自动清理猫便装置的制作方法
1.本实用新型涉及宠物用具技术领域,特别是涉及一种自动清理猫便装置。
背景技术:
2.随着生活水平提高,越来越多人养宠物,对宠物用品的需求增长大,猫砂具有吸水的特性,是用来掩埋猫的粪便和尿液的产品,猫砂盆则是用来盛装猫砂的盆子,猫砂盆又称为猫厕所,现有的猫砂盒都是一层或者两层手动封闭式结构,需要猫主人手动清理猫砂盆中的结块排泄物,而排泄物往往带有刺激性味道,且清洁过程相当繁琐和耗费时间,还容易导致卫生问题。
技术实现要素:
3.基于此,有必要针对手动清理猫便过程中繁琐且耗时长、不卫生的问题,提供一种猫便清理装置,可以实现机械清理猫便。
4.一种自动清理猫便装置,包括:壳体组件,所述壳体组件内设有安装腔;驱动装置,所述驱动装置设置在所述壳体组件上,所述驱动装置至少部分位于所述安装腔内,所述驱动装置能在安装腔内运动;清洁装置,所述清洁装置设置在所述驱动装置上,所述清洁装置位于所述安装腔内,所述驱动装置用于驱使所述清洁装置在壳体组件上运动;盆体组件,所述盆体组件设置在所述壳体组件上,所述盆体组件至少部分位于所述安装腔内,所述清洁装置的部分延伸到所述盆体组件内。
5.本技术公开了一种自动清理猫便装置,通过在壳体组件上内设有盆体组件,将猫砂放置于盆体组件内。通过在壳体组件上设置驱动装置,驱动装置用于驱动清洁装置在壳体组件上运动,由于猫砂在掩埋猫排泄物后会成团结块,当驱动装置启动时,能使清洁装置自动在安装腔内运动,在此过程中,清洁装置延伸到盆体组件的部分会对结团的猫砂进行筛选清理,实现自动清洁猫便的工作过程,避免人们手动清理猫便的繁琐以及可能存在的卫生问题。
6.在其中一个实施例中,还包括打包装置,所述打包装置与所述盆体组件相邻设置,所述打包装置用于收纳所需清理的猫便。通过设置打包装置,当清洁装置工作完成后,驱动装置将清洁装置收集到的结团猫砂送到打包装置内进行打包收纳,便能完成整个自动清洁猫便的工作过程。该装置结构简单,能实现自动清洁猫便和自动打包的工作过程,人们只需要定时倒掉打包装置内的猫便就能完成清理过程,避免人工清理猫便的不便。
7.在其中一个实施例中,所述打包装置包括盒体本体、盖体组件和开盖组件,所述盒体本体与所述盆体组件相邻设置,所述盒体本体设有开口,所述盖体组件设置在所述盒体本体上,所述盖体组件位于所述盒体本体的所述开口处,所述开盖组件设置在所述盒体本体上,所述驱动装置能驱动所述开盖组件运动,所述开盖组件相对于所述盒体本体运动时至少具有第一位置,所述开盖组件位于所述第一位置时能打开所述盖体组件。通过在打包装置上设有开盖组件,开盖组件设置在盒体本体上,用于打开处于盒体本体开口处的盖体
组件,当驱动装置在安装腔内运动时驱动清洁装置运动,清洁装置在运动过程中对结团猫砂进行铲除,当驱动装置运动到打包装置一端,驱动开盖组件的转动从而打开盖体组件,结团猫砂随着清洁装置的运动被送到打包装置内。
8.在其中一个实施例中,所述盖体组件包括盒盖和连接杆,所述连接杆设置在所述盒体本体上,所述连接杆能相对所述盒体本体转动,所述盒盖设置在所述连接杆上,所述盒盖位于所述盒体本体的所述开口处,所述开盖组件位于所述第一位置时,所述盒盖打开所述盒体本体的所述开口。通过在盒体本体上设有连接杆,连接杆能相对盒体本体转动,盒盖的一端通过连接杆连接在盒体本体上,当盒盖翻转时能使连接杆相对于盒体本体转动,从而达到打开或关闭盒体本体上开口的工作状态,当驱动装置运动到打包装置一端时能驱动开盖组件的转动从而驱使盒盖的翻转,此时,清洁装置上的结团猫砂被放入打包装置内收纳。
