一种基于机器视觉的自动施肥设备的制作方法
本发明涉及农业施肥设备,尤其涉及一种基于机器视觉的自动施肥设备。
背景技术:
1、当土壤里不能提供作物生长发育所需的营养时,对作物进行人为的营养元素的补充的行为称为施肥,通过向作物周围的土壤中施放有机肥料或无机肥料以增加土壤养分。
2、目前,我国已经成为世界上最大的化肥生产国和消费国,高效施肥有利于降低肥料使用、节约生产成本、减少环境污染,过度使用肥料会造成土壤污染、地力下降、农作物减产。施肥过程中,肥料堆积容易造成烧损作物根部,且造成土壤板结,而肥料过少将达不到预期施肥效果。
3、现有的施肥方法大多采用人工施肥,但人工施肥大多是采用集中施肥的方式进行施肥,采用集中式的喷洒方式的进行施肥,这样不仅会造成肥料浪费,而且多余的肥料会造成土壤性状恶化和环境污染,且人工施肥会导致施肥效率低以及施肥不均匀的问题出现。
技术实现思路
1、本发明的目的在于提供一种基于机器视觉的自动施肥设备,已解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的自动施肥设备,包括有设备主体,所述设备主体底部设置有驱动机构,所述设备主体的顶部一侧设置有控制机构,所述控制机构顶部分别设置有图像识别装置与定位传感器,所述设备主体的顶部另一侧分别设置有送料机构与机械臂,所述机械臂顶部一侧滑动设置有施肥机构,所述施肥机构分别通过第一气缸与下料管相互连接构成,所述机械臂固定设置于设备主体的顶部并向上延伸设置,所述送料机构连接下料管,所述控制机构内部设置有信息处理器与控制开关,所述图像识别装置与定位传感器均连接信息处理器,所述控制开关分别连接驱动机构、送料机构、施肥机构与机械臂。
3、优选地,所述驱动机构包括有驱动轮与驱动电机,所述驱动电机的动力输出端连接有传动轴,所述传动轴外部套设有驱动轮,且所述驱动机构顶部设置有减震弹性件。
4、优选地,所述送料机构包括有料仓与固定架,所述固定架通过若干挡条相互拼接构成,且所述料仓卡设于固定架内部,所述料仓的底部向下延伸设置有落料口,所述落料口通过管道连接下料管。
5、优选地,所述机械臂分别通过纵向移动装置、横向移动装置与竖直移动装置相互连接构成,所述纵向移动装置顶部滑动设置有横向移动装置,所述横向移动装置的顶部滑动设置有竖直移动装置。
6、优选地,所述纵向移动装置、横向移动装置与竖直移动装置均设置有气缸,所述控制开关通过先关连接气缸。
7、优选地,所述落料口内部设置有单向阀,所述控制开关通过线管连接单向阀。
8、优选地,所述图像识别装置包括有摄像头与图像传感器,所述摄像头连接图像传感器,所述图像传感器通过线管连接信息处理器。
9、优选地,所述下料管外部开设有开口,所述下料管内部穿设有钻杆,所述第一气缸的动力输出端连接钻杆,所述钻杆外部套设有分料片,所述分料片整体呈圆弧状结构,且所述分料片与所述下料管内壁相贴合。
