除草机器人
1.本实用新型涉及智能化除草技术领域,具体而言,涉及一种除草机器人。
背景技术:
2.杂草与作物竞争水分、养分、和光照,滋生病虫害,导致粮食减产。田间杂草随机生长,且种类繁多。杂草防除方法主要有人工除草、化学除草剂除草和机械除草。其中,人工除草劳动强度大、效率低;化学除草剂除草方式通过喷施除草剂进行除草,过度施用除草剂易造成杂草抗药性,且污染环境;机械除草绿色环保,但容易误伤与杂草生长接近的作物;激光除草的方式能够利用激光进行除草,但是由于激光的照射范围有限,大面积除草时难以利用激光除草的方式。
3.目前,现有的除草机器人主要采用化学除草剂除草或者机械除草或者激光除草等单一方式进行除草,适用场景比较单一。
技术实现要素:
4.本实用新型的主要目的在于提供一种除草机器人,该除草机器人集成了机械除草、化学除草剂除草和激光除草三种方式,可以适用于不同场景。
5.为了实现上述目的,根据本实用新型的一个方面,提供了一种除草机器人,包括:固定板和与固定板连接的行走机构,除草机器人还包括:喷药装置,设置在固定板上,喷药装置包括药液输送系统和与药液输送系统连接的喷头;机械末端执行器,被配置为能够通过切割方式进行除草;激光发射器,设置在固定板上,激光发射器被配置为能够利用激光除草;视觉识别装置,包括设置在固定板下方的第一摄像头,视觉识别装置用于识别目标区域内的杂草和农作物,并获取杂草在目标区域内的位置信息;控制器,与视觉识别装置电连接,控制器接收视觉识别装置传递的信息,并控制机械末端执行器或喷药装置或激光发射器动作,以使除草机器人具有机械除草方式、化学除草剂除草方式和激光除草方式。
6.进一步地,除草机器人还包括:并联机构,包括与固定板连接的静平台以及用于安装喷头、机械末端执行器和激光发射器的动平台,动平台通过三个或者三个以上的机械臂结构与静平台连接,以实现竖直方向和/或水平方向的移动;旋转机构,设置在动平台上,旋转机构包括与动平台连接的第一驱动件以及与第一驱动件的输出轴驱动连接的旋转件,喷头、机械末端执行器和激光发射器均与旋转件连接,并且喷头、机械末端执行器和激光发射器绕旋转件的周向间隔布置,第一驱动件用于驱动除草机器人在机械除草方式、化学除草剂除草方式和激光除草方式之间切换。
7.进一步地,动平台上开设有与旋转件对应设置的避让通孔,旋转件位于避让通孔内,旋转件的中心轴线与动平台的中心线垂直设置,并且喷头、机械末端执行器和激光发射器沿旋转件的径向方向延伸。
8.进一步地,除草机器人还包括多个位置记忆装置,多个位置记忆装置设置在动平台上,多个位置记忆装置分别与激光发射器、喷头和机械末端执行器对应设置,以检测激光
发射器、喷头和机械末端执行器相对于动平台的位置。
9.进一步地,除草机器人包括与动平台连接的安装板,位置记忆装置包括检测件和被检件,除草机器人包括至少三个检测件以及至少三个被检件,至少三个检测件设置在安装板上,至少三个被检件位于旋转件上并与激光发射器、喷头和机械末端执行器对应设置,各检测件与控制器电连接,检测件根据对应的被检件确定激光发射器、喷头或者机械末端执行器的位置。
10.进一步地,检测件为接近开关或者微动开关,被检件为柱体。
11.进一步地,喷药装置还包括位于固定板上的药箱,药液输送系统包括输送管和设置在输送管上的输送泵,输送管的一端与药箱的出口连通,输送管的另一端与喷头连通。
12.进一步地,除草机器人还包括气动旋转头,气动旋转头包括定子和与定子转动连接的转子,转子上设有至少一个喷嘴,至少一个喷嘴与喷头连通,输送管的一端与定子连通。
13.进一步地,多个机械臂结构绕动平台的周向间隔布置,并且机械臂结构被配置为能够带动动平台沿竖直方向和/或水平方向移动;每个机械臂结构包括位于静平台上的第二驱动件、与第二驱动件驱动连接的驱动臂,以及与驱动臂通过球铰转动连接的执行臂,执行臂的一端与动平台转动连接。
14.进一步地,除草机器人包括多个机械末端执行器,多个机械末端执行器的结构不同,控制器选择性地与多个机械末端执行器中的一个连接。
15.应用本实用新型的技术方案,第一摄像头能够采集固定板下方的图像,视觉识别装置能够根据第一摄像头采集到的图像识别目标区域内的杂草和农作物的类型,以及杂草在目标区域内的位置信息,并且视觉识别装置能够将该信息传递至控制器,控制器根据上述的信息判断出该目标区域应采用的除草方式,并且控制激光发射器、喷药装置或者机械末端执行器进行除草,从而能够实现激光除草、机械除草和化学除草剂除草三种除草方式,这样,使用者可以根据实际环境选择最合适的除草方式;同时,行走机构能够带动固定板移动,从而在不同的地方进行除草。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
