一种芦苇切割机的制作方法
1.本发明涉及芦苇切割机技术领域,具体为一种芦苇切割机。
背景技术:
2.芦苇,多年水生或湿生得高大禾草,根状茎十分发达。秆直立,高1-3米,具20多节,叶鞘下部者短于其上部者,长于其节间;叶舌边缘密生一圈长约1毫米的短纤毛,易脱落;叶片披针状线形,无毛,顶端长渐尖呈丝形,圆锥花序大型,分枝多数;小穗无毛;内稃两脊粗糙;花药黄色;颖果长约1.5毫米,芦苇为全球广泛分布的多型种,生于江河湖泽、池塘沟渠沿岸和低湿地,芦苇多种在水边,在开花季节特别漂亮,可供观赏。由于芦苇的叶、叶鞘、茎、根状茎和不定根都具有通气组织,所以它在净化污水中起到重要的作用,芦苇茎秆坚韧,纤维含量高,是造纸工业中不可多得的原材料,芦苇多种在水边,在开花季节特别漂亮。但是到了秋冬季节,景区的芦苇得不到及时的清理,会影响景区景观。也有火灾风险。
3.根据专利申请号“cn202022516191.0一种水陆两栖芦苇收割船”中记载的“包括船体、固定在船体上的操作室和动力柜,所述动力柜内设置有驱动机构;其特征在于:所述船体的两侧分别安装有行走履带,所述船体的尾部安装有升降式螺旋桨推进器;所述船体的前部安装有能够水平转动和竖直升降的收集臂,所述收集臂的前端装配有收割机构,所述收割机构包括固定在收集臂前端上的底座和装配在底座上的叉子或者剪刀”。
4.根据上述专利可得知由于芦苇生长的习性,其多生长于浅滩及沼泽地带,一般设备很难进入进行收割,所以该装置船具有体积小、重量轻、行走灵活等特点,可在水和滩涂上交替工作,同时,收割机构的叉子和剪刀方便拆装更换,工作时,先用剪刀将滩涂地或水里的杂草或芦苇割倒,然后更换叉子,将杂草或芦苇收集上岸,解决了沼泽及浅滩芦苇的收割、清理问题,但是在对岸边的芦苇进行处理时,不能够很好地进行处理,而且在处理位于河中间的芦苇时也较为不便,影响收割的作业效率。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种芦苇切割机,具备便于收割河中芦苇的优点,解决了现有的水陆两栖收割装置,在处理河中的芦苇时,影响作业效率的问题。
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:一种芦苇切割机,包括收割组件,所述收割组件包括
9.车体,所述车体的顶部设置有雷达;
10.放置盒,设置于所述车体的尾端;
11.连接杆,对称设置于所述车体的前端;
12.收割盘,设置于所述连接杆的一端;
13.前轮,对称设置于所述车体的前端;
14.桨叶轮,对称设置于所述车体的后端;
15.所述车体的一侧设置有安装组件,所述安装组件包括
16.电动推杆一,对称设置于所述车体的两侧;
17.连接板,对称设置于所述车体的两侧;
18.浮力壳体,设置于所述车体的底部;
19.安装座,对称设置于所述浮力壳体的内侧相对面一侧,并与所述电动推杆一铰接;
20.铰接座,对称设置于所述浮力壳体的内侧相对面另一侧,并与所述连接板铰接;
21.限位槽,对称设置于所述铰接座的两侧;
22.固定板,对称设置于所述浮力壳体的内侧相对面;
23.电机,设置于一侧所述固定板的一侧;
24.螺杆,对称设置于两个对称所述固定板的相对面,一侧所述螺杆与所述电机的输出轴相连接;
25.联动杆,设置于一侧两个对称所述螺杆的一端;
26.活动板,设置于所述螺杆的外侧壁;
27.框体,设置于所述浮力壳体的内侧相对面;
28.限位板,设置于所述活动板的一侧,一端穿过所述框体的一侧并插入所述限位槽的内侧。
29.优选的,所述车体的顶部设置有辅助组件,所述辅助组件包括
30.led灯,设置于所述车体的顶部前端。
31.优选的,所述车体的前端设置有电动推杆二,所述电动推杆二的另一端与所述收割盘铰接。
32.优选的,所述车体的顶部对称设置有摄像头。
33.优选的,所述车体的尾端顶部设置有把手,所述车体的尾端底部设置有站台。
34.优选的,两个对称所述固定板的相对面设置有防护框,所述活动板的顶部穿过所述防护框的顶部。
35.优选的,所述螺杆的一端均设置有限位环,所述联动杆的两端分别与两个对称所述限位环螺栓连接。
36.优选的,所述浮力壳体的内侧底部设置有多个配重块。
37.优选的,所述车体的底部尾端对称设置有轮胎。
38.(三)有益效果
39.与现有技术相比,本发明提供了一种芦苇切割机,具备以下有益效果:
40.该芦苇切割机,通过在使用时,通过使得电动推杆一底部设置的锁链与安装座进行铰接,然后将两个连接板底部的两个铰接座分别放置到两个框体内侧,然后启动电机带动螺杆进行转动,然后通过联动杆带动另一个螺杆进行转动,由于螺杆的外侧壁设置活动板,活动板的一侧设置限位板,限位板的一端穿过框体的一侧,这样当启动电机时可以带动活动板左右移动,并插入限位槽内侧,这样启动电动推杆一将浮力壳体的尾部抬起来,这样就安装完成了,这样方便车体下水对芦苇进行收割,避免出现不方便收割河中芦苇的状况,增加了作业效率,该芦苇收割机器人主体具有遥控和无人驾驶功能。
附图说明
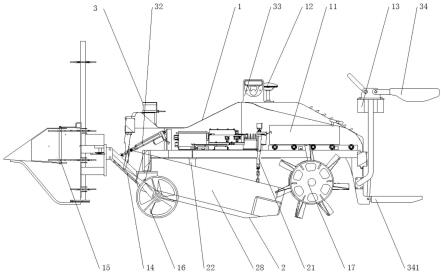
41.图1为本发明结构示意图;
