角度为:θ0;l1与l'夹角为θ2;第四料管转动角度:θ4;θ4的内补角为θ1,θ3;即几何关系有:
[0029][0030][0031]
s1_c=arccos(s1);
[0032]
s2_c=arccos(s2);
[0033]
s3_c=arccos(s3);
[0034]
即,第一料管转动角度:θ0=θ
2-θ1,第四料管转动角度:θ4=θ1+θ3。
[0035]
与现有技术相比,本发明的有益效果在于:
[0036]
(1)本发明采用机器视觉技术自动定位技术,实现无人自行寻找种/肥箱位置,节省了人力与时间;
[0037]
(2)本发明采用图像处理技术,实现自动识别种/肥添加口,稳定高效,精确度高;
[0038]
(3)本发明通过自行设计算法,实现装置自行调整输种/肥转臂位置与角度,对接种/肥口,实用性强。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0040]
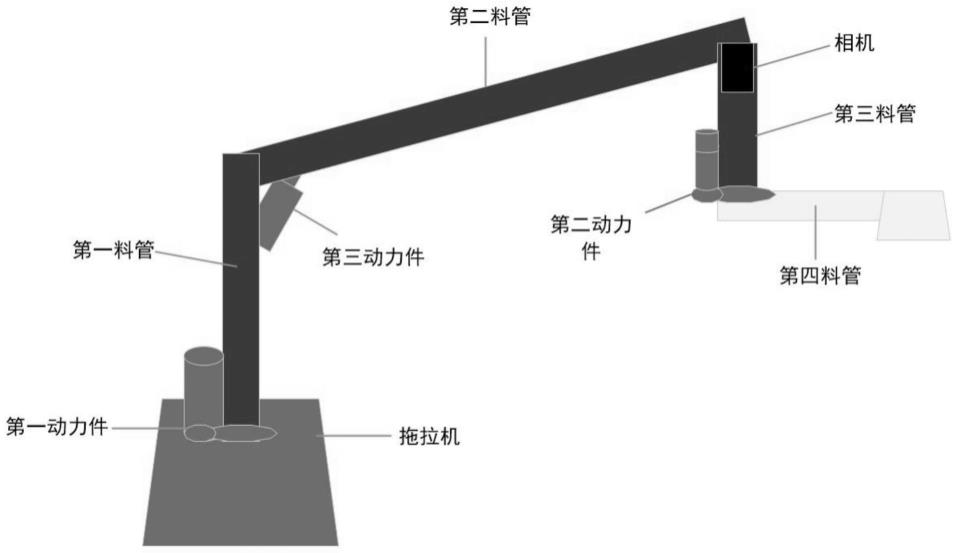
图1为本发明中基于机器视觉的智能化无人播种、施肥装置结构示意图。
[0041]
图2为本发明中基于机器视觉的智能化无人播种、施肥装置实物图(左侧)。
[0042]
图3为本发明中第一料管与第一动力件处实物图。
[0043]
图4为本发明中第一料管与第二料管连接处实物图。
[0044]
图5为本发明中第四料管与第二动力件处实物图。
[0045]
图6为本发明中基于机器视觉的智能化无人播种、施肥方法流程图。
[0046]
图7为本发明中基于机器视觉的智能化无人播种、施肥坐标逻辑示意图。
具体实施方式
[0047]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0048]
实施例1
[0049]
如图1-2所示的一种基于机器视觉的智能化无人播种、施肥装置,包括东方红mf704拖拉机,所述拖拉机上配套有北斗卫星导航(北斗卫星导航可采用背景技术中的技术方案)与车辆控制系统(配合北斗卫星导航控制车辆行驶),拖拉机的料斗内安装有送料装置,送料装置用以将物料从料斗送至进料口。
[0050]
具体的,所述送料装置包括:从料斗至进料口依次连接有连接管、第一料管、第二料管、第三料管、第四料管,连接管与第一料管连接处设有第一动力件,用以驱动第一料管相对连接管转动,第一料管与第二料管的连接处设有第三动力件,用以驱动第二料管相对第一料管作升降摆动,第三料管与第四料管的连接处设有第二动力件,用以驱动第四料管相对第三料管转动,第一料管、第二料管内设有送料装置,本实施例中选用输送绞龙,但并不局限于此结构,任何可实现管道输送的机构均可进行等同替代。
[0051]
工作时,料斗内的物料经连接管=》第一料管=》第二料管=》第三料管=》第四料管,最终从第四料管输出,由于第四料管的出料口置于进料口的上方,从而使得物料可精确的被投送至进料口中。
[0052]
进一步的,如图3所示,第一动力件包括第一直流电机、第一主动齿轮、第一从动齿
轮(即第一齿轮)、第一编码器,第一从动齿轮安装在第一料管的外周,第一料管通过第一轴承组件与连接管相连,第一直流电机安装在料斗上第一直流电机驱动第一主动齿轮转动,第一主动齿轮驱动第一从动齿轮转动,带动第一料管转动,第一编码器用以记录旋转角度。
[0053]
如此结构可实现第一料管的转动,并且记录旋转角度,为后续控制做准备。
[0054]
