一种应用于食用菌的原料自动化加工调配装置的制作方法
1.本发明涉及一种食用菌原料加工领域,特别是涉及一种用于食用菌的原料自动化加工调配装置。
背景技术:
2.食用菌以其美味与健康成为了人们日常生活中不可或缺的蔬菜品种,我国更是食用菌生产及实用大国,随着对食用菌的需求提高,栽培食用菌已经在全国各地推广,成为广大农民增加收入的好项目。其中,农田里的农作物秸秆可以通过回收加工成为食用菌培养的重要原料,目前多数农户加工秸秆的方式为在地里用铡刀剁碎进行回收,对于培养原料一般也会在地里找个地方人工搅拌,不仅费时费力,而且很容易导致土地里及人身体上的细菌对原料进行污染,因此需要一种自动处理切碎秸秆且污染小的食用菌原材料加工调配装置。
技术实现要素:
3.本发明要解决的技术问题是提供一种自动处理切碎秸秆且污染小的一种应用于食用菌的原料自动化加工调配装置。
4.本发明一种应用于食用菌的原料自动化加工调配装置,包括
5.罐体,其一侧固定有多个罐腿的一端;
6.支撑板,其固定在所述罐体上方;
7.衬板,其固定在所述支撑板上,所述衬板位于铡切刀下方;
8.铡切刀,其安装在所述支撑板上,所述铡切刀能够与所述衬板的上表面搭接。
9.铡切机构,其安装在所述支撑板上,所述铡切机构通过电机驱动凸轮机构实现所述铡切刀上下运动,从而实现对秸秆的铡切。
10.本发明一种应用于食用菌的原料自动化加工调配装置,其中
11.所述铡切机构包括电机、电机输出轴、第一齿轮、第二齿轮、第一转轴、凸轮、第一连板、第一方轴、第一弹簧、第一通孔、第二连板、第三连板;
12.所述罐体与所述电机固定连接,所述电机的电机输出轴与所述第一齿轮同轴固定,所述第一齿轮与所述第二齿轮啮合,所述第二齿轮与所述第一转轴的一端同轴固定,所述第一转杆与所述支撑板轴承连接,所述第一转杆的中部与所述凸轮固定连接,所述凸轮的外圆周面与所述第一连板的上表面搭接,所述第一连板的一端与所述第一方轴的一端固定连接,所述第一方轴配置在所述第一通孔内并沿其移动,所述第一通孔开设在所述第二连板上,所述第二连板的一端与所述支撑板固定连接,所述第二连板的另一端与所述第一弹簧的一端固定连接,所述第一弹簧的另一端与所述第一连板的一端固定连接,所述第一连板的另一端与所述第三连板的一端固定连接,所述第三连板的另一端与所述铡切刀固定连接。
13.本发明一种应用于食用菌的原料自动化加工调配装置,其中
14.所述第一转轴和所述第一连板共同驱动有拌料机构,所述拌料机构包括第一皮带轮、第二皮带轮、第一皮带、第四转轴、第四齿轮、第五齿轮、第五转轴、第四连板、第二方轴、第一方套筒、第一圆套筒、第五连板、第六连板、第六转轴、第七转轴、第六锥齿轮、第七锥齿轮、第二转盘、搅拌爪;
15.所述第一转轴与所述第一皮带轮同轴固定,所述第一皮带轮与所述第二皮带轮通过所述第一皮带带传动连接,所述第二皮带轮与所述第四转轴同轴固定,所述第四转轴通过轴承安装在所述支撑板上,所述第四转轴的中部与所述第四齿轮同轴固定,所述第四齿轮与所述第五齿轮啮合,所述第五齿轮与所述第五转轴的一端同轴固定,所述第五转轴与所述第四连板轴承连接,所述第四连板与所述衬板固定连接,所述第五转轴的另一端与所述第二方轴的一端固定连接,所述第二方轴配置在所述第一方套筒内并沿其移动,所述第一方套筒与所述第六转轴的一端固定连接,所述第一方套筒与所述第一圆套筒轴承连接,所述第一圆套筒与所述第五连板固定连接,所述第五连板与所述第六连板固定连接,所述第六连板与所述第一连板固定连接,所述第六转轴的另一端与所述第七转轴的一端固定连接,所述第七转轴的另一端与所述第六锥齿轮同轴固定,所述第六锥齿轮与所述第七锥齿轮啮合,所述第七锥齿轮与所述第一圆套筒的一端同轴固定,所述第六锥齿轮与所述第二转盘同轴固定,所述第二转盘的外圆周面沿其周向均匀固定有多个所述搅拌爪,所述搅拌爪配置在所述罐体内。