9.在其中一个实施例中,所述开盖组件包括第一推动件和驱动杆,所述第一推动件设置在所述盒体本体上,所述第一推动件能相对所述盒体本体转动,所述盒体本体上设有第一限位孔,所述驱动杆与所述盖体组件相邻设置,所述驱动杆一端设置在所述第一推动件上,所述驱动杆另一端穿过所述第一限位孔,所述驱动杆能沿所述限位孔运动,所述驱动杆至少部分位于所述盒体本体的空腔内,所述开盖组件位于所述第一位置时,所述驱动杆驱动所述盖体组件打开所述盒体本体的所述开口。通过在开盖组件上设置第一推动件,第一推动件能相对于盒体本体进行转动,在第一推动件的另一端设有驱动杆,驱动杆的另一端穿设在盒体本体的第一限位孔上,驱动杆的另一端与盖体组件相邻设置,当驱动装置运动到打包装置的一端,同时推动第一推动件的转动,设置在第一推动件上的驱动杆随之沿第一限位孔往上运动,从而实现打开盖体组件的工作过程。
10.在其中一个实施例中,所述驱动装置包括第一轨道组件,驱动组件和第二推动组件,所述第一轨道组件设置在所述壳体组件上,所述驱动组件设置在所述第一轨道组件上,所述驱动组件能相对于所述第一轨道组件运动,所述第二推动件设置在所述驱动组件上,所述驱动组件用于驱动所述第二推动件的运动,所述清洁装置设置在所述第二推动件上。通过设置驱动组件作为本装置的动力源,驱动组件能自动沿第一轨道组件进行运动,通过将第二推动件设置在驱动组件上,驱动装置在第一轨道组件上的运动从而带动第二推动件沿第一轨道组件的方向同步运动,达到驱动第二推动件运动的效果,而推动件的运动会驱动连接在驱动装置上的清洁装置在安装腔内运动,从而有效可靠地实现自动清理结团猫砂的工作过程,避免人工清理的繁琐以及可能因此造成的卫生健康问题。
11.在其中一个实施例中,所述驱动装置还包括传感器,所述传感器设置在所述驱动组件上,所述传感器用于感应和测量所述驱动装置的位移情况。通过在驱动装置上设置传感器,该传感器为位移传感器,通过位移传感器感应驱动装置的运动情况,从而实现更智能的自动清理运动,使清理猫便驱动装置实现智能化和自动化。
12.在其中一个实施例中,所述第二推动件有两个,两个所述第二推动件分别设置在所述驱动组件的两端,所述第二推动件包括第二推动件本体和限位组件,所述限位组件与所述驱动组件相适配,所述限位组件设置在第二推动件本体上,所述驱动组件驱动所述第二推动件本体运动。通过在驱动组件两端分别设置第二推动件,能使驱动装置的运动过程更加可靠和高效,第二推动件上设有与驱动组件相适配安装的限位组件,使得第二推动件
固定在驱动组件上,在驱动组件运动的情况下,第二推动件能随着驱动组件同步运动,从而使清洁装置在安装腔内运动,实现自动清理猫便的工作过程。
13.在其中一个实施例中,所述第二推动件本体上设有第二限位孔,所述清洁装置的一端插设在所述第二限位孔上,所述第二推动件用于推动所述清洁装置运动。通过在第二推动件本体上设有第二限位孔,清洁装置的一端插设在第二限位孔内,当第二推动件在驱动组件的驱使下运动时,能使清洁装置在安装腔内运动。