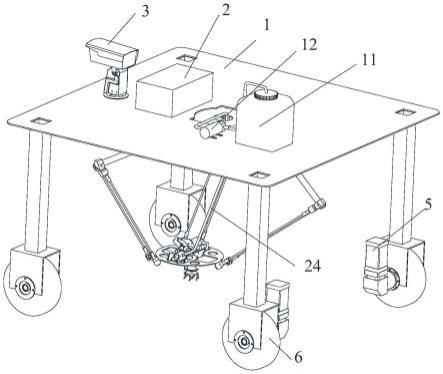
17.图1示出了根据本实用新型的除草机器人的实施例的结构示意图;
18.图2示出了图1的除草机器人的部分结构示意图(其中,未示出固定板及安装在固定板上的部分结构);
19.图3示出了图2的除草机器人的a处放大图;
20.图4示出了图3的除草机器人的左视图;
21.图5示出了图4的除草机器人的局部放大图;
22.图6示出了图3的除草机器人的气动旋转头的结构示意图;
23.图7示出了图3的除草机器人的另一个角度的示意图;
24.图8示出了图1的除草机器人的机械末端执行器的多种形式的结构示意图;
25.图9示出了图1的除草机器人的行走机构的结构示意图;以及
26.图10示出了图1的除草机器人的俯视图。
27.其中,上述附图包括以下附图标记:
28.1、固定板;5、主动轮电机;6、主动轮;8、电磁阀;11、药箱;12、输送泵;13、轮座; 14、主动轮轴;15、法兰盖;16、轴承;17、静平台;18、第二驱动件;19、驱动臂;20、球铰;21、执行臂;2、控制器;22、动平台;221、避让通孔;23、喷头;24、输送管;26、第一驱动件;27、位置记忆装置;271、检测件;272、被检件;28、旋转件;3、第一摄像头; 32、四爪式;33、扇叶式;34、机械末端执行器;35、安装板;36、气动旋转头;361、定子; 362、转子;363、喷嘴;37、弯片式;39、弯钩式;42、刀片式;43、激光发射器。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
30.需要说明的是,化学除草剂除草的方式一般通过喷施除草剂进行除草,但是过度施用除草剂会造成杂草抗药性,导致除草效果降低,并且除草剂会导致污染环境的问题;机械除草的方式绿色环保,但是针对和作物生长过于接近的杂草,采取机械除草的方式会导致误伤作物;激光除草的方式能够利用激光进行除草,激光将高密度的能量选择性地传递给杂草,会使得杂草细胞本身的水分和温度升高,导致杂草的生长延缓甚至停止,但是由于激光的照射范围有限,大面积除草时难以利用激光除草的方式。因此,对于不同的环境,应当选择相应的除草方式,从而能够在确保除草效果和除草效率的同时,避免出现污染环境和误伤作物的问题。
31.如图1至图3所示,本实用新型的实施例提供了一种除草机器人。除草机器人包括:固定板1和与固定板1连接的行走机构,除草机器人还包括喷药装置、机械末端执行器34、视觉识别装置和控制器2,其中,喷药装置设置在固定板1上,喷药装置包括药液输送系统和与药液输送系统连接的喷头23;机械末端执行器34被配置为能够通过切割方式进行除草;激光发射器43,设置在固定板1上,激光发射器43被配置为能够利用激光除草;视觉识别装置包括设置在固定板1下方的第一摄像头3,视觉识别装置用于识别目标区域内的杂草和农作物,并获取杂草在目标区域内的位置信息;控制器2与视觉识别装置电连接,控制器接收视觉识别装置传递的信息,并控制机械末端执行器34或喷药装置或激光发射器43动作,以使除草机器人具有激光除草、机械除草方式和化学除草剂除草方式。
32.通过上述设置,第一摄像头3能够采集固定板1下方的图像,视觉识别装置能够根据第一摄像头3采集到的图像识别目标区域内的杂草和农作物的类型,以及杂草在目标区域内的位置信息,并且视觉识别装置能够将该信息传递至控制器2,控制器2根据上述的信息判断出该目标区域应采用的除草方式,并且控制激光发射器43、喷药装置或者机械末端执行器34进行除草,从而能够实现激光除草、机械除草和化学除草剂除草三种除草方式,这样,使用者可以根据实际环境选择最合适的除草方式,从而能够适用于多种环境;同时,行走机构能够带动固定板1移动,从而在不同的地方进行除草。
33.本技术中,当第一摄像头3采集到杂草在在目标区域内的位置信息后,将上述信息传递给控制器2后,操作人员可以根据获取的图像和自身经验判断目标区域需要采取的除
草方式,比如,针对和作物生长过于接近的杂草,采用化学除草剂除草方式;反之,采用机械除草方式。
