手推式草莓采摘机
1.本发明属于水果采摘技术领域,具体涉及一种手推式草莓采摘机。
背景技术:
2.实现草莓采摘的机械化和自动化是草莓生产环节中一个有待解决的问题。虽然国内外学者对其一直都在进行探索性研究,但目前草莓的采摘自动化程度仍然很低。为了减轻劳动力要求、提高工作效率,欧美等西方国家常采用自动化较高的草莓采摘机器人,虽然可使采摘、切断、采集等工作自动完成,但体积庞大、成本较高,且基本针对高架草莓,对我国地垄种植环境并不适用。另外,常见的辅助人工采摘工具,如指套采摘器、剪刀、简易采果器等,操作者基本仍以蹲姿为主,还不能大幅度减轻劳动强度,采摘效率仍然有限。目前国内外许多学者对草莓采摘机进行了研究。octinion公司的全自动草莓选摘机器人配备有大量的摄像头,自动生成3d图像并进行定位,确定采摘着力点,通过视觉识别技术,机器人可以自行判断草莓是否成熟、成熟度如何,然后再采取行动。如果草莓尚未成熟,机器人根本不会管它。octinion的数据表明,目前机器人可以自行判断和选择出70%的成熟草莓并进行摘取。选摘机器人技术发展成熟,效率高,但是面向的是高架种植园且生产成本高,不适用于我国大部分地区地垄式种植方式的采摘。
3.目前国内大多采用人工采摘的方式,手动采摘劳动强度大,容易伤果,因此采摘效率低,且损果率高。草莓种植过程中采摘草莓是最耗时、最繁琐的一部分,草莓成熟周期短,劳动强度大,使得草莓收获成为一项劳动密集型工作,造成了巨大的人力物力浪费,提高了生产成本,且采摘草莓会因为受到天气与采摘时间等因素的影响。草莓采摘的手工费用约占草莓生产总成本50%左右,这一点极大的制约了草莓植物收益和种植推广的速度。公开号为cn110012726a的中国专利公开了一项发明名称为便携式草莓采摘设备的中国专利,该便携式草莓采摘设备操作简单、实用性强,机器设有两组传送带机构,利用前端勾取器勾取草莓果梗,通过草莓果梗与两组传送带之间的摩擦力运输草莓,通过剪切装置剪断果梗,当草莓运输至收集篮的入口时,两组传送带的间隙增加,草莓便自动掉入收集篮中,有效地解决了草莓采摘困难、果农劳动强度大、草莓易损伤等问题。但是该采摘机浪费体力且效率低,不适用于中大型规模草莓园的采摘。
技术实现要素:
4.本发明的目的在于提出一种手推式草莓采摘机,解决现有技术存在的人工采摘采摘效率低、浪费人力以及机械采摘效率低、不适用地垄式种植方式的采摘的问题。
5.为实现上述目的,本发明的手推式草莓采摘机包括车体框架机构、设置在所述车体框架机构上方的采摘单元、设置在所述车体框架机构上端面的收果盒以及设置在所述车体框架机构下端的行走机构;
6.所述采摘单元包括关于采摘机前进方向左右对称设置的两组,每组包括:
7.支撑在所述车体框架机构上的采摘支撑架;
8.通过所述捕捉系统设置在所述采摘支撑架上的采摘机构,通过所述捕捉系统带动所述采摘机构实现x向、y向和z向的调整;
9.以及转向机构,通过转向机构带动采摘机构绕z轴转动。
10.所述采摘机构包括:
11.一端和所述捕捉系统连接的机械手臂;
12.和所述机械手臂另一端连接的机械手部,所述机械手部至少包括固定手指和活动手指,通过传动系统带动所述活动手指相对固定手指运动,实现夹持或松开;
13.以及设置在所述机械手部上方的剪断装置,所述剪断装置包括一端固定在机械手部末端的气缸以及设置在所述气缸活塞杆端部的刀片,通过所述气缸伸缩运动带动刀片对被夹持的草莓梗切断。
14.所述机械手臂包括:
15.一端和所述捕捉系统连接的沿z向设置的滑块板;
16.以及和所述滑块板另一端固定连接的手臂本体,所述手臂本体相对所述滑块板沿x方向向下倾斜设置。
17.所述机械手部还包括:
18.连接在所述机械手臂一端的手指箱,所述固定手指的一端和所述手指箱内部固定,另一端为固定夹持端,所述活动手指的一端和位于手指箱内的传动系统连接,通过传动系统带动活动手指相对固定手指运动,所述活动手指的另一端为活动夹持端;
19.设置在所述固定手指的固定夹持端的夹持面以及活动手指的活动夹持端夹持面的橡胶;
20.以及设置在所述机械手部的颜色传感器,所述颜色传感器设置在机械手部前端上,将采集的信息传递给51单片机,通过51单片机对采摘单元进行控制。
21.所述传动系统包括:
22.固定在所述手指箱端部的传动电机;
23.设置在所述手指箱内的传动丝杠,所述传动丝杠一端通过联轴器和所述传动电机连接;
24.以及和所述传动丝杠上的螺母固定连接传动滑块,所述传动滑块和所述活动手指的一端固定连接。
25.所述捕捉系统包括:
26.设置在所述采摘单元的采摘支撑架上端部的y向移动机构,所述y向移动机构包括设置在所述采摘支撑架上的y向步进电机,和所述y向步进电机通过带传动连接的沿y向设置的y向丝杠以及和所述y向丝杠通过丝杠螺母副配合的滑块箱,所述滑块箱通过两侧设置的滑轨和所述采摘支撑架滑动配合;
27.和所述y向移动机构的滑块箱下端连接的z向移动机构,所述z向移动机构包括z向步进电机、和所述z向步进电机的输出轴通过联轴器连接的z向丝杠以及和所述z向丝杠平行设置的引导杆,所述采摘机构的机械手臂中的滑块板和所述z向丝杠形成丝杠螺母副,和所述引导杆滑动配合;
28.以及x向移动机构,所述x向移动机构包括液压缸,所述液压缸设置在所述机械手臂的手臂本体上,输出端和所述机械手部的手指箱连接,通过液压缸驱动带动手指箱相对
所述机械手臂伸缩。
29.所述转向机构包括:
30.设置在所述滑块箱上的转向电机;
31.转向传动带机构,所述转向传动带机构的主动轮和所述转向电机的输入轴同轴连接;
32.以及转向传动齿轮机构,所述转向传动齿轮机构的主动齿轮和所述转向传动带机构的从动轮通过第一旋转轴同轴连接,所述转向传动齿轮机构的从动齿轮通过第二旋转轴和所述z向移动机构同轴固定连接。
33.所述车体框架机构包括车底盘以及设置在车底盘行进方向末端的推手。
34.所述行走机构包括:
35.设置在所述车体框架机构的车底盘下端面行进方向前端的两个前轮,所述前轮为转向的万向轮,所述外向轮的外轮面设置有防滑槽;
36.以及设置在所述车体框架机构的车底盘下端面行进方向后端的两个后轮,所述后轮为行走轮。
37.所述草莓采摘机还包括防护板,所述防护板包括两块,分别设置在草莓采摘机行进方向前端和后端,连接在两组采摘单元的采摘支撑架之间。
38.本发明有益效果为:本发明的手推式草莓采摘机采用可拆卸的框架式结构,其梁间通过梁套进行配合连接,小车在两沟垄间前走,并由采摘机构对草莓果实进行采摘。采摘机构是由机械手部、切断部分和机械手臂组成的,可进行对草莓的夹住和剪断,机械手指通过传动电机带动传动丝杠进而实现草莓茎的夹住动作,机械手臂的伸缩可以进行不同高度的摘果,剪断部分是由气缸推动刀片前进将其剪断,完成草莓的采摘。在采摘草莓的过程中,通过捕捉系统沿x轴、y轴和z轴三部分移动机构的调整实现定向。对于采摘草莓完之后,通过转向机构采用带传动和齿轮啮合的方式进行旋转,从而带动采摘机构的旋转将采摘好的草莓运送进收果箱中,完成草莓的收集。针对于垄作栽培的草莓种植模式,两垄间相隔一道宽度,根据这种农艺条件,使用合适宽度的四轮驱动,便于在垄间行走。采摘车行走机构采用了加深防滑槽的防滑轮胎,增大抓地力,并将前轮设为万向轮,以便于转向。本发明轻便易携、效率高、成本低,可有效减轻采摘者劳动强度。