16.本发明一种应用于食用菌的原料自动化加工调配装置,其中
17.所述第二齿轮还驱动有所述上料机构,所述上料机构包括第三齿轮、第一转盘、第一弧形槽、第一曲柄、第一销轴、第二弧形槽、异形板、第一推槽、第二转轴、第三转轴、第一传送带;
18.所述第二齿轮与所述第三齿轮啮合,所述第三齿轮与所述第一转盘同轴固定,所述第一转盘上开设有所述第一弧形槽,所述第一转盘的外圆周面能够与所述第二弧形槽搭接,多个所述第二弧形槽均匀开设在所述异形板上,所述第一转盘与所述第一曲柄的一端固定连接,所述第一曲柄的另一端与所述第一销轴的一端固定连接,所述第一销轴能够配置在所述第一推槽内并沿其移动,多个所述第一推槽均匀开设在所述异形板上,所述第二弧形槽与所述第一推槽间隔设置,所述异形板与所述第二转轴同轴固定,所述第二转轴与所述支撑板轴承连接,所述第二转轴与所述第三转轴通过第一传送带带传动连接,所述第三转轴与所述支撑板轴承连接,所述第一传送带的上表面与所述衬板的上表面平齐。
19.本发明一种应用于食用菌的原料自动化加工调配装置,其中
20.所述第一方轴的截面为矩形,所述第一通孔为与所述第一方轴的截面形状向配合的方形通孔,所述第一方轴配置在方形通孔内并沿其移动。
21.本发明一种应用于食用菌的原料自动化加工调配装置,其中
22.所述第二方轴的截面为矩形,所述第一方套筒为与所述第一方轴的截面形状相配合的矩形套筒,所述第一方轴配置在第一方套筒内并沿其移动。
23.本发明一种应用于食用菌的原料自动化加工调配装置,其中
24.所述第七锥齿轮的上方设置有防护罩,所述防护罩固定安装在所述第一圆套筒上。
25.本发明一种应用于食用菌的原料自动化加工调配装置,其中
26.所述第二弧形槽与所述第一推槽在所述异形板上4等分阵列开设。
27.本发明一种应用于食用菌的原料自动化加工调配装置与现有技术不同之处在于本发明一种应用于食用菌的原料自动化加工调配装置自动处理切碎秸秆,省去了人力成本,并且处理秸秆的容器干净卫生,避免了外界环境对食用菌原料的污染。
28.下面结合附图对本发明的一种应用于食用菌的原料自动化加工调配装置作进一步说明。
附图说明
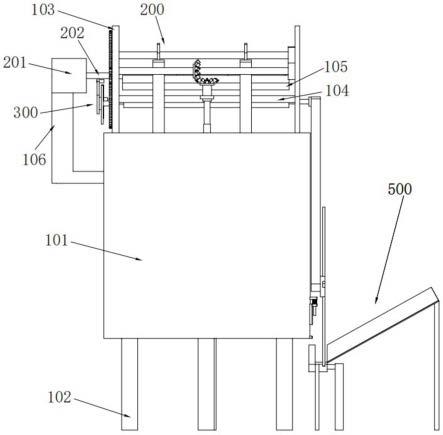
29.图1是一种应用于食用菌的原料自动化加工调配装置的主视图;
30.图2是图1所示一种应用于食用菌的原料自动化加工调配装置的侧视图;
31.图3是图1所示一种应用于食用菌的原料自动化加工调配装置的轴侧图;
32.图4是图1第一视角的局部轴测图;
33.图5是图1第二视角的局部轴测图;
34.图6是图1第三视角的局部轴测图;
35.图7是图1第四视角的局部轴测图;
36.图8是图1第五视角的局部轴测图。
具体实施方式
37.如图1所示,本发明一种应用于食用菌的原料自动化加工调配装置包括罐体101,其一侧固定有多个罐腿102的一端;
38.支撑板103,其固定在所述罐体101上方;
39.衬板105,其固定在所述支撑板103上,所述衬板105位于铡切刀104下方;
40.铡切刀104,其安装在所述支撑板103上,所述铡切刀104能够与所述衬板105的上表面搭接。
41.铡切机构200,其安装在所述支撑板103上,所述铡切机构200通过电机201驱动凸轮机构实现所述铡切刀104上下运动,从而实现对秸秆的铡切。