14.在其中一个实施例中,所述壳体组件上包括壳体和第二轨道组件,所述清洁装置包括滑轮组件和清洁件,所述第二轨道组件设置在所述壳体组件上,所述第二轨道组件上形成滑轨,所述滑轮组件与所述第二轨道组件相适配,所述滑轮组件设置在所述驱动装置上,所述驱动装置能驱动所述滑轮组件沿所述第二轨道组件上的所述滑轨运动,所述清洁件设置在滑轮组件上,所述清洁件用于清理所述结团猫砂。通过组合设置第二轨道组件和滑轮组件,第二轨道组件上设有供滑轮组件运动的滑轨,滑轮组件的一端设置在驱动装置上,滑轮组件的另一端与清洁件连接,使得滑轮组件在驱动装置的驱动下沿着滑轨进行运动,同时带动清洁件的运动实现清理猫便的工作过程,而通过设计滑轨的运动轨迹,使得滑轮组件带动清洁件在预设的轨道上运动从而达到预设的运动效果。
15.在其中一个实施例中,所述盆体组件可拆卸的设置在所述壳体组件上。通过将盆体组件可拆卸地设置在壳体组件上,方便宠物主人通过简单的拆卸盆体组件便能清洁猫砂盆,能更好地为爱宠提供舒适干净的环境。
附图说明
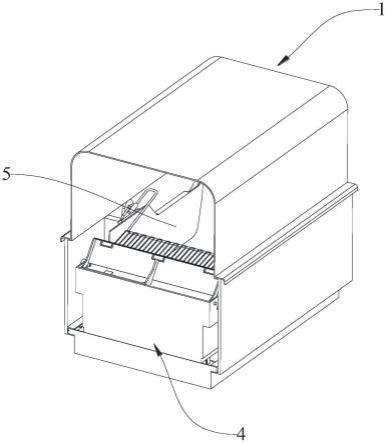
16.图1为自动清理猫便装置的立体图;
17.图2为打包装置的示意图;
18.图3为开盖组件位于第一位置的立体图;
19.图4为开盖组件位于第一位置的主视图;
20.图5为驱动装置的主视图;
21.图6为第二推动件的主视图;
22.图7为清洁装置的示意图;
23.图8为滑轮组件的示意图;
24.图9为驱动装置和清洁装置的安装示意图。
25.其中,附图标记与部件名称之间的对应关系为:
26.1壳体组件,11壳体,12第二轨道组件;
27.2驱动装置,201第二限位孔,21第一轨道组件,22驱动组件,23第二推动件,231第二推动件本体,232限位组件;
28.3清洁装置,31滑轮组件,32清洁件;
29.4打包装置,41盒体本体,42盖体组件,421盒盖,422连接杆,43开盖组件,431第一推动件,432驱动杆,401限位孔;
30.5盆体。
具体实施方式
31.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
32.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
33.下面参照附图描述本发明一些实施例所述自动清理猫便装置。
34.如图1至图9所示,本实施例公开了一种自动清理猫便装置,包括壳体组件1,壳体组件1内设有安装腔;驱动装置2,驱动装置2设置在壳体组件1上,驱动装置2至少部分位于安装腔内,驱动装置2能在安装腔内运动;清洁装置3,清洁装置3设置在驱动装置2上,清洁装置3位于安装腔内,驱动装置2用于驱使清洁装置3在壳体组件1上运动;盆体组件5,盆体组件5设置在壳体组件 1上,盆体组件5至少部分位于安装腔内,清洁装置3的部分延伸到盆体组件5 内。
35.本技术公开了一种自动清理猫便装置,通过在壳体组件上内设有盆体组件5,将猫砂放置于盆体组件5内。通过在壳体组件1上设置驱动装置2,驱动装置2用于驱动清洁装置3在壳体组件1上运动,由于猫砂在掩埋猫排泄物后会成团结块,当驱动装置2启动时,能使清洁装置3自动在安装腔内运动,在此过程中,清洁装置3延伸到盆体组件5的部分会对结团的猫砂进行筛选清理,实现自动清洁猫便的工作过程,避免人们手动清理猫便的繁琐以及可能存在的卫生问题。
36.如图1至图4所示,除上述实施例的特征以外,本实施例进一步限定了:还包括打包装置4,打包装置4与盆体组件5相邻设置,打包装置4用于收纳所需清理的猫便。通过设置打包装置4,当清洁装置3工作完成后,驱动装置2将清洁装置3收集到的结团猫砂送到打包装置4内进行打包收纳,便能完成整个自动清洁猫便的工作过程。该装置结构简单,能实现自动清洁猫便和自动打包的工作过程,人们只需要定时倒掉打包装置4内的猫便就能完成清理过程,避免人工清理猫便的不便。
