一种基于AI技术的插秧机实用调头系统及方法与流程
一种基于ai技术的插秧机实用调头系统及方法
技术领域
1.本发明涉及ai领域,具体为一种基于ai技术的插秧机实用调头系统及方法。
背景技术:
2.我国为农业大国,人口数量庞大,但从事农业种植的青年少之又少,为保农业发展的可持续性,我国精细农业和农业智能化正在迅速发展。
3.传统的插秧机种植方面,通常配备2至3个人手,一个驾驶员,两个上苗员,而装载了gnss(global navigation satellite system)高精度农机自动驾驶系统的,可实现两个配备人手种植即可,免去了驾驶员的配备人手,目前该系统已相当成熟,各家市场表现稳定,仅需打ab点设直线即可使用,但换挡调头及插植部升降方面,仍需人工干预及提前识别,存在缺陷和不便利性。为了实现农机驾驶真正的全自动化,并令其精确识别地头种植点和收编点,让农田得到更大的利用,农田种植更为标准化,使人力成本得到更大优化,因此设计基于视觉识别、自动电控换挡、电控提升、边界自动识别、报警转弯的系统方法。
技术实现要素:
4.本发明的目的在于提供一种基于ai技术的插秧机实用调头系统及方法,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:
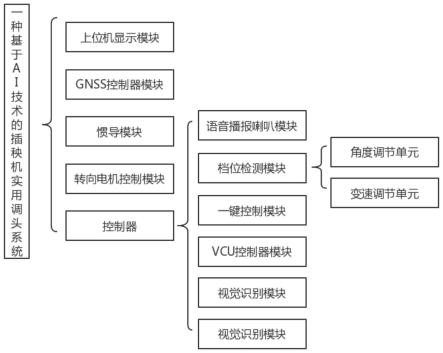
6.一种基于ai技术的插秧机实用调头系统及方法,其特征在于,所述系统包括上位机显示模块、gnss控制器模块、惯导模块、转向电机控制模块以及控制器:
7.所述上位机显示模块用于显示车辆在线状态、在线精度、作业面积以及故障问题;
8.所述转向电机控制模块由扭矩电机、花键套和方向盘组成,卸下原车方向盘安装扭矩电机方向盘,通过花键套齿轮与车辆的转向齿轮轴匹配啮合,线束连接至gnss高精度控制器,在通过rtk技术将车辆车顶卫星控制器接收到的当前定位信息与当前作业设定的ab点连线的直线距离进行比较,通过计算,控制扭矩电机旋转角度,从而实时控制车辆,使车辆保持在线精度,以及实现转弯功能,其中ab点表示插秧机需要完成插秧工作的田地位置,线束表示负载源组提供服务设备的总体,即控制系统;
9.所述惯导模块和gnss控制器模块用于采集插秧机当前的位置信息,并通过计算车身姿态,控制电机转向;
10.所述控制器用于对插秧机实现驱动控制功能。
11.进一步的,所述控制器包括语音播报喇叭模块、档位检测模块、一键控制模块、vcu控制器模块以及视觉识别模块:
12.所述档位检测模块用于实时识别插秧机档位情况;
13.所述vcu控制器模块用于对开关信号进行监测,识别状态码处理,再输出到插秧机控制器中,实现插秧机插植部上升或下降控制;
14.所述一键控制模块与语音播报喇叭模块固定在插秧机后侧扶手位置,与vcu连接,
通过can信号传输信号,其中一键控制模块用于单人作业情况下,在上下苗期间,无需转身向前,按上位机屏幕进行制动操作,拓展功能用于插秧机在行驶时执行半自动模式,语音播报喇叭模块用于通过can信号传输信号,设计该按键模块的一个按钮为开始/停止标称按键,按键默认为自复位类型,id码为0x18a,字节为byte1,当按键按下表示1,按键松开表示0。按键模块的设计既可以避免驾驶员手脏去进行屏幕操作,同时又实现车辆后方可完成所有理想化操作;喇叭模块同理通过can信号线与vcu连接,当车辆识别即将到达田头时候,准备自动转弯,可通过此提醒上苗员注意安全,调整站姿,避免意外事故发生;