42.本发明所述电机201通过其输出轴202驱动所述铡切刀104上下运动,使得所述铡切刀104在上下运动的过程中对衬板105上的秸秆进行铡切,从而将较长的秸秆剪切成长度较短的秸秆,实现了秸秆的自动化裁切,节省了人力,且避免了人在操作过程中因为失误导致的一些安全事故,同时避免了人在切割秸秆的时候,人身体上的细菌对秸秆造成污染。
43.其中,所述罐腿102能够平稳放置在地面或其他水平面上。
44.其中,两组所述第一支撑板103关于所述罐体101的中心轴线对称分布。
45.其中,所述凸轮机构包括第一齿轮203、第二齿轮204、第一转轴205、凸轮206、第一连板207、第一方轴208、第一弹簧209、第一通孔210、第二连板211、第三连板212。
46.其中,所述秸秆在剪切前都已经过石灰水的浸泡。
47.本发明通过将剪切前秸秆在石灰水中浸泡,可以保证加工出原料的湿度及ph值符合食用菌培养需求。
48.作为本发明的进一步解释,参见图1、图4,
49.所述铡切机构200包括电机201、电机输出轴202、第一齿轮203、第二齿轮204、第一
转轴205、凸轮206、第一连板207、第一方轴208、第一弹簧209、第一通孔210、第二连板211、第三连板212;
50.所述罐体101与所述电机201固定连接,所述电机201的电机输出轴202与所述第一齿轮203同轴固定,所述第一齿轮203与所述第二齿轮204啮合,所述第二齿轮204与所述第一转轴205的一端同轴固定,所述第一转杆205与所述支撑板103轴承连接,所述第一转杆205的中部与所述凸轮206固定连接,所述凸轮206的外圆周面与所述第一连板207的上表面搭接,所述第一连板207的一端与所述第一方轴208的一端固定连接,所述第一方轴208配置在所述第一通孔210内并沿其移动,所述第一通孔210开设在所述第二连板211上,所述第二连板211的一端与所述支撑板103固定连接,所述第二连板211的另一端与所述第一弹簧209的一端固定连接,所述第一弹簧209的另一端与所述第一连板207的一端固定连接,所述第一连板207的另一端与所述第三连板212的一端固定连接,所述第三连板212的另一端与所述铡切刀104固定连接。
51.本发明所述电机201通过其输出轴202驱动所述铡切刀104上下运动,使得所述铡切刀104在上下运动的过程中对衬板105上的秸秆进行剪切,从而将较长的秸秆剪切成长度较短的秸秆,实现了秸秆的自动化裁切,节省了人力,且避免了人在操作过程中因为失误导致的一些安全事故,同时避免了人在切割秸秆的时候,人身体上的细菌对秸秆造成污染。
52.所述电机201通过其输出轴202带动第一齿轮203转动,通过第一齿轮203与第二齿轮204啮合,带动第二齿轮204转动,从而带动第一转杆205转动,进一步带动凸轮206转动,当凸轮206的凸起部分与第一连板207搭接时,第一连板207向下移动,此时第一弹簧209处于压缩状态,第一连板207的向下移动带动第三连板212向下移动,从而带动铡切刀104向下移动,当凸轮206的非凸起部分与第一连板207搭接时,此时第一弹簧209复位,带动第一连板207向上移动,从而带动第三连板212向上移动,进一步带动铡切刀104向上移动,通过第一凸轮206的转动和第一弹簧209的压缩复位,带动第一连板207上下运动,从而带动第三连板212上下运动,进一步带动铡切刀104上下运动对秸秆进行切割。
53.其中,“所述储料罐与所述电机201固定连接”的方式可为:所述储料罐的罐体101与所述第一弯折杆106的一端固定连接,所述第一弯折杆106的另一端与所述电机201固定连接。
