工厂化循环水养鱼自动投饵系统
1.本发明涉及一种鱼饵投喂设备技术领域,特别是涉及一种工厂化循环水养鱼自动投饵系统。
背景技术:
2.水产养殖目前已经规模化,在鱼菜共生系统中,往往有多个养殖池养鱼。目前对养殖水体内的鱼进行投喂普遍是养殖人员手动进行,养殖人员手动进行投喂工作时,一手提着装满鱼饵的饲料桶,然后另一只手从饲料桶内抓起鱼饵,随后用力抛洒鱼饵使鱼饵投入水体内,如此需要养殖人员手动的反复抛洒鱼饵,工作量较大,且养殖人员手动抛洒鱼饵的范围较小,从而鱼饵投喂的范围较小。
3.cn202010739077.6一种水产养殖用可移动鱼饵投喂装置,能实现机械投喂,但是如何将饲料自动送到投喂装置,依然没有解决,需要靠人工将饲料袋里的物料送到投喂装置的料斗。
4.鱼饲料一般是颗粒状,但是为了便于鱼食用,该颗粒的机械强度不强,在输送过程中易受到外力导致挤碎、散开,这样就不方便投喂,不方便鱼儿进食。因此,寻找一种能尽量避免饲料挤碎的输送方式,成为我们要解决的问题。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种工厂化循环水养鱼自动投饵系统,能实现自动给投饵机送料,可以实现鱼饵料的定量自动投放,并且可以尽量避免在输送过程中饵料被挤碎。
6.为了实现本发明的上述目的,本发明公开了一种工厂化循环水养鱼自动投饵系统,包括以下步骤:
7.s1,投饵机移动到投饵位置;
8.s2,投饵机移动到投饵位置后,投饵机向鱼池投饵,完成投饵后向下一鱼池投饵。
9.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
10.s10,令投饵鱼池个数n=0;投饵机上的投饵机料斗装好物料后,执行下一步;
11.s11,获取已投饵id号集合中id号个数,判断已投饵id号集合中id号个数与投饵机所要对应投饵鱼池总个数间的大小关系:
12.若k≥n,k表示已投饵id号集合中id号个数,n表示投饵机所要对应投饵鱼池总个数;则对已投饵id号集合中的id号进行清零;等待下一次对鱼池进行投饵;
13.若k《n,k表示已投饵id号集合中id号个数,n表示投饵机所要对应投饵鱼池总个数;则执行下一步;
14.s12,投饵机控制器向驱动机构发送控制信号,使其投饵机在轨道上移动,当投饵机上的rfid读写器感应到设置在轨道上的rfid标签时,获取该rfid标签所存储的id号,判断该id号是否存在于已投饵id号集合中:
15.若该id号存在于已投饵id号集合中,则说明本次已对该id号所对应的鱼池投饵,n=n+1,执行下一步;
16.若该id号不存在于已投饵id号集合中,则将该id号存储于已投饵id号集合中,n=n+1,同时投饵机控制器向驱动机构发送控制信号,使其投饵机停止移动;执行步骤s2;
17.s13,判断n与n间的大小关系:
18.若n≥n,n表示投饵机所要对应投饵鱼池总个数;等待下一次对鱼池进行投饵;
19.若n《n,n表示投饵机所要对应投饵鱼池总个数;则返回步骤s12。
20.在本发明的一种优选实施方式中,在步骤s2中包括以下步骤:
21.s21,投饵机控制器向旋转电机发送控制信号,旋转电机接收到投饵机控制器发送的控制信号后,旋转电机的输出轴带动旋转轴旋转,进而甩料盘旋转;
22.s22,甩料盘旋转后,投饵机控制器向投饵机上的计量螺旋给料器发送控制信号,计量螺旋给料器接收到投饵机控制器发送的控制信号后,计量螺旋给料器工作,将投饵机料斗中的物料输送到出料筒;