15.所述视觉识别模块固定安装于前侧扶手的横置管体上,通过田头围栏,设定标定点与围栏的距离,将标定点的定位坐标发送给北斗gnss控制器,gnss控制器将定位的坐标点作处理连线,连线成为围栏区域,屏幕上位机端设定好固定的转弯识别距离,最后通过比较定位点与围栏点的距离,当车辆行驶至接近距离后,由电机控制调头。
16.进一步的,所述档位检测模块包括角度调节单元和变速调节单元:
17.所述角度调节单元根据电机编码器位置信息,即通过转动角度与方向来判断主变速手柄所处的档位,对插秧机当前行驶速度与行驶方向进行实时监测与反馈,根据监测数据控制扭矩电机转动,控制插秧机hst变速箱,从而实现对插秧机行驶速度和行驶方向的调节;
18.所述变速调节单元用于根据主变速箱的电机位置信息,通过对变速推杆上固定角度传感器进行检测,当主变速推杆手柄推动时,该传感器的转角信号传送到vcu控制模块,控制器对该信号进行处理后转化输出,使插秧机hst变速箱上齿合的齿盘电机旋转到提前标好的对应位置,让插秧机提速或减速、变向。
19.进一步的,所述计算车身姿态,输出控制电机转向的方法包括以下步骤:
20.sa1、根据惯导模块和gnss控制器模块采集的数据,提取插秧机定位信息、速度信息、航向角信息、横滚角和俯仰角信息,其中航向角记为γ,横滚角记为α,俯仰角记为β,速度记为ω;
21.sa2、构建旋转矩阵,表达式为r
ωb
=(r
x
(α)+ry(-β)+rz(γ))
t
其中x、y、z分别表示旋转方向为前、左、上;
22.sa3、根据公式得到横滚角向前旋转矩阵;
23.sa4、根据公式得到俯仰角向左旋转矩阵;
24.sa5、根据公式得到航向角向上旋转矩阵;
25.sa6、通过分析旋转矩阵得到欧拉角为
26.sa7、基于旋转矩阵实时调整插秧机欧拉角度,实现车身姿态实时更新,在插秧机运行时,根据插秧机最佳姿态对应的航向角、横滚角、俯仰角进行实时更新。
27.本发明通过获取插秧机定位信息、速度信息、航向角信息、横滚角和俯仰角信息,根据获取的数据进行构建旋转矩阵,通过对旋转矩阵进行分析得到对应欧拉角计算公式,为后续分析插秧机执行转弯、调头功能提供数据参照。
28.进一步的,所述比较定位点与围栏点的距离,当车辆行驶至接近距离后,由电机控制调头的方法包括以下步骤:
29.sb1、实时获取插秧机前进方向的环境图像,并对获取的环境图像进行预处理;
30.sb2、根据预处理后的环境图像信息进行边界分析;
31.sb3、通过计算拟合直线边界线,并作为转向基准线,发送至gnss高精度控制器作参考计算,实现插秧机调头操作。
32.进一步的,所述对获取的环境图像进行预处理的方法包括以下步骤:
33.sc1、实时获取插秧机前进方向的环境图像;
34.sc2、获取环境图像r,g,b信息,并根据公式将获取的彩色环境图像进行去色,得到环境图像灰度图,其中g
ray
表示灰度图像,r表示环境图像中红色深度值,g表示环境图像中绿色深度值,b表示环境图像中蓝色深度值;
35.sc3、获取灰度图像中每一个像素点值,记为(p1,q1)、(p2,q2)、...、(pn,qn),
36.构建拟合直线函数:p=a1+b1q,其中a1为第一系数,b1为第二系数;
37.sc4、根据公式di=p
i-(a1+b1qi)得到拟合直线函数的误差值;
38.sc5、根据最小二乘法进行求解,得到即其中a表示斜率,b表示截距;
39.sc6、根据拟合直线得到环境图像中田块路道的中线,当中线出现补线情况时,将其作为转向基准线,发送至gnss高精度控制器作参考计算,实现插秧机调头操作,其中gnss高精度控制器是一种基于卫星的无线电导航系统,可以为自动驾驶系统提供时间和地理位置信息。
