一种应用于剑麻的机械化收割车的制作方法
1.本实用新型涉及剑麻收割设备技术领域,尤其涉及一种应用于剑麻的机械化收割车。
背景技术:
2.剑麻(agave sisalana)又名菠萝麻,龙舌兰科龙舌兰属,是一种多年生热带硬质叶纤维作物,其原产墨西哥,现主要在非洲、拉丁美洲、亚洲等地种植,是当今世界用量最大,范围最广的一种硬质纤维。剑麻纤维具有刚硬粗糙、洁白坚韧、强力高、吸放湿度快,耐磨、耐海水浸泡、耐腐蚀、无静电等的特点.主要应用于纺织、航运、电梯、工矿、物流运输、汽车制造和造纸等领域。另外,剑麻麻渣可用于制造生物有机肥,麻渣水提取的皂素可用于制药,应用前景广阔。然而,我国剑麻种植技术虽然已经趋向于成熟,平均单位面积产量居世界第一,但剑麻紫色卷叶病等新问题已成为制约剑麻产业健康发展的瓶颈,有待加大科研投入;现阶段中,剑麻叶片收获机械化程度低。剑麻生产整个环节除叶片收割仍基本由人工收割外,其他生产环节己实现机械化。国内研究热带作物机械的科研机构及剑麻主产区企业达成一致认识,必须加快剑麻叶片收割机械研制,尽快实现样机生产和大田应用试验,解决割麻工短缺和生产成本高的问题。
技术实现要素:
3.本实用新型克服了现有技术的不足,提供了一种应用于剑麻的机械化收割车。
4.为达上述目的,本实用新型采用的技术方案为:
5.本实用新型提供了一种应用于剑麻的机械化收割车,包括运动系统以及设置在运动系统上的收割系统,
6.所述运动系统包括运动车,所述运动车包括驾驶室,所述驾驶室的侧部设置有固定架,所述固定架上设置有若干伸缩杆,所述伸缩杆的另一端设置有纵向移动架,所述纵向移动架上设置有移动气缸,所述移动气缸上设置有若干导向杆;
7.所述收割系统包括驱动电机固定支架,所述驱动电机固定支架上设置有驱动电机,所述驱动电机的输出端连接圆形活动块,所述圆形活动块连接第一连杆,所述第一连杆的另一端连接两第二连杆,所述第二连杆均连接第三连杆,以通过启动所述驱动电机调节所述第三连杆的位置。
8.进一步地,本实用新型的一个较佳实施例中,所述圆形活动块上设置有若干圆孔,以通过所述圆孔连接所述第一连杆。
9.进一步地,本实用新型的一个较佳实施例中,所述第三连杆之间设置有弹簧。
10.进一步地,本实用新型的一个较佳实施例中,所述第三连杆内设置有凹槽,所述凹槽内设置收割片。
11.进一步地,本实用新型的一个较佳实施例中,所述收割片连接旋转电机,所述旋转电机固定于所述第三连杆上。
12.进一步地,本实用新型的一个较佳实施例中,所述驱动电机固定支架连接所述移动气缸。
13.进一步地,本实用新型的一个较佳实施例中,所述导向杆的两端固定于方形固定块上,所述方形固定块设置于所述纵向移动架上。
14.进一步地,本实用新型的一个较佳实施例中,所述第一连杆与第二连杆的连接为活动连接。
15.进一步地,本实用新型的一个较佳实施例中,所述第二连杆与第三连杆的连接为活动连接。
16.进一步地,本实用新型的一个较佳实施例中,所述纵向移动架上设置有对位传感器。
17.本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
18.本实用新型设置的收割系统,实现自动化收割的同时,还能够根据剑麻植株的大小进行自由调节收割的宽度,提高收割的效率,自动化程度高。另一方面,本实用新型设置有对位传感器,能够自动对位剑麻植株所在的位置,以调节宽度对剑麻植株的叶片进行收割,能够提高收割的效率。而且收割员可以进入到驾驶室中,这时就可以避免在进行收割剑麻叶片时被剑麻叶片割伤的情况出现,利用机械代替人工,实现自动化收割。
附图说明
19.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
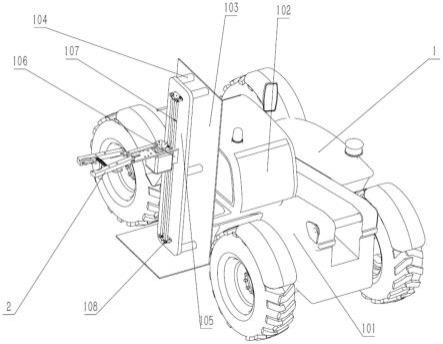
20.图1为一种应用于剑麻的机械化收割车的立体结构示意图;
21.图2为收割系统的正面结构示意图;
22.图中:
23.1.运动系统,2.收割系统,101.运动车,102.驾驶室,103.固定架,104.伸缩杆,105.纵向移动架,106.移动气缸,107.导向杆,108.方形固定块,201.驱动电机固定支架,202.驱动电机,203.圆形活动块,204.第一连杆,205.第二连杆,206.第三连杆,207.弹簧,208.收割片,209.旋转电机。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.本实用新型的描述中,“实施例”、“一个实施例”、“一些实施例”、或“其他实施例”的提及表示结合实施例说明的特定特征、结构或特性包括在至少一些实施例中,但不必是全部实施例。“实施例”、“一个实施例”、或“一些实施例”的多次出现不一定全都指代相同的实施例。如果说明书描述了部件、特征、结构或特性“可以”、“或许”或“能够”被包括,则该特定部件、特征、结构或特性不是必需被包括的。如果说明书或权利要求提及“一”元件,并非