23.s23,投饵机控制器判断投饵量是否达到该鱼池投饵量:
24.若投饵机投饵量未达到该鱼池投饵量,则旋转电机和计量螺旋给料器继续工作,返回步骤s23;
25.若投饵机投饵量达到该鱼池投饵量,则执行下一步;
26.s24,投饵机控制器向投饵机上的计量螺旋给料器发送停止工作信号,计量螺旋给料器接收到投饵机控制器发送的停止工作信号后,计量螺旋给料器停止工作;
27.s25,计量螺旋给料器停止工作后,投饵机控制器向旋转电机发送停止工作信号,旋转电机接收到投饵机控制器发送的停止工作信号后,旋转电机停止工作,进而甩料盘停止旋转;返回步骤s1。
28.在本发明的一种优选实施方式中,在步骤s1之前还包括步骤s0,将料塔中的物料输送进投饵机料斗,将料塔中的物料输送进投饵机料斗的方法包括以下步骤:
29.s31,投饵机移动到送料总管上的送料分管出料口;
30.s32,投饵机移动到送料总管上的送料分管出料口后,物料控制器向风机发送控制信号,风机接收到物料控制器发送的控制信号后,风机工作;
31.s33,风机工作后,物料控制器向鱼类生长期所需物料对应料塔上的旋转给料器发送控制信号,旋转给料器接收到物料控制器发送的控制信号后,旋转给料器工作;
32.s34,旋转给料器工作后,物料控制器向鱼类生长期所需物料对应料塔上的计量螺旋给料器发送控制信号,计量螺旋给料器接收到物料控制器发送的控制信号后,计量螺旋给料器工作;
33.s35,物料控制器判断料塔放饵量是否达到投饵机料斗设定饵量阈值:
34.若料塔放饵量未达到投饵机料斗设定饵量阈值,则风机、旋转给料器和计量螺旋给料器继续工作,返回步骤s35;
35.若料塔放饵量达到投饵机料斗设定饵量阈值,则执行下一步;
36.s36,物料控制器向鱼类生长期所需物料对应料塔上的计量螺旋给料器发送停止工作信号,计量螺旋给料器接收到物料控制器发送的停止工作信号后,计量螺旋给料器停止工作;
37.s37,风机停止工作后,物料控制器向鱼类生长期所需物料对应料塔上的旋转给料器发送停止工作信号,旋转给料器接收到物料控制器发送的停止工作信号后,旋转给料器停止工作;
38.s38,旋转给料器停止工作后,物料控制器向风机发送停止工作信号,风机接收到物料控制器发送的停止工作信号后,风机停止工作。
39.在本发明的一种优选实施方式中,在步骤s0之前还包括,将上塔料斗中的物料输送进料塔,将上塔料斗中的物料输送进料塔的方法包括以下步骤:
40.s41,物料上塔装置移动到物料所对应的料塔处;
41.s42,物料上塔装置移动到物料所对应的料塔处后,物料控制器向物料上塔装置上的旋转给料器发送控制信号,旋转给料器接收到物料控制器发送的控制信号后,旋转给料器工作;
42.s43,旋转给料器工作后,物料控制器向风机发送控制信号,风机接收到物料控制器发送的控制信号后,风机工作;
43.s44,物料控制器判断料塔的物料总存放量是否达到预设物料总存放量阈值:
44.若料塔的物料总存放量达到预设物料总存放量阈值,则执行下一步;
45.若料塔的物料总存放量未达到预设物料总存放量阈值,则旋转给料器和风机继续工作,返回步骤s44;
46.s45,物料控制器向风机发送停止工作信号,风机接收到物料控制器发送的停止工作信号后,风机停止工作;
47.s46,物料控制器向物料上塔装置上的旋转给料器发送停止工作信号,旋转给料器接收到物料控制器发送的停止工作信号后,旋转给料器停止工作。