37.除上述实施例的特征以外,本实施例进一步限定了:打包装置包括盒体本体41、盖体组件42和开盖组件43,盒体本体41与盆体组件5相邻设置,盒体本体41设有开口,盖体组件42设置在盒体本体41上,盖体组件42位于盒体本体41的开口处,开盖组件43设置在盒体本体41上,驱动装置2能驱动开盖组件43运动,开盖组件43相对于盒体本体41运动时至少具有第一位置,开盖组件43位于第一位置时能打开盖体组件42。通过在打包装置4上设有开盖组件 43,开盖组件43设置在盒体本体41上,用于打开处于盒体本体41开口处的盖体组件42,当驱动装置2在安装腔内运动时驱动清洁装置3运动,清洁装置3 在运动过程中对结团猫砂进行铲除,当驱动装置2运动到打包装置4一端,驱动开盖组件43的转动从而打开盖体组件42,结团猫砂随着清洁装置3的运动被送到打包装置4内。
38.除上述实施例的特征以外,本实施例进一步限定了:盖体组件42包括盒盖 421和连接杆422,连接杆422设置在盒体本体41上,连接杆422能相对盒体本体41转动,盒盖421设置在连接杆422上,盒盖421位于盒体本体41的开口处,开盖组件43位于第一位置时,盒盖421打开盒体本体41的开口。通过在盒体本体41上设有连接杆422,连接杆422能相对盒体本
体41转动,盒盖 421的一端通过连接杆422连接在盒体本体41上,当盒盖421翻转时能使连接杆422相对于盒体本体41转动,从而达到打开或关闭盒体本体41上开口的工作状态,当驱动装置2运动到打包装置4一端时能驱动开盖组件43的转动从而驱使盒盖421的翻转,此时,清洁装置3上的结团猫砂被放入打包装置4内收纳。
39.除上述实施例的特征以外,本实施例进一步限定了:开盖组件43包括第一推动件431和驱动杆432,第一推动件431设置在盒体本体41上,第一推动件 431能相对盒体本体41转动,盒体本体41上设有第一限位孔401,驱动杆432 与盖体组件42相邻设置,驱动杆432一端设置在第一推动件431上,驱动杆432 另一端穿过第一限位孔401,驱动杆432能沿限位孔401运动,驱动杆432至少部分位于盒体本体41的空腔内,开盖组件43位于第一位置时,驱动杆432驱动盖体组件42打开盒体本体41的开口。通过在开盖组件43上设置第一推动件431,第一推动件431能相对于盒体本体41进行转动,在第一推动件431的另一端设有驱动杆432,驱动杆432的另一端穿设在盒体本体41的第一限位孔401 上,驱动杆432的另一端与盖体组件42相邻设置,当驱动装置2运动到打包装置4的一端,同时推动第一推动件431的转动,设置在第一推动件431上的驱动杆432随之沿第一限位孔401往上运动,从而实现打开盖体组件42的工作过程。
40.如图5至图9所示,除上述实施例的特征以外,本实施例进一步限定了:驱动装置2包括第一轨道组件21,驱动组件22和第二推动件23,第一轨道组件21设置在壳体组件1上,驱动组件22设置在第一轨道组件21上,驱动组件22能相对于第一轨道组件21运动,第二推动件23设置在驱动组件22上,驱动组件22用于驱动第二推动件23的运动,清洁装置3设置在第二推动件23 上。通过设置驱动组件22作为本装置的动力源,驱动组件22能自动沿第一轨道组件21进行运动,通过将第二推动件23设置在驱动组件22上,驱动装置22 在第一轨道组件21上的运动从而带动第二推动件23沿第一轨道组件21的方向同步运动,达到驱动第二推动件23运动的效果,而推动件23的运动会驱动连接在驱动装置2上的清洁装置3在安装腔内运动,从而有效可靠地实现自动清理结团猫便的工作过程,避免人工清理的繁琐以及可能因此造成的卫生健康问题。