54.其中,“所述第一转杆205的中部与所述凸轮206固定连接”的方式可为:所述第一转杆205的中心轴线与所述凸轮206大径的中心轴线重合。
55.其中,所述凸轮206、第一连板207、第一方轴208、第一弹簧209、第二连板211、第三连板212组成的第一结构体关于所述罐体101的中心轴线对称分布有两组。
56.其中,所述第一方轴208的截面为矩形,所述第一通孔210为与所述第一方轴208的截面形状相配合的方形通孔,所述第一方轴208配置在方形通孔内并沿其移动。
57.本发明通过截面为矩形的第一方轴208和截面为矩形的第一通孔210配合可避免第一方轴208在第一通孔210内移动的时候,第一方轴208相对于第一通孔210转动。
58.其中,所述电机201的电源模块包括电池、电控模块、无线通信模块,所述无线通信模块与用户终端无线连接。
59.本发明通过上述无线通信模块,可让用户直接控制所述电机201的旋转速度,从而控制所述铡切刀104上下移动的频率,进而控制切割秸秆的速度。
60.作为本发明的进一步解释,参见图1、图5,
61.所述第一转轴205和所述第一连板207共同驱动有拌料机构400,所述拌料机构400包括第一皮带轮401、第二皮带轮402、第一皮带403、第四转轴404、第四齿轮405、第五齿轮406、第五转轴407、第四连板408、第二方轴409、第一方套筒410、第一圆套筒411、第五连板412、第六连板413、第六转轴414、第七转轴415、第六锥齿轮416、第七锥齿轮417、第二转盘418、搅拌爪419;
62.所述第一转轴205与所述第一皮带轮401同轴固定,所述第一皮带轮401与所述第二皮带轮402通过所述第一皮带403带传动连接,所述第二皮带轮402与所述第四转轴404同轴固定,所述第四转轴404通过轴承安装在所述支撑板103上,所述第四转轴404的中部与所述第四齿轮405同轴固定,所述第四齿轮405与所述第五齿轮406啮合,所述第五齿轮406与所述第五转轴407的一端同轴固定,所述第五转轴407与所述第四连板408轴承连接,所述第四连板408与所述衬板105固定连接,所述第五转轴407的另一端与所述第二方轴409的一端固定连接,所述第二方轴409配置在所述第一方套筒410内并沿其移动,所述第一方套筒410与所述第六转轴414的一端固定连接,所述第一方套筒410与所述第一圆套筒411轴承连接,所述第一圆套筒411与所述第五连板412固定连接,所述第五连板412与所述第六连板413固定连接,所述第六连板413与所述第一连板207固定连接,所述第六转轴414的另一端与所述第七转轴415的一端固定连接,所述第七转轴415的另一端与所述第六锥齿轮416同轴固定,所述第六锥齿轮416与所述第七锥齿轮417啮合,所述第七锥齿轮417与所述第一圆套筒411的一端同轴固定,所述第六锥齿轮416与所述第二转盘418同轴固定,所述第二转盘418的外圆周面沿其周向均匀固定有多个所述搅拌爪419,所述搅拌爪419配置在所述罐体101内。
63.本发明通过第一转轴205转动驱动搅拌爪419绕第一圆套筒411中心轴线转动的同时自转,同时通过第一连板207的上下移动使得搅拌爪419转动的同时上下移动,对物料进行充分搅拌,省去了人工成本,搅拌更加充分,同时避免了人在搅拌时,人身体携带的细菌对原料的污染。