48.本发明还提供了一种工厂化循环水养鱼自动投饵系统,包括若干鱼池和投饵机,若干鱼池的上方铺设有供投饵机移动的轨道,所述投饵机能在轨道上移动至每个鱼池的中心的上方,还包括自动送料系统,所述自动送料系统包括料塔,所述料塔的底部设置有出料口,还包括物料上塔装置以及风送装置,在所述出料口上设置有计量螺旋给料器,所述计量螺旋给料器的出料口连接旋转给料器的上端进料口,所述风送装置包括送料总管和风机,所述旋转给料器的下端出料口与送料总管中部相连,所述送料总管的一端连接风机,另一端设置与投饵机相连的连接口;
49.所述投饵机包括投饵机料斗,所述送料总管与投饵机料斗的进料口相连,所述投饵机料斗的下端出料口上也设置有计量螺旋给料器,所述投饵机的计量螺旋给料器的出料口的下端连接出料筒,所述出料筒的下方设置有甩料盘,所述甩料盘的中部设置有向上延伸的旋转轴,所述旋转轴与位于出料筒内中心的旋转电机的输出轴相连。
50.饵料存放在料塔内,通过计量螺旋给料器出料,可以根据计量螺旋给料器的螺旋旋转的圈数,计量饵料的重量,然后饵料通过旋转给料器,进入送料总管,通过鼓风输送到投饵机对每个鱼池进行投料。旋转给料器是通过电机减速机的传动将一个带有等分结构的叶轮在壳体内旋转,从壳体上部进料,进入叶轮的两个叶片之间,然后旋转,从壳体的下端卸除。采用旋转给料器,在叶轮的作用下,可以避免送料总管内的风通过给料器跑出(叶片与壳体的间隙很小,类似于间隙配合,保证能旋转就行),从而避免风送总管内失压。
51.饵料通过鼓风机送到投饵机的投饵机料斗,通过计量螺旋给料器计量进入每个鱼
池内的饵料的重量,实现定量投喂。计量螺旋给料器出来的饵料穿过出料筒,落入甩料盘内,通过旋转的甩料盘将饵料均匀抛洒在鱼池内,甩料盘可以扩大投料面积。
52.在本发明的一种优选实施方式中,所述旋转给料器包括壳体,在壳体的顶端设置有进料口,底端设置有出料口,所述壳体内设置有叶轮,所述叶轮上等分分布有叶片,所有叶片的中上部朝一个方向弯曲成圆弧段。传统的旋转给料器的叶片为直的叶片,在输送过程中,会打坏饵料,让饵料散开,本发明将叶片的中上部设计成圆弧形,有效解决了该问题,饵料在输送中不会被打散。
53.在本发明的一种优选实施方式中,所述圆弧段的切线与其进料口壁的夹角度数45
°
~70
°
之间。既不影响输送的空间,也不会出现饵料被挤碎的现象。
54.在本发明的一种优选实施方式中,所述旋转给料器的上端进料口和下端出料口上分别设置有连接法兰盘。方便连接。
55.在本发明的一种优选实施方式中,所述送料总管的连接口上设置有多通接头,在多通接头的每个出口上连接送料分管。可以实现给多台投饵机上料。提高效率。
56.在本发明的一种优选实施方式中,所述物料上塔装置包括上塔料斗,所述上塔料斗的底部出料口与旋转给料器的进料口相连,所述旋转给料器的出料口与上塔料管中部连接,所述上塔料管的一端能伸到料塔的顶端,另一端与风机相连。饵料放入较矮小的上塔料斗,然后存放在大的料塔内,旋转给料器的作用一方面是为了给料,另一方面也是为了避免上塔料管内的压力减小。
57.在本发明的一种优选实施方式中,所述风机的出口管线上设置有三通阀门,所述三通阀门的其中两个出口分别与上塔料管和送料总管相连。这样可以实现一台风机转换成上料或者送料。
58.在本发明的一种优选实施方式中,所述上塔料斗的下方设置有支撑架,所述支撑架上设置有行走轮。方便移动上塔料斗。
59.在本发明的一种优选实施方式中,所述料塔为四个,所述送料总管上对应四个料塔分别设置有进料口。鱼的幼苗期、成长期需要投喂不同的饵料,通过多个料塔分别存放不同的饵料,根据需要打开相应的料塔进行投喂。