40.进一步的,所述通过rtk技术将车辆车顶卫星控制器接收到的当前定位信息与当前作业设定的ab点连线的直线距离进行比较,通过计算,控制电机旋转角度,从而实时控制车辆,使车辆保持在线精度,以及实现转弯功能的方法包括以下步骤:
41.sd1、获取车辆当前位置信息;
42.sd2、获取当前作业设定的ab点连线的直线距离s;
43.sd3、根据sa6得到插秧机行驶过程中电机旋转欧拉角;
44.其中l用于根据插秧机位置信息判断转弯条件。
45.本发明通过对插秧机各部分的电气智能化改造,再加上gnss智能农机驾驶系统的配合下,无须再雇佣熟手司机长期驾驶作业,新手轻松上手,在自动模式下,实现插秧机真正自动行走,视觉系统识别地头,电机驱动转弯,电机控变速,无须人工干预识别;按键模式下,人工调头可在后方完成,无须在上苗同的时,再转身控制方向盘实现调头操作,降低工
作强度,提高工作效率,本发明可应用于各种插秧作业。
附图说明
46.图1是本发明一种基于ai技术的插秧机实用调头系统的模块示意图;
47.图2是本发明一种基于ai技术的插秧机实用调头系统及方法的控制关系示意图;
48.图3是本发明一种基于ai技术的插秧机实用调头系统及方法水陆呈现的状态对比度图;
49.图4是本发明一种基于ai技术的插秧机实用调头系统及方法gnss高精度控制器作参考计算流程图;
50.图5是本发明一种基于ai技术的插秧机实用调头系统及方法一键调模式逻辑流程图;
51.图6是本发明一种基于ai技术的插秧机实用调头系统及方法全自动模式逻辑流程图。
具体实施方式
52.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
53.请参阅图1-图6,本发明实施例中:一种基于ai技术的插秧机实用调头系统及方法,所述插秧机实用调头系统及方法包括以下步骤:
54.一种基于ai技术的插秧机实用调头系统及方法,其特征在于,所述系统包括上位机显示模块、gnss控制器模块、惯导模块、转向电机控制模块以及控制器:
55.所述上位机显示模块用于显示车辆在线状态、在线精度、作业面积以及故障问题;
56.所述转向电机控制模块由扭矩电机、花键套和方向盘组成,卸下原车方向盘安装扭矩电机方向盘,通过花键套齿轮与车辆的转向齿轮轴匹配啮合,线束连接至gnss高精度控制器,在通过rtk技术将车辆车顶卫星控制器接收到的当前定位信息与当前作业设定的ab点连线的直线距离进行比较,通过计算,控制扭矩电机旋转角度,从而实时控制车辆,使车辆保持在线精度,以及实现转弯功能,其中ab点表示插秧机需要完成插秧工作的田地位置;
57.所述惯导模块和gnss控制器模块用于采集插秧机当前的位置信息,并通过计算车身姿态,控制电机转向;
58.所述控制器用于对插秧机实现驱动控制功能。
59.所述控制器包括语音播报喇叭模块、档位检测模块、一键控制模块、vcu控制器模块以及视觉识别模块:
60.所述档位检测模块用于实时识别插秧机档位情况;
61.所述vcu控制器模块用于对开关信号进行监测,识别状态码处理,再输出到插秧机控制器中,实现插秧机插植部上升或下降控;
62.所述一键控制模块与语音播报喇叭模块固定在插秧机后侧扶手位置,与vcu连接,
通过can信号传输信号,其中一键控制模块用于单人作业情况下,在上下苗期间,无需转身向前,按上位机屏幕进行制动操作,拓展功能用于插秧机在行驶时执行半自动模式,语音播报喇叭模块用于通过can信号传输信号;
63.本实施例一中,当按下一键控制模块的开始、调头等按钮,对应模块开始运行,将该信号指令的对应识别码和字节位通过canh和canl总线通讯发送给vcu控制器,当vcu控制器接收到对应识别码,立即发送指令停止/开始指令给hst变速箱上方啮合的电机停止,使其工作停止或开始,如执行转弯调头等操作时,vcu控制会继续发送电信号至gnss高精度控制器,最后gnss控制器控制电机方向盘转动,同理可将其它按钮开发为“ab点设定”、“紧急制动”等操作。