64.所述第一转轴205转动带动第一皮带轮401转动,从而带动第二皮带轮402转动,进一步带动第四转轴404转动,进而带动第四齿轮405转动,通过第四齿轮405与第五齿轮406啮合,带动第五齿轮406转动,从而带动第五转轴407转动,进一步带动第二方轴409转动,进而带动第一方套筒410转动,通过第一方套筒410转动,带动第六转轴414转动,从而带动第七锥齿轮417转动,进一步带动搅拌爪419绕第一圆套筒411转动,同时由于第六锥齿轮416与第七锥齿轮417啮合,使得搅拌爪419在绕第一圆套筒411转动的同时自转;由于第一连板207上下移动带动第六连板413上下移动,从而带动第五连板412上下移动,进一步带动第一圆套筒411、第一方套筒410、第六转轴414、第七转轴415、第六锥齿轮416、第七锥齿轮417、第二转盘418上下移动,最终带动搅拌爪419转动的同时上下移动。
65.其中,所述第六连板413关于所述第一圆套筒411的中心轴线对称分布有2个。
66.其中,所述第二方轴409的截面为矩形,所述第一方套筒410为与所述第一方轴208的截面形状相配合的矩形套筒,所述第一方轴208配置在第一方套筒410内并沿其移动。
67.本发明通过截面为矩形的第二方轴409和截面为矩形的第一方套筒410配合可使得第二方轴409在第一方套筒410内移动的时候,第一方套筒410跟随第二方轴409同步转动。
68.其中,所述搅拌爪419的数量能够是3个、4个、5个、6个或多个。
69.作为本发明的进一步解释,参见图1、图6,
70.所述第二齿轮204还驱动有所述上料机构300,所述上料机构300包括第三齿轮301、第一转盘302、第一弧形槽303、第一曲柄304、第一销轴305、第二弧形槽306、异形板307、第一推槽308、第二转轴309、第三转轴310、第一传送带311;
71.所述第二齿轮204与所述第三齿轮301啮合,所述第三齿轮301与所述第一转盘302同轴固定,所述第一转盘302上开设有所述第一弧形槽303,所述第一转盘302的外圆周面能够与所述第二弧形槽306搭接,多个所述第二弧形槽306均匀开设在所述异形板307上,所述第一转盘302与所述第一曲柄304的一端固定连接,所述第一曲柄304的另一端与所述第一销轴305的一端固定连接,所述第一销轴305能够配置在所述第一推槽308内并沿其移动,多个所述第一推槽308均匀开设在所述异形板307上,所述第二弧形槽306与所述第一推槽308间隔设置,所述异形板307与所述第二转轴309同轴固定,所述第二转轴309与所述支撑板103轴承连接,所述第二转轴309与所述第三转轴310通过第一传送带311带传动连接,所述第三转轴310与所述支撑板103轴承连接,所述第一传送带311的上表面与所述衬板105的上表面平齐。
72.本发明通过第二齿轮204转动驱动第一传送带311间歇性运动,使得第一传送带311在运动过程中将其上方放置的秸秆间歇性输送至衬板105上,实现了秸秆的自动化输送,节省了人力成本,并且可以使得切割出来的短秸秆长度均匀,符合食用菌原料的标准。
73.所述第二齿轮204通过与第三齿轮301啮合,带动第三齿轮301转动,从而带动第一转盘302转动,进一步带动第一曲柄304转动,通过第一曲柄304转动,带动第一销轴305转动,从而带动异形板307间歇性转动,进一步带动第二转轴309间歇性转动,通过第二转轴309转动带动第一传送带311间歇性运动与第三转轴310间歇性转动,从而实现将第一传送带311上的秸秆间歇性向铡切刀104底部传送;当第一转盘302的外圆周面沿第二弧形槽306内壁移动时,可以固定异形板307的位置,使得异形板307不转动,此时铡切刀104向下运动对秸秆进行加工,当第一销轴305沿第一推槽308移动时,此时异形板307在第一弧形槽303内移动,第一销轴305可以推动异形板307转动,从而使得第一传送带311向前传送运动,将待加工的秸秆传动到铡切刀104底部。