41.除上述实施例的特征以外,本实施例进一步限定了:驱动装置还包括传感器,传感器设置在驱动组件上,传感器用于感应和测量驱动装置2的位移情况。通过在驱动装置22上设置传感器,该传感器为位移传感器,通过位移传感器感应驱动装置2的运动情况,从而实现更智能的自动清理运动,使清理猫便驱动装置实现智能化和自动化。
42.除上述实施例的特征以外,本实施例进一步限定了:第二推动件23有两个,两个第二推动件23分别设置在驱动组件22的两端,第二推动件23包括第二推动件本体231和限位组件232,限位组件232与驱动组件22相适配,限位组件 232设置在第二推动件本体231上,驱动组件22驱动第二推动件本体231运动。通过在驱动组件22两端分别设置第二推动件23,能使驱动装置2的运动过程更加可靠和高效,第二推动件23上设有与驱动组件22相适配安装的限位组件232,使得第二推动件23固定在驱动组件22上,在驱动组件22运动的情况下,第二推动件23能随着驱动组件22同步运动,从而使清洁装置3在安装腔内运动,实现自动清理猫便的工作过程。
43.如图6所示,除上述实施例的特征以外,本实施例进一步限定了:第二推动件本体231上设有第二限位孔201,清洁装置的一端插设在第二限位孔201上,第二推动件用于推动
清洁装置3运动。通过在第二推动件本体231上设有第二限位孔301,清洁装置3的一端插设在第二限位孔301内,当第二推动件231在驱动组件22的驱使下运动时,能使清洁装置3在安装腔内运动。
44.如图8和图9所示,除上述实施例的特征以外,本实施例进一步限定了:壳体组件1上包括壳体11和第二轨道组件12,清洁装置3包括滑轮组件31和清洁件32,第二轨道组件12设置在壳体组件1上,第二轨道组件12上形成滑轨,滑轮组件31与第二轨道组件12相适配,滑轮组件31设置在驱动装置2上,驱动装置2能驱动滑轮组件31沿第二轨道组件12上的滑轨运动,清洁件32设置在滑轮组件31上,清洁件32用于清理猫便。通过组合设置第二轨道组件12 和滑轮组件31,第二轨道组件12上设有供滑轮组件31运动的滑轨,滑轮组件 31的一端设置在驱动装置2上,滑轮组件31的另一端与清洁件32连接,使得滑轮组件31在驱动装置2的驱动下沿着滑轨进行运动,同时带动清洁件32的运动实现清理猫便的工作过程,而通过设计滑轨的运动轨迹,使得滑轮组件31 带动清洁件32在预设的轨道上运动从而达到预设的运动效果。
45.如图1所示,除上述实施例的特征以外,本实施例进一步限定了:盆体组件5可拆卸的设置在壳体组件1上。通过将盆体组件5可拆卸地设置在壳体组件1上,方便宠物主人通过简单的拆卸盆体组件5便能清洁猫砂盆,能更好地为爱宠提供舒适干净的环境。
46.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
47.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1