64.所述视觉识别模块固定安装于前侧扶手的横置管体上,通过田头围栏,设定标定点与围栏的距离,将标定点的定位坐标发送给北斗gnss控制器,gnss控制器将定位的坐标点作处理连线,连线成为围栏区域,屏幕上位机端设定好固定的转弯识别距离,最后通过比较定位点与围栏点的距离,当车辆行驶至接近距离后,由电机控制调头。
65.所述档位检测模块包括角度调节单元和变速调节单元:
66.所述角度调节单元根据电机编码器位置信息,即通过转动角度与方向来判断主变速手柄所处的档位,对插秧机当前行驶速度与行驶方向进行实时监测与反馈,根据监测数据控制扭矩电机转动,控制插秧机hst变速箱,从而实现对插秧机行驶速度和行驶方向的调节;
67.所述变速调节单元用于根据主变速箱的电机位置信息,通过对变速推杆上固定角度传感器进行检测,当主变速推杆手柄推动时,该传感器的转角信号传送到vcu控制模块,控制器对该信号进行处理后转化输出,使插秧机hst变速箱上齿合的齿盘电机旋转到提前标好的对应位置,让插秧机提速或减速、变向。
68.所述计算车身姿态,输出控制电机转向的方法包括以下步骤:
69.sa1、根据惯导模块和gnss控制器模块采集的数据,提取插秧机定位信息、速度信息、航向角信息、横滚角和俯仰角信息,其中航向角记为γ,横滚角记为α,俯仰角记为β,速度记为ω;
70.sa2、构建旋转矩阵,表达式为r
ωb
=(r
x
(α)+ry(-β)+rz(γ))
t
其中x、y、z分别表示旋转方向为前、左、上;
71.sa3、根据公式得到横滚角向前旋转矩阵;
72.sa4、根据公式得到俯仰角向左旋转矩阵;
73.sa5、根据公式得到航向角向上旋转矩阵;
74.sa6、通过分析旋转矩阵得到欧拉角为
75.sa7、基于旋转矩阵实时调整插秧机欧拉角度,实现车身姿态实时更新。
76.所述比较定位点与围栏点的距离,当车辆行驶至接近距离后,由电机控制调头的方法包括以下步骤:
77.sb1、实时获取插秧机前进方向的环境图像,并对获取的环境图像进行预处理;
78.sb2、根据预处理后的环境图像信息进行边界分析;
79.sb3、通过计算拟合直线边界线,并作为转向基准线,发送至gnss高精度控制器作参考计算,实现插秧机调头操作。
80.所述对获取的环境图像进行预处理的方法包括以下步骤:
81.sc1、实时获取插秧机前进方向的环境图像;
82.sc2、获取环境图像r,g,b信息,并根据公式将获取的彩色环境图像进行去色,得到环境图像灰度图,其中g
ray
表示灰度图像,r表示环境图像中红色深度值,g表示环境图像中绿色深度值,b表示环境图像中蓝色深度值;
83.sc3、获取灰度图像中每一个像素点值,记为(p1,q1)、(p2,q2)、...、(pn,qn),
84.构建拟合直线函数:p=a1+b1q,其中a1为第一系数,b1为第二系数;
85.sc4、根据公式di=p
i-(a1+b1qi)得到拟合直线函数的误差值;
86.sc5、根据最小二乘法进行求解,得到即其中a表示斜率,b表示截距;
87.sc6、根据拟合直线得到环境图像中田块路道的中线,当中线出现补线情况时,将其作为转向基准线,发送至gnss高精度控制器作参考计算,实现插秧机调头操作。
88.所述通过rtk技术将车辆车顶卫星控制器接收到的当前定位信息与当前作业设定的ab点连线的直线距离进行比较,通过计算,控制电机旋转角度,从而实时控制车辆,使车辆保持在线精度,以及实现转弯功能的方法包括以下步骤:
89.sd1、获取车辆当前位置信息;
90.sd2、获取当前作业设定的ab点连线的直线距离s;
91.sd3、根据sa6得到插秧机行驶过程中电机旋转欧拉角;
92.其中l用于根据插秧机位置信息判断转弯条件。
93.本实施例二中,在电气布局选型设计方面,因水田环境较恶劣,插秧机为无顶棚的状态,因此插头和线束选型需针对选用防水及耐uv的材料,且线束方面要防剐蹭,要加增护套管,在此可用德驰品牌和用友系列接头,线束上用波纹管套,并做藏线安排;
94.电源设计方面,供电电源共用12v车载电瓶,在电瓶处需设入总线翘板开关和电压稳压模块,且必须接入可拆卸的30a以上的保险模块,防止短路烧毁设备;另外gnss控制器处需增设开关,如此做法可实现手动驾驶时候,断绝导航的供电,避免多路用电,亦可作导航电源开关制动;
95.零部件系统接入方面,双路h桥接齿盘电机作pwm量标定正反转控制,两路can端口
分开接gnss高精度控制器和按键面板,传感器信号接角度传感器,插植部升降的开关信号接vcu接口,必要时加装继电器,减少对原车控制器影响的可能;
96.上位机控制显示器,在gnss导航控制器的普通功能上,通过can收集vcu传达的信号,增加各个功能模块在当前监测的页面或窗口,实现可视化,如传感器所在的角度值、插植部目前位态、编码器信息;同时在原基础上,增加上更多丰富的作业模式,即手动模式,半自动模式,一键自动模式,全自动模式,以上模式的选择均可通过上位机选择使用,实现高效作业;
97.视觉方面,水田田块一般较为规整,尽管边界呈现非规则曲线,但水陆呈现的状态对比度容易识别(如图2所示),其次选用双目视觉惯性模组摄像头,在惯性模组的支持下,摄像头能得到动态的补偿,可避免因为地形原因识别图像提前或滞后导致的误判信息发送;技术方面,前置摄像头于插秧机横置管杆上,通过图像识别对比地块的成像“灰度”,并获取地头边界处的特征点,求取跳变点的特征,引用算法计算拟合直线边界线,并作为转向基准线,发送至gnss高精度控制器作参考计算(如图3所示);
98.语音模块可选用高低电平信号触发的循环喇叭,按键面板可直接选用成熟产品面板,如工程类目的面板,语音模块必须与按键面板共同固定在一个安装支架上,且必须在插秧机后方,方便操作员听到及操作;
99.结合系统总体设计和各个功能模块,可完成手动化,半自动化,全自动化插秧:
100.启动插秧机之前,把插秧机主变速手柄置于中位,且把各部分功能的电源开关打开,上位机开机后,主屏幕读取各部分功能在线状态,当所有模块系统就位后,方可进行操作,控制主变速杆行驶插秧机至地头开始点的地方,在屏幕上选择想要的作业模式,新建作业打ab点设置航线,设置完成后,点击屏幕进行自动驾驶后,屏幕输入想要的速度,gnss高精度控制器即通过rtk技术计算车身参数、靶线和行距进行直线插秧作业(如图5、图6所示),作业的轨迹和亩数每次都会上传至上位机系统,用户可随时观察播种的线路。
101.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明,因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
102.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序,而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
103.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1