74.其中,所述第一曲柄304的长度方向正对所述第一弧形槽303的中线。
75.本发明通过将第一曲柄304的长度方向与第一弧形槽303的中线方向对齐,可以使得第一销轴305在沿第一推槽308移动时,异形板207刚好转动至第一弧形槽303位置,第一弧形槽303与异形板207存在间隙,避免第一转盘302对异形板307限位。
76.本领域技术人员能够通过调整第二转轴309的直径,调整第一传送带310每次间歇性传动秸秆的距离。
77.作为本发明的进一步解释,参见图1、图4,
78.所述第一方轴208的截面为矩形,所述第一通孔210为与所述第一方轴208的截面形状向配合的方形通孔,所述第一方轴208配置在方形通孔内并沿其移动。
79.本发明通过截面为矩形的第一方轴208和截面为矩形的第一通孔210配合可避免第一方轴208在第一通孔210内移动的时候,第一方轴208相对于第一通孔210转动。
80.作为本发明的进一步解释,参见图1、图5,
81.所述第二方轴409的截面为矩形,所述第一方套筒410为与所述第一方轴208的截面形状相配合的矩形套筒,所述第一方轴208配置在第一方套筒410内并沿其移动。
82.本发明通过截面为矩形的第二方轴409和截面为矩形的第一方套筒410配合可使得第二方轴409在第一方套筒410内移动的时候,第一方套筒410跟随第二方轴409同步转动。
83.作为本发明的进一步解释,参见图1、图5,
84.所述第七锥齿轮417的上方设置有防护罩107,所述防护罩107固定安装在所述第一圆套筒411上。
85.本发明通过设置防护罩107使得上方落下的物料不会落在第六锥齿轮416、第七锥齿轮417上,对齿轮运转产生干涉。
86.作为本发明的进一步解释,参见图1、图6,
87.所述第二弧形槽306与所述第一推槽308在所述异形板307上4等分阵列开设。
88.本发明通过将第二弧形槽306与第一推槽308在异形板307上4等分阵列开设,使得所述异形板307及第二转轴309每次转动90
°
。
89.作为本发明的进一步解释,参见图1、图7、图8,
90.所述第二转轴309还驱动有所述灌装机构500,所述灌装机构500包括第三皮带轮501、第四皮带轮502、第二皮带503、十字推杆504、第一缺口505、第七连板506、第一挡板507、第八连板508、第一支撑杆509、第二缺口510、第一电磁板511、第二销轴512、第二通孔513、第二磁板514、第二弹簧515、第二挡板516、第一限位块517;
91.所述第二转轴309与所述第三皮带轮501同轴固定,所述第三皮带轮501与所述第四皮带轮502通过所述第二皮带503带传动连接,所述第四皮带轮502的一端与所述罐体101轴承连接,所述第四皮带轮502的另一端与所述十字推杆504同轴固定,所述十字推杆504的外端能够配置在所述第一缺口505内并沿其移动,所述第一缺口505开设在所述第一挡板507上,所述第一挡板507与所述第七连板506固定连接,所述第七连板506与所述第八连板508固定连接,所述第八连板508与多个所述第一支撑杆509固定连接,所述第七连板506能够盛放培养盒107,所述培养盒107进料口正上方设置有所述第二缺口510,所述第二缺口510开设在所述罐体101侧壁