进一步的,如图4所示,第三动力件包括气缸,第一料管的顶端通过弯头与第二料管的一端相连,第二料管通过第三轴承组件与弯头相连,从而实现第二料管相对于弯头的转动,即上下摆动,气缸的缸体部分铰接在弯头上,气缸的活塞杆部分铰接在第二料管上,通过气缸控制第二料管摆动。
[0055]
如此结构是为了方便在不工作时收起第二料管。
[0056]
进一步的,如图5所示,第二动力件包括第二直流电机、第二主动齿轮、第二从动齿轮(即第二齿轮)以及第二编码器,第二直流电机、第二主动齿轮安装在支架上,第二从动齿轮安装在第四料管的外周,第四料管通过第二轴承组件与第三料管相连,第二直流电机安装在第三料管外部,第二直流电机驱动第二主动齿轮转动,第二主动齿轮驱动第二从动齿轮转动,带动第二料管转动,第二编码器用以记录旋转角度,相机安装在支架上,用以采集图像。
[0057]
如此结构可实现第四料管的转动,并且记录旋转角度,配合相机采集到的图像进行进料口的定位,最终计算出所需旋转角度。
[0058]
实施例2
[0059]
如图6-7所示的一种基于机器视觉的智能化无人播种、施肥方法,采用实施例1所述的基于机器视觉的智能化无人播种、施肥装置,包括以下步骤:
[0060]
步骤1:自带北斗导航系统的拖拉机通过北斗导航系统导航到达加料位置附近,通过气缸控制第二料管升起;
[0061]
步骤2:相机拍照配合模板匹配算法定位进料口;具体为:先通过第一直流电机配合第一编码器控制第一料管旋转10
°
,通过相机拍照配合模板匹配算法获取进料口附近范围图像信息,找到进料口,若找到进料口则直接进入步骤3,若未找到目标则将第一料管继续旋转10
°
,并重复上述操作,直到相机拍照定位到进料口;
[0062]
步骤3:基于相机获取图像信息,计算出进料口实际坐标,并计算出第一料管、第四料管的旋转角度;具体为:基于相机拍照获取目标点信息,目标点即进料口,通过模板匹配算法确定目标点在图像上的像素坐标;第一料管与第四料管旋转运动至目标点角度计算方法如下:
[0063]
约定第一料管长度为:l1;第四料管长度为:l2;目标点实际坐标为:(x1,y1);图像中像素坐标为:(u1,v1);图像中心像素坐标(u0,v0);图像中心实际坐标(x0,y0);装置坐标为原点、即第一料管根部:(0,0);第一料管初始最远端到目标点距离为:lr;装置原点到目标点距离为:l’;第一料管转动角度为:θ0;l1与l'夹角为θ2;第四料管转动角度:θ4;θ4的内补角为θ1,θ3。即几何关系有:
[0064][0065]
[0066]
s1_c=arccos(s1);
[0067]
s2_c=arccos(s2);
[0068]
s3_c=arccos(s3);
[0069]
即,第一料管转动角度:θ0=θ
2-θ1,第四料管转动角度:θ4=θ1+θ3;
[0070]
步骤4:通过第一动力件驱动第一料管旋转角度θ0,通过第二动力件驱动第四料管旋转角度θ4,完成与进料口的对接;
[0071]
步骤5:开始加料,将物料从料斗经第一料管、第二料管、第三料管、第四料管加入进料口;
[0072]
步骤6:加料结束,第一料管、第四料管旋转回零,任务结束。
[0073]
通过实际应用,本发明实现了高精度播种、施肥作业,进而实现智能化添种加肥,节省大量人工花费成本,缩短添种加肥的工作时间,大大提高生产效能。
[0074]
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1