附图说明
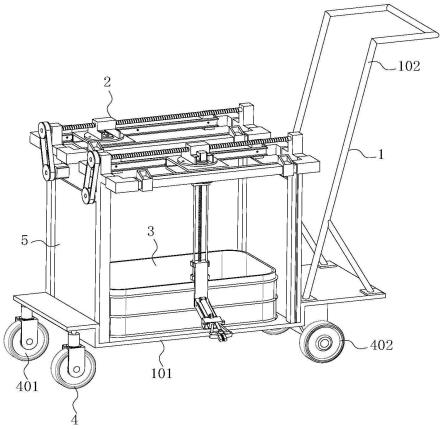
39.图1为本发明的手推式草莓采摘机整体结构示意图;
40.图2为本发明的手推式草莓采摘机中一个采摘单元一个角度结构示意图;
41.图3为本发明的手推式草莓采摘机中一个采摘单元另一个角度结构示意图;
42.图4为本发明的手推式草莓采摘机中采摘机构结构示意图;
43.图5为本发明的手推式草莓采摘机中机械手臂结构示意图;
44.图6为本发明的手推式草莓采摘机中机械手部结构示意图;
45.图7为本发明的手推式草莓采摘机中滑块箱结构示意图;
46.图8为本发明的手推式草莓采摘机中转向机构结构示意图;
47.其中:1、车体框架机构,101、车底盘,102、推手,2、采摘单元,201、采摘支撑架,202、滑块板,203、手臂本体,204、固定手指,205、活动手指,206、手指箱,207、橡胶,208、传
动电机,209、传动丝杠,210、传动滑块,211、气缸,212、刀片,213、y向步进电机,214、带传动,215、y向丝杠,216、滑块箱,217、滑轨,218、z向步进电机,219、z向丝杠,220、引导杆,221、液压缸,222、转向电机,223、转向传动带机构,224、转向传动齿轮机构,3、收果盒,4、行走机构,401、前轮,402、后轮,5、防护板。
具体实施方式
48.下面结合附图对本发明的实施方式作进一步说明。
49.参见附图1-附图8,本发明的手推式草莓采摘机包括车体框架机构1、设置在所述车体框架机构1上方的采摘单元2、设置在所述车体框架机构1上端面的收果盒3以及设置在所述车体框架机构1下端的行走机构4;
50.所述采摘单元2包括关于采摘机前进方向左右对称设置的两组,每组包括:
51.支撑在所述车体框架机构1上的采摘支撑架201;
52.通过所述捕捉系统设置在所述采摘支撑架201上的采摘机构,通过所述捕捉系统带动所述采摘机构实现x向、y向和z向的调整;
53.以及转向机构,通过转向机构带动采摘机构绕z轴转动。
54.所述采摘机构包括:
55.一端和所述捕捉系统连接的机械手臂;
56.和所述机械手臂另一端连接的机械手部,所述机械手部至少包括固定手指204和活动手指205,通过传动系统带动所述活动手指205相对固定手指204运动,实现夹持或松开;
57.以及设置在所述机械手部上方的剪断装置,所述剪断装置包括一端固定在机械手部末端的气缸211以及设置在所述气缸211活塞杆端部的刀片212,通过所述气缸211伸缩运动带动刀片212对被夹持的草莓梗切断。
58.采摘机构是手推式草莓采摘机械装置末端执行器的关键部分,它是直接用于草莓接触的部件,执行人手的功能。采摘机构可以抓取各种形状和大小的果实。在机械手部方面,采用两指结构进行果实的夹住,一指固定,另一指与传动丝杠209配合进行来回运动;当传动电机208工作时,通过联轴器将动力传递给传动丝杠209使其旋转,带动与之配合的活动手指205来回运动,实现机械手部的夹紧、松开的动作;机械手臂的一端设计成斜坡的形状,其跟滑块板202通过螺栓螺母的配合连接,这样机械手部可以斜着对草莓的茎进行夹住,便于颜色传感器的识别和草莓茎的夹紧,改变了以往垂直进去夹住;剪断装置是将其刀片212固定在气缸211活塞杆的前端,当机械手部夹住草莓果实时,活塞杆将前置的刀片212向前推使刀片212切断草莓的茎,完成草莓的切断。此机构可以避免了工人长期弯腰劳动强度过大引起各类不适。为了防止草莓的茎被夹断,在夹持机械手爪处安装柔性橡胶207。