表示仅有一个元件。如果说明书或权利要求提及“一另外的”元件,并不排除存在多于一个的另外的元件。此外,特定特征、结构、功能或特性可以以任何适合的方式组合到一个或多个实施例中。例如,第一实施例可以结合第二实施例,只要与这两个实施例相关联的特定特征、结构、功能或特性不互相排斥。
26.在本实用新型的描述中,除非另外规定,否则使用序数形容词“第一”、“第二”及“第三”等来描述共同的对象,仅表示指代相同对象的不同实例,而并不是要暗示这样描述的对象必须采用给定的顺序,无论是时间地、空间地、排序地或任何其它方式。在本实用新型创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
27.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
28.本实用新型提供了一种应用于剑麻的机械化收割车,包括运动系统1以及设置在运动系统1上的收割系统2,
29.所述运动系统1包括运动车101,所述运动车101包括驾驶室102,所述驾驶室102的侧部设置有固定架103,所述固定架103上设置有若干伸缩杆104,所述伸缩杆104的另一端设置有纵向移动架105,所述纵向移动架105上设置有移动气缸106,所述移动气缸106上设置有若干导向杆107;
30.需要说明的是,收割员可以进入到驾驶室中,这时就可以避免在进行收割剑麻叶片时被剑麻叶片割伤的情况出现,利用机械代替人工,实现自动化收割;而且在进行切割作业时,所述伸缩杆104能够带动所述纵向移动架105从而带动收割系统2,能够自由调节切割的距离,能深入到更深的地方对剑麻的叶片进行切割。而且所述移动气缸106能够带动收割系统2,从而使得在收割剑麻叶片时,能够自下而上地收割,自动化程度高的同时,而且能够有效地提高收割效率,有效地避免工作人员人员被割伤。
31.所述收割系统2包括驱动电机固定支架201,所述驱动电机固定支架201上设置有驱动电机202,所述驱动电机202的输出端连接圆形活动块203,所述圆形活动块203连接第一连杆204,所述第一连杆204的另一端连接两第二连杆205,所述第二连杆205均连接第三连杆206,以通过启动所述驱动电机202调节所述第三连杆206的位置。
32.需要说明的是,利用驱动电机202带动所述圆形活动块203,从而带动所述第一连杆204的转动,第一连杆204又带动第二连杆205,使得第三连杆206调节夹取的宽度,以适应不同剑麻植株的宽度。
33.进一步地,本实用新型的一个较佳实施例中,所述圆形活动块203上设置有若干圆孔,以通过所述圆孔连接所述第一连杆204。
34.需要说明的是,用户可以随意调节第一连杆204连接在所述圆形活动块203上的位置,用户有更多的选择。
35.进一步地,本实用新型的一个较佳实施例中,所述第三连杆206之间设置有弹簧207。
36.进一步地,本实用新型的一个较佳实施例中,所述第三连杆206内设置有凹槽,所
述凹槽内设置收割片208。
37.进一步地,本实用新型的一个较佳实施例中,所述收割片208连接旋转电机209,所述旋转电机209固定于所述第三连杆206上。
38.需要说明的是,在收割时,利用旋转电机209带动收割片208旋转,从而该收割片208能够作用于剑麻叶片,完成收割。
39.进一步地,本实用新型的一个较佳实施例中,所述驱动电机固定支架201连接所述移动气缸106。
40.进一步地,本实用新型的一个较佳实施例中,所述导向杆107的两端固定于方形固定块108上,所述方形固定块108设置于所述纵向移动架106上。
41.需要说明的是,在收割系统2在移动气缸的作用之下,收割系统2在导向杆107的作用之下,能够自下而上进行移动,使得在收割剑麻叶片时能够从底部往顶部移动,收割效率更高。
42.进一步地,本实用新型的一个较佳实施例中,所述第一连杆204与第二连杆205的连接为活动连接。
43.进一步地,本实用新型的一个较佳实施例中,所述第二连杆205与第三连杆206的连接为活动连接。
44.进一步地,本实用新型的一个较佳实施例中,所述纵向移动架106上设置有对位传感器。
45.需要说明的是,本实用新型设置的收割系统,实现自动化收割的同时,还能够根据剑麻植株的大小进行自由调节收割的宽度,而且能够在垂直方向上自下而上对剑麻植株的叶片进行收割,提高收割的效率,自动化程度高。另一方面,本实用新型设置有对位传感器,能够自动对位剑麻植株所在的位置,以调节宽度对剑麻植株的叶片进行收割,能够提高收割的效率。而且收割员可以进入到驾驶室中,这时就可以避免在进行收割剑麻叶片时被剑麻叶片割伤的情况出现,利用机械代替人工,实现自动化收割。
46.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
47.上述虽然结合附图对本实用新型的具体实施方式进行了描述,但并非对本实用新型保护范围的限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1