底部,所述罐体101与所述第一电磁板511固定连接,所述第一电磁板511与所述第二销轴512的一端固定连接,所述第二销轴512的另一端配置在所述第二通孔513内并沿其移动,所述第二通孔513开设在所述第二磁板514上,所述第二磁板514与所述第二弹簧515的一端固定连接,所述第二弹簧515的另一端与所述第一电磁板511固定连接,所述第二磁板514与所述第二挡板516固定连接,所述第二挡板516能够完全挡住所述第二缺口510,第二挡板516下端能够与所述第一限位块517搭接,所述第一限位块517固定安装在所述罐体101上。
92.本发明通过第一电磁板511与第二磁板514的磁力使得第一挡板507间歇性挡住罐体102上的第二缺口510,控制原料流入培养盒107内,同时第二转轴309间歇性转动驱动十字推杆504间歇性转动,使得十字推杆504在转动的过程中,将灌装满的培养盒107推拨至传送带,实现原料自动装入培养盒107,然后自动将灌装满的培养盒107推拨至相应位置,实现培养盒107的自动灌装与输送。
93.所述第二转轴309间歇性转动带动第三皮带轮501间歇性转动,从而带动第四皮带
轮502间歇性转动,进一步带动十字推杆504间歇性转动,当培养盒107与第一挡板507搭接,对第一电磁板511通电,通过磁力使第二磁板514向上移动,从而带动第二挡板516向上移动,原料可以通过第一缺口505流入培养盒107内,此时第二弹簧515处于压缩状态,十字推杆504处于静止状态,当经过一段时间,第一电磁板511断电,与第二磁板514之间没有磁力,此时第二弹簧515复位,带动第二磁板514向下运动,从而带动第二挡板516向下运动,挡住第一缺口505,此时原料不再流出,十字推杆504推拨培养盒107,培养盒107被推送至传送机构111。
94.其中,所述第一电磁板511上设置有电源模块,电源模块包括电池、电控模块、无线通信模块,所述无线通信模块与用户终端无线连接。
95.本发明通过上述无线通信模块,可让用户直接控制所述第二磁板514的开合,同时用户可以在通过电控模块设置预设阈值控制第一电磁板511的通电时间,预设阈值设置为30秒,刚好可以使原料灌满原料盒,预设阈值小于十字推杆504每次转动时间间隔。
96.其中,所述第八连板508从上到下、从远离第七连板506到靠近第七连板506倾斜设置。
97.本发明通过将第八连板508倾斜设置使得第八连板508上的培养盒107滑送至第七连板506。
98.其中,所述第八连板508两侧安装有所述限位板109。
99.本发明通过在第八连板508两侧安装限位板109使得培养盒107只能沿着第八连板508滑落至第七连板506上,无法滑落至其他区域。
100.其中,所述第三皮带轮501、第四皮带轮502直径相同。
101.本发明通过将第三皮带轮501、第四皮带轮502设置相同直径,使得第四皮带轮502每次转动角度为90
°
,保证了十字推杆504每次旋转90
°
将培养盒107推拨至指定位置。
102.其中,所述第七连板506的上表面与传送机构111的上表面平齐。
103.本发明通过第七连板506与传送机构111平齐可以将十字推杆504推拨的培养盒107通过传送机构111传送至指定位置,传送机构111通过第二支撑腿110放置在地面上,所使用的传送机构111为现有技术,本发明不再赘述。
104.其中,所述第一支撑杆509能够放置在地面或其他水平面上。
105.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1