59.所述机械手臂包括:
60.一端和所述捕捉系统连接的沿z向设置的滑块板202;
61.以及和所述滑块板202另一端固定连接的手臂本体203,所述手臂本体203相对所述滑块板202沿x方向向下倾斜设置。
62.所述手臂本体203和所述滑块板202的夹角为45
°
。
63.所述机械手部还包括:
64.连接在所述机械手臂一端的手指箱206,所述固定手指204的一端和所述手指箱206内部固定,另一端为固定夹持端,所述活动手指205的一端和位于手指箱206内的传动系统连接,通过传动系统带动活动手指205相对固定手指204运动,所述活动手指205的另一端为活动夹持端;
65.设置在所述固定手指204的固定夹持端的夹持面以及活动手指205的活动夹持端夹持面的橡胶207;
66.以及设置在所述机械手部的颜色传感器。其安装在机械手指上,识别草莓是否成熟,将采集的信息传递给51单片机,由51单片机对采摘单元进行控制,当草莓为绿色时,草莓采摘机械手臂反向运动退回;当为红色时,草莓采摘机械手臂向成熟草莓靠近进行夹紧,其上置的刀片进行切割,果茎分离,之后草莓采摘机械手臂把草莓运送至收集装置上方,进行草莓的收集。
67.所述传动系统包括:
68.固定在所述手指箱206端部的传动电机208;
69.设置在所述手指箱206内的传动丝杠209,所述传动丝杠209一端通过联轴器和所述传动电机208连接;
70.以及和所述传动丝杠209上的螺母固定连接传动滑块210,所述传动滑块210和所述活动手指205的一端固定连接。
71.所述捕捉系统包括:
72.设置在所述采摘单元2的采摘支撑架201上端部的y向移动机构,所述y向移动机构包括设置在所述采摘支撑架201上的y向步进电机213,和所述y向步进电机213通过带传动214连接的沿y向设置的y向丝杠215以及和所述y向丝杠215通过丝杠螺母副配合的滑块箱216,所述滑块箱216通过两侧设置的滑轨217和所述采摘支撑架201滑动配合;
73.和所述y向移动机构的滑块箱216下端连接的z向移动机构,所述z向移动机构包括z向步进电机218、和所述z向步进电机218的输出轴通过联轴器连接的z向丝杠219以及和所述z向丝杠219平行设置的引导杆220,所述采摘机构的机械手臂中的滑块板202和所述z向丝杠219形成丝杠螺母副,和所述引导杆220滑动配合;
74.以及x向移动机构,所述x向移动机构包括液压缸221,所述液压缸221设置在所述机械手臂的手臂本体203上,输出端和所述机械手部的手指箱206连接,通过液压缸221驱动带动手指箱206相对所述机械手臂伸缩。