10、优选地,所述控制机构与送料机构外部均套设有保护罩。
11、本发明提供一种基于机器视觉的自动施肥设备,具有以下有益效果:
12、一、通过图像识别装置对植物根部的ai生长分析,枝干估价分析反馈至信息处理器,且通过信心处理器深度学习基于ncc神经网络提取植物骨架,确认植物根部位置后启动控制开关,通过控制开关启动机械臂,通过机械臂带动施肥机构达到精确定位施肥,有效的通过精准施肥不会造成浪费和不会对庄稼地造成土壤污染;
13、二、定位传感器可采用激光雷达或超声波雷达进行感知定位,从而传输定位信息至信息处理器,通过信息处理器启动控制开关,通过控制开关启动驱动机构,从而达到自动驾驶的作用,并有一定的越障能力;
14、三、施肥过程中,通过图像识别装置针对不同状态的植被进行图像识别后传输数据至信息处理器中,通过信息处理器计算出施肥用量后启动控制开关,通过控制开关控制单向阀从而达到肥料量送料的控制;
15、结合以上所述,可达到减少人工劳动强度,提高施肥效率,实现设备自动施肥的作用。
技术特征:
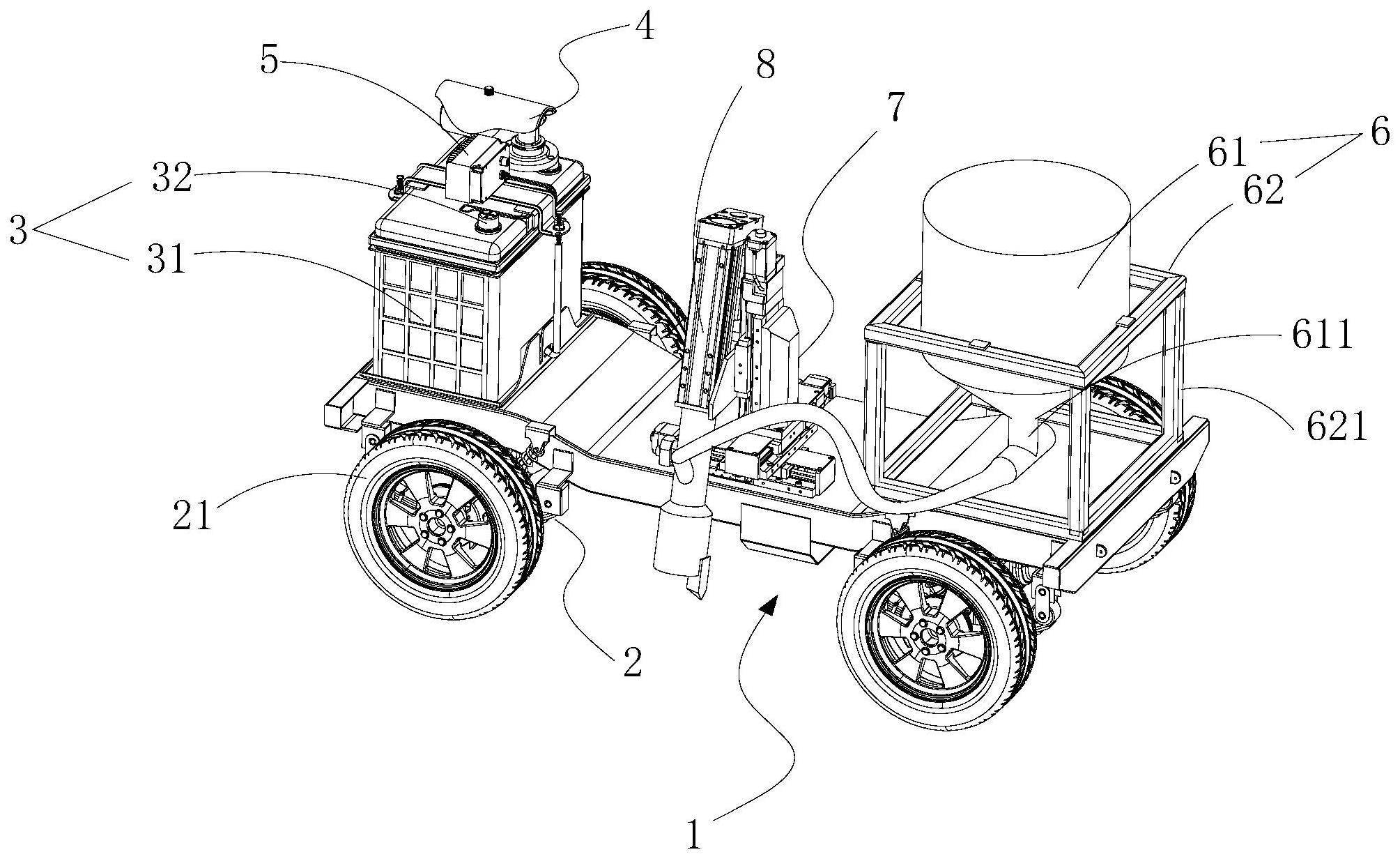
1.一种基于机器视觉的自动施肥设备,其特征在于,包括有设备主体(1),所述设备主体(1)底部设置有驱动机构(2),所述设备主体(1)的顶部一侧设置有控制机构(3),所述控制机构(3)顶部分别设置有图像识别装置(4)与定位传感器(5),所述设备主体(1)的顶部另一侧分别设置有送料机构(6)与机械臂(7),所述机械臂(7)顶部一侧滑动设置有施肥机构(8),所述施肥机构(8)分别通过第一气缸(81)与下料管(82)相互连接构成,所述机械臂(7)固定设置于设备主体(1)的顶部并向上延伸设置,所述送料机构(6)连接下料管(82),所述控制机构(3)内部设置有信息处理器(31)与控制开关(32),所述图像识别装置(4)与定位传感器(5)均连接信息处理器(31),所述控制开关(32)分别连接驱动机构(2)、送料机构(6)、施肥机构(8)与机械臂(7)。
2.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述驱动机构(2)包括有驱动轮(21)与驱动电机(22),所述驱动电机(22)的动力输出端连接有传动轴(23),所述传动轴(23)外部套设有驱动轮(21),且所述驱动机构(2)顶部设置有减震弹性件。
3.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述送料机构(6)包括有料仓(61)与固定架(62),所述固定架(62)通过若干挡条(621)相互拼接构成,且所述料仓(61)卡设于固定架(62)内部,所述料仓(61)的底部向下延伸设置有落料口(611),所述落料口(611)通过管道连接下料管(82)。