60.在本发明的一种优选实施方式中,所述投饵机的计量螺旋给料器的下端出料口通过法兰盘与出料筒相连,所述旋转电机安装在出料法兰的中心,所述出料法兰与出料筒下端设置的法兰盘相连,并且旋转电机伸到出料筒内,所述旋转电机的顶端设置有锥形帽尖。设置锥形帽尖,避免电机的顶部有饵料落不下来,从而导致定量投放不准确。
61.在本发明的一种优选实施方式中,在每个投饵机顶部均设置有用于固定安装rfid读写器的rfid读写器支架,rfid读写器固定安装在rfid读写器支架上,读写器的数据端与投饵机控制器的rfid数据端相连,在所述轨道上设置有用于固定安装rfid标签支架,rfid标签固定安装在rfid标签支架上;当投饵机到达鱼池中心的上方时,rfid读写器可以读取到rfid标签,rfid标签中存储有对应鱼池的id号。
62.在本发明的一种优选实施方式中,所述轨道的下端滑动连接有两块滑块,两块滑块能通过驱动机构驱动沿着轨道移动,两块滑块的下端之间设置有连接横梁,所述投饵机吊装在连接横梁下方。通过驱动机构驱动滑块移动,从而实现投饵机沿着轨道移动。
63.综上所述,由于采用了上述技术方案,本发明能够通过风力在密闭的管道内输送
饵料,尽量避免饵料在输送过程中受损,采用计量螺旋给料器,可以准确计量去投喂装置的饵料的量,以方便实现定量投喂;计量螺旋给料器的下端设置旋转给料器,避免送料总管的压力减小,本发明设计的旋转给料器还能避免给料器本身给饵料带来的损害,避免饵料挤碎。通过投饵机的计量螺旋给料器实现定量投喂。
64.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
65.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
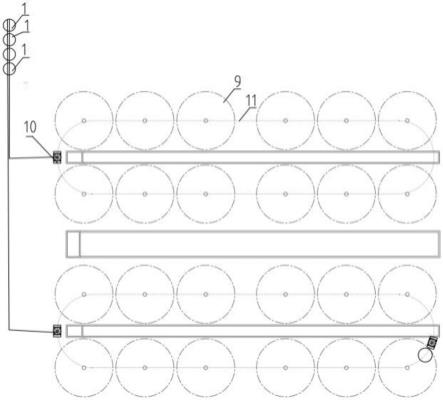
66.图1是本发明饵料自动投喂系统的平面示意图。
67.图2是本发明自动送料系统的结构示意图。
68.图3是图2中a处的局部放大示意图。
69.图4是图2中b处的局部放大示意图。
70.图5是图2中c处的局部方大示意图。
71.图6是图2中d处局部放大示意图。
72.图7是投饵机结构示意图。
73.图8是投饵机在轨道上的安装示意图。
具体实施方式
74.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
75.实施例1,如图1~8所示,工厂化循环水养鱼自动投饵系统,包括若干鱼池9、投饵机10和自动送料系统。
76.在若干鱼池9的上方铺设有供投饵机10移动的轨道11,也就是通过轨道11能到若干鱼池9的每个鱼池的上方。如若干鱼池并排设置或围成一圈,图中画出的是围成一个圆环。图1中,我们将养殖场的鱼池围成两个圆环,每个圆环配一台投饵机10。
77.投饵机10包括投饵机料斗101和设置在投饵机10内的投饵机pcb电路板,投饵机pcb电路板上设置有投饵机控制器和投饵机无线模块,投饵机控制器的无线数据端与投饵机无线模块的无线数据端相连,投饵机料斗101的底部为锥形,其顶端设置有连接吊耳,投饵机料斗101的下端出料口上设置有计量螺旋给料器2,投饵机上的计量螺旋给料器的工作控制端与投饵机控制器的工作控制端相连,投饵机10的计量螺旋给料器2的出料口的下端连接出料筒102,出料筒102的下方设置有甩料盘103,甩料盘的直径大于出料筒102。