42.图2为本发明安装完成后浮力壳体内部的结构示意图;
43.图3为本发明车体的结构示意图;
44.图4为本发明中a处放大的结构示意图;
45.图5为本发明中铰接座侧面的结构示意图;
46.图6为本发明中限位环侧面的结构示意图。
47.图中:
48.1、收割组件;11、车体;12、雷达;13、放置盒;14、连接杆;15、收割盘;16、前轮;17、浆叶轮;171、轮胎;
49.2、安装组件;21、电动推杆一;211、安装座;22、连接板;221、铰接座;222、限位槽;23、固定板;24、电机;25、螺杆;251、联动杆;26、活动板;261、限位板;27、框体;28、浮力壳体;
50.3、辅助组件;31、led灯;32、电动推杆二;33、摄像头;34、把手;341、站台;35、配重块;36、防护框;37、限位环。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.实施例一
53.一种芦苇切割机,包括收割组件1,所述收割组件1包括
54.车体11,所述车体11的顶部设置有雷达12;
55.放置盒13,设置于所述车体11的尾端;
56.连接杆14,对称设置于所述车体11的前端;
57.收割盘15,设置于所述连接杆14的一端;
58.前轮16,对称设置于所述车体11的前端;
59.浆叶轮17,对称设置于所述车体11的后端;
60.所述车体11的一侧设置有安装组件2,所述安装组件2包括
61.电动推杆一21,对称设置于所述车体11的两侧;
62.连接板22,对称设置于所述车体11的两侧;
63.浮力壳体28,设置于所述车体11的底部;
64.安装座211,对称设置于所述浮力壳体28的内侧相对面一侧,并与所述电动推杆一21铰接;
65.铰接座221,对称设置于所述浮力壳体28的内侧相对面另一侧,并与所述连接板22铰接;
66.限位槽222,对称设置于所述铰接座221的两侧;
67.固定板23,对称设置于所述浮力壳体28的内侧相对面;
68.电机24,设置于一侧所述固定板23的一侧;
69.螺杆25,对称设置于两个对称所述固定板23的相对面,一侧所述螺杆25与所述电机24的输出轴相连接;
70.联动杆251,设置于一侧两个对称所述螺杆25的一端;
71.活动板26,设置于所述螺杆25的外侧壁;
72.框体27,设置于所述浮力壳体28的内侧相对面;
73.限位板261,设置于所述活动板26的一侧,一端穿过所述框体27的一侧并插入所述限位槽222的内侧。
74.参阅图1-6,在使用时,通过使得电动推杆一21底部设置的锁链与安装座进行铰接,然后将两个连接板22底部的两个铰接座221分别放置到两个框体27内侧,然后启动电机24带动螺杆25进行转动,然后通过联动杆251带动另一个螺杆25进行转动,由于螺杆25的外侧壁设置活动板26,活动板26的一侧设置限位板261,限位板261的一端穿过框体27的一侧,这样当启动电机24时可以带动活动板26左右移动,并插入限位槽222内侧,这样启动电动推杆一21将浮力壳体28的尾部抬起来,这样就安装完成了,这样方便车体11下水对芦苇进行收割,避免出现不方便收割河中芦苇的状况,增加了作业效率,该芦苇收割机器人主体具有遥控和无人驾驶功能。
75.实施例二
76.在实施例一的基础上增加了辅助组件3。
77.所述车体11的顶部设置有辅助组件3,所述辅助组件3包括led灯31,设置于所述车体11的顶部前端,所述车体11的前端设置有电动推杆二32,所述电动推杆二32的另一端与所述收割盘15铰接,所述车体11的顶部对称设置有摄像头33,所述车体11的尾端顶部设置有把手34,所述车体11的尾端底部设置有站台341,两个对称所述固定板23的相对面设置有防护框36,所述活动板26的顶部穿过所述防护框36的顶部,所述螺杆25的一端均设置有限位环37,所述联动杆251的两端分别与两个对称所述限位环37螺栓连接,所述浮力壳体28的内侧底部设置有多个配重块35,所述车体11的底部尾端对称设置有轮胎171。
78.参阅图1-6,通过在车体11的前端设置led灯31,这样可以方便在作业时进行照明,通过在车体11的前端设置电动推杆二32,另一端并与收割盘15铰接,这样方便后续调节收割盘15的高度,以便适应不同的状况,通过在车体11的顶部对称设置摄像头33,这样可以通过摄像头33,实时观察车体11的作业状况,通过在车体11的尾部顶部设置把手34,在底部设置站台341,这样可以在供转移场地时或其他需要时人员站于该平台上操作,通过在两个固定板23的相对面设置防护框36,这样可以避免螺杆25大面积裸露在外面,对螺杆25起到一个防护效果,通过在螺杆25的一端均设置限位环37,使得限位环37与联动杆251螺栓连接,这样方便后续将联动杆251拆卸下来进行更换或是维护,通过在浮力壳体28的内侧底部设置多个配重块35,以防止机器本体侧翻,通过在车体11的底部尾端对称设置轮胎171,这样方便后续将车体11切换成陆地形态。
79.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1