4.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述机械臂(7)分别通过纵向移动装置(71)、横向移动装置(72)与竖直移动装置(73)相互连接构成,所述纵向移动装置(71)顶部滑动设置有横向移动装置(72),所述横向移动装置(72)的顶部滑动设置有竖直移动装置(73)。
5.根据权利要求4所述一种基于机器视觉的自动施肥设备,其特征在于,所述纵向移动装置(71)、横向移动装置(72)与竖直移动装置(73)均设置有第二气缸(74),所述控制开关(32)通过先关连接第二气缸(74)。
6.根据权利要求3所述一种基于机器视觉的自动施肥设备,其特征在于,所述落料口(611)内部设置有单向阀,所述控制开关(32)通过线管连接单向阀。
7.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述图像识别装置(4)包括有摄像头(41)与图像传感器(42),所述摄像头(41)连接图像传感器(42),所述图像传感器(42)通过线管连接信息处理器(31)。
8.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述下料管(82)外部开设有开口(821),所述下料管(82)内部穿设有钻杆(822),所述第一气缸(81)的动力输出端连接钻杆(822),所述钻杆(822)外部套设有分料片(823),所述分料片(823)整体呈圆弧状结构,且所述分料片(823)与所述下料管(82)内壁相贴合。
9.根据权利要求1所述一种基于机器视觉的自动施肥设备,其特征在于,所述控制机构(3)与送料机构(6)外部均套设有保护罩(10)。
技术总结
本发明公开了一种基于机器视觉的自动施肥设备,包括有设备主体,所述设备主体底部设置有驱动机构,所述设备主体的顶部一侧设置有控制机构,所述控制机构顶部分别设置有图像识别装置与定位传感器,所述设备主体的顶部另一侧分别设置有送料机构与机械臂,所述机械臂顶部一侧滑动设置有施肥机构,所述机械臂固定设置于设备主体的顶部并向上延伸设置,所述控制机构内部设置有信息处理器与控制开关,所述图像识别装置与定位传感器均连接信息处理器,控制开关分别连接驱动机构、送料机构、施肥机构与机械臂,有效的通过精准施肥不会造成浪费和不会对庄稼地造成土壤污染,可达到减少人工劳动强度,提高施肥效率,实现设备自动施肥的作用。
技术研发人员:李良勇,承高印,黄华东,李兰云,邹光富,罗东玮
受保护的技术使用者:广东若铂智能机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!