甩料盘103的中部设置有向上延伸的旋转轴104,旋转轴104与位于出料筒102内中心的旋转电机105的输出轴相连,旋转电机105的工作控制端与投饵机控制器的电机工作控制端相连。具体的投饵机的计量螺旋给料器的下端出料口通过法兰盘与出料筒相连,旋转电机105安装在出料法兰106的中心,出料法兰106与出料筒102下端设置的法兰盘相连,并且旋转电机105伸到出料筒102内,旋转电机105的顶端设置有锥形帽尖107。
78.轨道11的下端滑动连接有两块滑块12,两块滑块12能通过驱动机构驱动沿着轨道11移动,驱动机构的工作控制端与投饵机控制器的驱动机构工作控制端相连,此为现有技术,在此对驱动机构不做赘述。两块滑块12的下端之间设置有连接横梁13,投饵机10通过连接吊耳吊装在连接横梁13下方。在每个投饵机顶部均设置有用于固定安装rfid读写器的rfid读写器支架,rfid读写器固定安装在rfid读写器支架上,读写器的数据端与投饵机控制器的rfid数据端相连,在所述轨道上设置有用于固定安装rfid标签支架,rfid标签固定安装在rfid标签支架上;当投饵机到达鱼池中心的上方时,rfid读写器可以读取到rfid标签,rfid标签中存储有对应鱼池的id号。
79.自动送料系统,包括料塔1物料上塔装置以及风送装置,料塔1的底部设置有出料口,根据鱼类在不同的生长期可能涉及到不同的饵料,我们将料塔1设计成四个,用于盛放不同的饵料。料塔1的顶端有进料口,底端为锥形,方便出料。料塔上设置有料塔pcb电路板,在料塔pcb电路板上设置物料控制器和物料无线连接模块,物料控制器的无线数据端与物料无线连接模块的无线数据端相连。为了便于计量料塔的物料储放量,在每个料塔内设置有位置高度不同的多个物料感应器,处于最高处的物料感应器为第一物料传感器,各个第一物料传感器的数据端分别对应于物料控制器的位置感应端相连,处于最低处的物料感应器为第二物料传感器,各个第二物料传感器的数据端分别对应于物料控制器的位置感应端相连,当其第一物料传感器感应到物料时,表明物料达到料塔的最高限位高度;当其第二物料传感器未感应到物料时,表明物料达到料塔的最低限位高度。
80.在料塔1的出料口上设置有计量螺旋给料器2,计量螺旋给料器2的出料口连接旋转给料器3的上端进料口。与各个料塔相连的计量螺旋给料器分别与物料控制器的对应计量控制端相连,通过计量螺旋给料器与各个料塔相连的旋转给料器与物料控制器的对应给料控制端相连,旋转给料器3包括壳体301,在壳体301的顶端设置有进料口,底端设置有出料口,壳体内设置有叶轮302,叶轮302上等分分布有叶片303,所有叶片303的中上部朝一个方向弯曲成圆弧段304。圆弧段304的末端与壳体的内壁间隙配合,此点为现有技术,意思是只要能满足旋转的需求即可,间隙非常小。圆弧段的切线与其进料口壁的夹角a度数45
°
~70
°
之间。旋转给料器3的上端进料口和下端出料口上分别设置有连接法兰盘305。图中,旋转给料器3的下端出料口的法兰盘与接头306相连,接头306的上侧设置有进料口,进料口上设置有法兰盘305,接头306通过法兰盘305与旋转给料器3下端的法兰盘305相连,接头306的靠近下端的左右两侧分别设置有与管道相连的接口307,用于与送料总管或上塔料管相连。