75.在草莓成熟时,依然是大量人工在进行手摘工作,每行草莓的种植长度也不近加上人工长时间弯腰工作,不仅腰酸背痛摘果效率也会随之下降,工作效率也会受影响。为了提高摘果效率,草莓采摘的过程中直线运动机构也是一项非常重要的环节,其主要功能分为可对采摘装置x、y和z方向移动,它对草莓采摘的效率起到关键的作用。此本技术的捕捉系统包括x、y和z轴移动机构三部分组成,在y向移动机构方面,由动力源y向步进电机213提供动力,带传动214将动力传递给y向丝杠215使其旋转,与y向丝杠215配合的滑块箱216在y向上进行移动,滑块箱216的两侧安装滑轨217将y向丝杠215的回转运动转化为直线运动;在z向移动机构方面,由动力源z向步进电机218提供动力,联轴器将动力传递给z向丝杠219使其旋转带动滑块板202纵向移动;在x轴部分,通过液压缸221中活塞杆伸缩控制采摘机构的机械手部实现不同高度摘果,也有利于控制好草莓在收集箱中落下的高度,避免高度差
过大引起果皮的损伤。z向移动机构通过轴连接在滑块箱216下面,因此,捕捉系统的设计可以使采摘装置进行多维的方向的运动。y向移动机构可以使采摘装置多面积摘果,z向移动可以将采摘装置升降至不同高度摘果,提高摘果的效率。
76.所述转向机构包括:
77.设置在所述滑块箱216上的转向电机222;
78.转向传动带机构223,所述转向传动带机构223的主动轮和所述转向电机222的输入轴同轴连接;
79.以及转向传动齿轮机构224,所述转向传动齿轮机构224的主动齿轮和所述转向传动带机构223的从动轮通过第一旋转轴同轴连接,所述转向传动齿轮机构224的从动齿轮通过第二旋转轴和所述z向移动机构同轴固定连接。
80.手推式草莓采摘机可以代替人工作业、降低成本和提高摘果效率。当采摘机构完成摘果时,转向机构可以使z向移动机构旋转进行草莓的收集。当进行旋转动作时,由安装在滑块箱216上面的转向电机222提供动力,通过转向传动带机构223和转向传动齿轮机构224将动力传递给z向移动机构随之旋转,采摘机构夹住采摘的草莓旋转至收集箱中,果实收集完时,转向机构会将采摘装置原路返回进行下一步的采摘,以此为重复的动作完成收集。
81.所述车体框架机构1包括车底盘101以及设置在车底盘101行进方向末端的推手102。
82.所述行走机构4包括:
83.设置在所述车体框架机构1的车底盘101下端面行进方向前端的两个前轮401,所述前轮401为转向的万向轮,所述外向轮的外轮面设置有防滑槽;
84.以及设置在所述车体框架机构1的车底盘101下端面行进方向后端的两个后轮402,所述后轮402为行走轮。
85.我国的大部分农田采用垄作栽培的草莓种植模式,两垄间相隔一道宽度,草莓植株种植在垄顶,果实贴在垄坡,并且在垂直垄坡方向上没有重叠;采摘作业过程中除了少许的叶子遮挡外基本没有别的障碍物。根据这种农艺条件,在标准种植区域使用合适宽度的四轮驱动最为合适。本技术的行走机构4适用于垄间空隙为300-350mm,草莓采摘机的行走方式和其他机械的行走方式有所区别,由于垄距和草莓植株的存在,采摘机将只能前后运动和转动,且在转弯时有着最小转弯半径的要求。依据草莓植株的垄距和草莓生长的态势来确定草莓采摘机的行走路线,采摘车的前轮401由一对万向轮组成,减小了采摘机的转弯半径,方便采摘车转向,轮胎专门采用了防滑轮胎,设计的防滑槽可以增大轮胎的抓地力,有效的防止车轮打滑。为了简化结构,降低维修和生产成本,小车的驱动力采用人工推动,并以此来减轻采摘车整体重量。
86.所述草莓采摘机还包括防护板5,所述防护板5包括两块,分别设置在草莓采摘机行进方向前端和后端,连接在两组采摘单元2的采摘支撑架201之间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1