34.在本实用新型的一个实施例中,控制器2根据视觉识别装置采集到的信息控制执行对应的除草方式,当目标区域内的杂草比例大于1/3时,控制器2控制机械末端执行器34进行机械除草;当目标区域内的杂草比例小于1/3时,控制器2控制激光发射器43进行激光除草;当目标区域内的杂草和作物交织时,控制器2控制喷药装置进行化学除草剂除草。
35.如图2和图3所示,在本实用新型的实施例中,除草机器人还包括并联机构,并联机构包括与固定板1连接的静平台17以及用于安装激光发射器43、喷头23和机械末端执行器34 的动平台22,动平台22通过三个或者三个以上的机械臂结构与静平台17连接,以实现竖直方向和/或水平方向的移动。
36.在上述技术方案中,机械臂结构能够使动平台22相对于静平台17在竖直方向和水平方向上移动,这样,通过操作机械臂结构,使动平台22移动至杂草所在的位置,从而能够实现准确除草的效果;绕动平台22的周向间隔设置三个或者三个以上的机械臂结构,能够稳定地支撑动平台22。
37.如图2和图3所示,在本实用新型的实施例中,多个机械臂结构绕动平台22的周向间隔布置,每个机械臂结构包括位于静平台17上的第二驱动件18、与第二驱动件18驱动连接的驱动臂19,以及与驱动臂19通过球铰20转动连接的执行臂21,执行臂21的一端与动平台 22转动连接。
38.通过上述设置,第二驱动件18能够带动驱动臂19绕第二驱动件18的中心轴线转动,执行臂21与驱动臂19能够相对转动,从而能够带动动平台22相对于静平台17在竖直方向上和水平方向上移动。
39.如图3、图4和图7所示,在本实用新型的实施例中,除草机器人还包括旋转机构,旋转机构设置在动平台22上,旋转机构包括与动平台22连接的第一驱动件26以及与第一驱动件 26的输出轴驱动连接的旋转件28,激光发射器43、喷头23和机械末端执行器34均与旋转件 28连接,并且激光发射器43、喷头23和机械末端执行器34绕旋转件28的周向间隔布置,第一驱动件26用于驱动除草机器人在激光除草、机械除草方式和化学除草剂除草方式之间切换。
40.在上述技术方案中,动平台22上开设有与旋转件28对应的避让通孔221,这样,在第一驱动件26的驱动下,旋转件28能够绕自身的中心轴线转动,并且带动激光发射器43、喷头 23和机械末端执行器34同步转动,将激光发射器43或者喷头23或者机械末端执行器34旋转至与避让通孔221对应的位置,激光发射器43或者喷头23或者机械末端执行器34的一端能够穿过避让通孔221后对位于动平台22下方的杂草进行除草,从而能够实现在激光除草、机械除草和化学除草剂除草方式三种方式间切换的效果。
41.如图3和图4所示,在本实用新型的实施例中,旋转件28与动平台22垂直设置,并且喷头23、机械末端执行器34和激光发射器43沿旋转件28的径向方向延伸。
42.在上述技术方案中,激光发射器43、喷头23和机械末端执行器34呈放射状地分布在旋转件28上,旋转件28类似于“风扇”的结构,旋转件28在竖直面转动,从而在激光除草、机械除草和化学除草剂除草方式三种方式间切换。
43.如图3至图5所示,在本实用新型的实施例中,除草机器人还包括多个位置记忆装
置27,多个位置记忆装置27设置在动平台22上,多个位置记忆装置27分别与激光发射器43、喷头 23和机械末端执行器34对应设置,以检测激光发射器43、喷头23和机械末端执行器34相对于动平台22的位置。
44.在上述技术方案中,除草机器人包括与动平台22连接的安装板35,位置记忆装置27为三个,三个位置记忆装置分别与喷头23、激光发射器43和机械末端执行器34对应;每个位置记忆装置27包括一个检测件271和一个与该检测件271对应的被检件272,其中,检测件 271设置在安装板35上并且与控制器2电连接,被检件272位于旋转件28上;三个检测件 271沿旋转件28的径向依次布置,三个被检件272到旋转件28的中心轴线的距离不同,每个被检件272与对应的检测件271到旋转件28的中心轴线的距离相同。
45.通过上述设置,检测件271检测到对应的被检件272,从而能够确定与该被检件272对应的喷头23或者激光发射器43或者机械末端执行器34的位置。
46.在本实用新型的实施例中,检测件271为接近开关或者微动开关,被检件272为柱体。