81.风送装置包括送料总管4和风机5,风机与物料控制器的风机控制端相连,旋转给料器3的下端出料口与送料总管4中部相连,具体通过接口307相连,送料总管4上对应四个料塔分别设置有进料口。送料总管4的一端连接风机5,另一端设置与投饵机的投饵机料斗的进料口相连的连接口。送料总管4的连接口上设置有多通接头6,在多通接头的每个出口上连接送料分管。图中为三通接头,可以为两台投饵机提供饲料。
82.物料上塔装置包括上塔料斗7,上塔料斗7顶端有进料口,底端为锥形。上塔料斗7的底部出料口与旋转给料器3的进料口相连,物料上塔装置上的旋转给料器与物料控制器的上料控制端相连,旋转给料器3的出料口与上塔料管8中部连接,具体通过接口307相连,上塔料管8的一端能伸到料塔1的顶端,另一端与风机5相连。风机5的出口管线上设置有三
通阀门,三通阀门的其中两个出口分别与上塔料管8和送料总管4相连。为了方便行走,上塔料斗7的下方设置有支撑架,支撑架上设置有行走轮。在物料上塔装置上还设置有物料rfid读写器,物料rfid读写器的数据端与物料控制器的rfid数据端相连,对应的在每个料塔上设置有物料rfid标签,物料rfid标签内存储有该料塔应储放鱼类物料类型,根据rfid读写器读取rfid标签存储的信息,获得物料上塔装置应向料塔上何种物料。
83.本发明公开了一种工厂化循环水养鱼自动投饵系统的工作方法,包括以下步骤:
84.s1,投饵机移动到投饵位置;
85.s2,投饵机移动到投饵位置后,投饵机向鱼池投饵,完成投饵后向下一鱼池投饵。
86.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
87.s10,令投饵鱼池个数n=0;投饵机上的投饵机料斗装好物料后,执行下一步;
88.s11,获取已投饵id号集合中id号个数,判断已投饵id号集合中id号个数与投饵机所要对应投饵鱼池总个数间的大小关系:
89.若k≥n,k表示已投饵id号集合中id号个数,n表示投饵机所要对应投饵鱼池总个数;则对已投饵id号集合中的id号进行清零;等待下一次对鱼池进行投饵;
90.若k《n,k表示已投饵id号集合中id号个数,n表示投饵机所要对应投饵鱼池总个数;则执行下一步;
91.s12,投饵机控制器向驱动机构发送控制信号,使其投饵机在轨道上移动,当投饵机上的rfid读写器感应到设置在轨道上的rfid标签时,获取该rfid标签所存储的id号,判断该id号是否存在于已投饵id号集合中:
92.若该id号存在于已投饵id号集合中,则说明本次已对该id号所对应的鱼池投饵,n=n+1,执行下一步;
93.若该id号不存在于已投饵id号集合中,则将该id号存储于已投饵id号集合中,n=n+1,同时投饵机控制器向驱动机构发送控制信号,使其投饵机停止移动;执行步骤s2;
94.s13,判断n与n间的大小关系:
95.若n≥n,n表示投饵机所要对应投饵鱼池总个数;等待下一次对鱼池进行投饵;
96.若n《n,n表示投饵机所要对应投饵鱼池总个数;则返回步骤s12。
97.在本发明的一种优选实施方式中,在步骤s2中包括以下步骤:
98.s21,投饵机控制器向旋转电机发送控制信号,旋转电机接收到投饵机控制器发送的控制信号后,旋转电机的输出轴带动旋转轴旋转,进而甩料盘旋转;
99.s22,甩料盘旋转后,投饵机控制器向投饵机上的计量螺旋给料器发送控制信号,计量螺旋给料器接收到投饵机控制器发送的控制信号后,计量螺旋给料器工作,将投饵机料斗中的物料输送到出料筒;
100.s23,投饵机控制器判断投饵量是否达到该鱼池投饵量:
101.若投饵机投饵量未达到该鱼池投饵量,则旋转电机和计量螺旋给料器继续工作,返回步骤s23;
102.若投饵机投饵量达到该鱼池投饵量,则执行下一步;
103.s24,投饵机控制器向投饵机上的计量螺旋给料器发送停止工作信号,计量螺旋给料器接收到投饵机控制器发送的停止工作信号后,计量螺旋给料器停止工作;
104.s25,计量螺旋给料器停止工作后,投饵机控制器向旋转电机发送停止工作信号,
旋转电机接收到投饵机控制器发送的停止工作信号后,旋转电机停止工作,进而甩料盘停止旋转;返回步骤s1。
105.在本发明的一种优选实施方式中,在步骤s1之前还包括步骤s0,将料塔中的物料输送进投饵机料斗,将料塔中的物料输送进投饵机料斗的方法包括以下步骤:
106.s31,投饵机移动到送料总管上的送料分管出料口;
107.s32,投饵机移动到送料总管上的送料分管出料口后,物料控制器向风机发送控制信号,风机接收到物料控制器发送的控制信号后,风机工作;
108.s33,风机工作后,物料控制器向鱼类生长期所需物料对应料塔上的旋转给料器发送控制信号,旋转给料器接收到物料控制器发送的控制信号后,旋转给料器工作;
109.s34,旋转给料器工作后,物料控制器向鱼类生长期所需物料对应料塔上的计量螺旋给料器发送控制信号,计量螺旋给料器接收到物料控制器发送的控制信号后,计量螺旋给料器工作;
110.s35,物料控制器判断料塔放饵量是否达到投饵机料斗设定饵量阈值:
111.若料塔放饵量未达到投饵机料斗设定饵量阈值,则风机、旋转给料器和计量螺旋给料器继续工作,返回步骤s35;
112.若料塔放饵量达到投饵机料斗设定饵量阈值,则执行下一步;
113.s36,物料控制器向鱼类生长期所需物料对应料塔上的计量螺旋给料器发送停止工作信号,计量螺旋给料器接收到物料控制器发送的停止工作信号后,计量螺旋给料器停止工作;
114.s37,风机停止工作后,物料控制器向鱼类生长期所需物料对应料塔上的旋转给料器发送停止工作信号,旋转给料器接收到物料控制器发送的停止工作信号后,旋转给料器停止工作;
115.s38,旋转给料器停止工作后,物料控制器向风机发送停止工作信号,风机接收到物料控制器发送的停止工作信号后,风机停止工作。
116.在本发明的一种优选实施方式中,在步骤s0之前还包括,将上塔料斗中的物料输送进料塔,将上塔料斗中的物料输送进料塔的方法包括以下步骤:
117.s41,物料上塔装置移动到物料所对应的料塔处;
118.s42,物料上塔装置移动到物料所对应的料塔处后,物料控制器向物料上塔装置上的旋转给料器发送控制信号,旋转给料器接收到物料控制器发送的控制信号后,旋转给料器工作;
119.s43,旋转给料器工作后,物料控制器向风机发送控制信号,风机接收到物料控制器发送的控制信号后,风机工作;
120.s44,物料控制器判断料塔的物料总存放量是否达到预设物料总存放量阈值:
121.若料塔的物料总存放量达到预设物料总存放量阈值,则执行下一步;
122.若料塔的物料总存放量未达到预设物料总存放量阈值,则旋转给料器和风机继续工作,返回步骤s44;
123.s45,物料控制器向风机发送停止工作信号,风机接收到物料控制器发送的停止工作信号后,风机停止工作;
124.s46,物料控制器向物料上塔装置上的旋转给料器发送停止工作信号,旋转给料器
接收到物料控制器发送的停止工作信号后,旋转给料器停止工作。
125.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1