47.在本实用新型的一个实施例中,如图5所示,检测件d、检测件e和检测件f自安装板 35的中心至边沿依次布置,被检件g与激光发射器43对应,并且被检件g与检测件e到安装板35的中心轴线的距离相同(指的是被检件g的中心与安装板35的中心轴线之间的距离等于检测件e的中心与安装板35的中心轴线之间的距离);被检件i与喷头23对应,并且被检件i与检测件f到安装板35的中心轴线的距离相同;被检件h与机械末端执行器34对应,并且被检件h与检测件d到安装板35的中心轴线的距离相同。这样,当被检件h移动至检测件d的检测行程范围内时,检测件d触发闭合;而另外两个检测件e和f并未发出信号,控制器2只检测到检测件d的触发信号,从而能够获取机械末端执行器34的位置信息,由于喷头23、激光发射器43以及机械末端执行器34绕旋转件28的周向间隔布置,控制器2能够得出此时机械末端执行器34朝向地面的信号,以便后续进行相应的除草。
48.如图10所示,在本实用新型的实施例中,喷药装置还包括位于固定板1上的药箱11,药液输送系统包括输送管24和设置在输送管24上的输送泵12,输送管24的一端与药箱11的出口连通,输送管24的另一端与喷头23连通。
49.在上述技术方案中,激光发射器43、喷头23以及机械末端执行器34绕旋转件28的周向间隔布置。
50.优选地,激光发射器43、喷头23和机械末端执行器34均匀布置在旋转件28上,也就是说,两两之间的夹角为120
°
。
51.如图2和图6所示,除草机器人还包括气动旋转头36(在本实用新型的实施例中,气动旋转头36的型号为:气液电一体滑环4进4出+6路2a电信号),气动旋转头36包括定子 361和与定子361转动连接的转子362,转子362上设有至少一个喷嘴363,至少一个喷嘴363 与喷头23连通,输送管24的一端与定子361连通。
52.在上述技术方案中,转子362能够随旋转件28同步转动,这样,输送管24输送的药液能够依次经过定子361和转子362后由喷嘴363进入喷头23。
53.由于气动旋转头36为现有技术,此处不再赘述气动旋转头36的具体结构。
54.如图3和图4所示,在本实用新型的实施例中,除草机器人还包括设置在喷头23处的电磁阀8。
55.通过上述设置,根据控制器2传递的信号,电磁阀8能够控制喷头23与气动旋转头36 的连通与断开。
56.如图1所示,在本实用新型的实施例中,除草机器人还包括设置在固定板1上方的第二摄像头,第二摄像头用于识别路径。
57.通过上述设置,第二摄像头与控制器2电连接,根据第二摄像头采集到的图像,控制器2 能够控制行走机构的行走路径。
58.如图8所示,在本实用新型的实施例中,除草机器人包括多个机械末端执行器34,多个机械末端执行器34的结构不同,控制器2选择性地与多个机械末端执行器34中的一个连接。
59.在上述技术方案中,机械末端执行器34有四爪式32、扇叶式33、弯钩式39、刀片式42 和弯片式37。
60.通过上述设置,根据实际环境的不同,可以选用不同的机械末端执行器34来进行机械除草。
61.如图1和图9所示,在本实用新型的实施例中,行走机构包括两个主动轮6,分别采用一个主动轮电机5驱动,主动轮6安装在主动轮轴14上,主动轮轴14的两端分别通过轴承16 和法兰盖15连接在轮座13上,主动轮轴14与主动轮电机5的输出轴连接,从而通过主动轮电机5的转动带动主动轮6的运动。
62.在上述技术方案中,为方便主动轮6的安装,轮座13的两端开豁口并采用法兰盖15连接,轮座13的两侧分别采用螺栓和螺母与法兰盖15连接。法兰盖15中装有轴承16,用于与主动轮轴14连接。主动轮轴14两端采用阶梯轴,用于固定轴承16的内圈,轴承16外圈由法兰盖15固定,从而完成主动轮的安装。
63.从以上的描述中,可以看出,本实用新型上述的实施例实现了如下技术效果:第一摄像头能够采集固定板下方的图像,视觉识别装置能够根据第一摄像头采集到的图像识别目标区域内的杂草和农作物的类型,以及杂草在目标区域内的位置信息,并且视觉识别装置能够将该信息传递至控制器,操作人员可以根据获取的图像和自身经验判断出该目标区域应采用的除草方式,并且控制器控制激光发射器或者喷药装置或者机械末端执行器进行除草,从而能够实现激光除草、机械除草和化学除草剂除草三种除草方式,这样,使用者可以根据实际环境选择最合适的除草方式,从而能够适用于多种环境;同时,行走机构能够带动固定板移动,从而在不同的地方进行除草。
64.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1