一种水果种植用自动化采摘设备的制作方法
1.本实用新型涉及技术领域,具体为一种水果种植用自动化采摘设备。
背景技术:
2.水果成熟后的收获期间需投入的劳力约占整个栽种过程的50%至70%。采摘作业质量的利害直接影响到水果的储藏、加工和销售,进而最后影响市场价钱和经济效益。水果收获拥有很强的时效性,属于典型的劳动密集型的工作,为了辅助工作人员快速采摘水果,会使用到各种采摘设备。
3.现今市场上的此类采摘设备种类繁多,基本可以满足人们的使用需求,但是依然存在一定的不足之处,现有的此类采摘设备的行走组件移动灵活度较差,在果园内移动、转向较为不便,同时该类设备的采摘高度较为受限,尤其是通过液压缸等驱动部件驱使夹爪升降,摆动时,还需另行布置油泵、油罐等部件,会造成设备的机体增大、使用灵活度受限以及使用成本的提高。
技术实现要素:
4.本实用新型的目的在于提供一种水果种植用自动化采摘设备,以解决上述背景技术中提出采摘设备的移动灵活性较差以及采摘高度受限的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种水果种植用自动化采摘设备,包括底盘和防护箱,所述底盘的两侧外壁上共安装有四组步进电机,所述步进电机的输出端安装有麦克纳姆轮,所述防护箱的顶端安装有立板,所述立板的顶端安装有第二电机,所述第二电机的输出端安装有螺纹轴,所述螺纹轴表面的一端通过螺母副安装有连接板,所述连接板一侧的外壁上安装有机械臂组件,所述机械臂的端部安装有裁断组件,所述机械臂组件底端的一侧安装有工字臂,所述工字臂一侧的外壁上安装有网框,所述立板一侧的外壁上安装有控制面板,控制面板内部单片机的输出端与步进电机、第二电机的输入端电性连接。
6.优选的,所述机械臂组件包括安装于所述连接板外壁上的第一双轴舵机,所述第一双轴舵机的输出端安装有转轴,所述转轴的两端固定有第一u型座,所述第一u型座的顶端安装有主支臂,所述主支臂的顶端安装有第二双轴舵机,所述第二双轴舵机的输出端安装有第二u型座,所述第二u型座一侧的外壁上固定有副支臂,所述副支臂远离第二u型座的一端安装有第三双轴舵机,所述第三双轴舵机的输出端安装有连接座,所述裁断组件安装于所述连接座的外壁上。
7.优选的,所述立板一侧的外壁上安装有轨道,所述轨道表面的一端滑动安装有滑台,滑台的外壁与连接板的背面固定连接。
8.优选的,所述主支臂以及副支臂为铝合金材质制得。
9.优选的,所述裁断组件包括安装于所述连接座外壁上的电动卡爪,所述电动卡爪两卡爪的外壁上分别安装有u型框和裁刀。
10.优选的,所述网框由圆环框以及尼龙绳网兜组成。
11.与现有技术相比,本实用新型的有益效果是:该一种水果种植用自动化采摘设备不仅使得设备可在果园内灵活移动,且体积较小,使用成本低,便于工作人员对果树高处的果实进行采摘,提升设备的采摘效率;
12.(1)通过设置有步进电机和麦克纳姆轮等相互配合的结构,通过四组步进电机以及麦克纳姆轮的不同转向组合实现设备多个方向的平移,以及顺时针、逆时针两种方向的自转,使得设备可在果园内灵活移动;
13.(2)通过设置有主支臂和副支臂等相互配合的结构,第二电机驱动螺纹轴转动,即连接板带动滑台在轨道的表面升降,进而连接板带动主支臂、副支臂以及裁断组件等部件上升,相比于汽缸等部件的驱动形式,该种形式设备体积较小,使用成本低;
14.(3)通过设置有第一双轴舵机和裁断组件等相互配合的结构,由第一双轴舵机、第二双轴舵机以及第三双轴舵机控制裁断组件的剪切角度,当裁断组件的卡爪端夹持住挂枝后,电动卡爪的两卡爪带动u型框、裁刀相互靠近,直至裁刀、u型框剪断挂枝,从而完成果实的采摘工作,便于工作人员对果树高处的果实进行采摘,提升设备的采摘效率。
附图说明
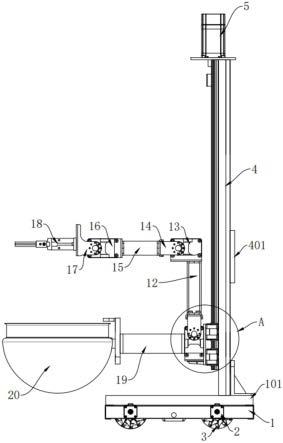
15.图1为本实用新型的主视结构示意图;
16.图2为本实用新型图1中a处放大结构示意图;
17.图3为本实用新型的侧视结构示意图;
18.图4为本实用新型的裁断组件俯视结构示意图;
19.图中:1、底盘;101、防护箱;2、步进电机;3、麦克纳姆轮;4、立板;401、控制面板;5、第二电机;6、螺纹轴;7、轨道;701、滑台;8、连接板;9、第一双轴舵机;10、转轴;11、第一u型座;12、主支臂;13、第二双轴舵机;14、第二u型座;15、副支臂;16、第三双轴舵机;17、连接座;18、裁断组件;1801、电动卡爪;1802、裁刀;1803、u型框;19、工字臂;20、网框。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1-4,本实用新型提供的一种实施例:一种水果种植用自动化采摘设备,包括底盘1和防护箱101,底盘1的两侧外壁上共安装有四组步进电机2,步进电机2的输出端安装有麦克纳姆轮3,通过控制面板401开启步进电机2进行工作,使得步进电机2驱动麦克纳姆轮3转动,通过四组步进电机2的不同转向组合实现设备前、后、左、右、左前、右前、右后、左后八种方向平移,以及顺时针、逆时针两种方向的自转;
22.通过步进电机2以及麦克纳姆轮3配合,可省去设备的转向机构,使得设备可在果园内灵活移动;
23.防护箱101的顶端安装有立板4,立板4的顶端安装有第二电机5,第二电机5的输出端安装有螺纹轴6,螺纹轴6表面的一端通过螺母副安装有连接板8,立板4一侧的外壁上安装有轨道7,轨道7表面的一端滑动安装有滑台701,滑台701的外壁与连接板8的背面固定连
接,轨道7为滑台701、连接板8运动导向,工作人员开启第二电机5驱动螺纹轴6转动,即连接板8带动滑台701在轨道7的表面升降;
24.连接板8一侧的外壁上安装有机械臂组件,机械臂的端部安装有裁断组件18,连接板8可带动主支臂12、副支臂15以及裁断组件18等部件上升,相比于汽缸等部件的驱动形式,该种形式设备体积较小,使用成本低;
25.机械臂组件包括安装于连接板8外壁上的第一双轴舵机9,第一双轴舵机9的输出端安装有转轴10,转轴10的两端固定有第一u型座11,第一u型座11的顶端安装有主支臂12,主支臂12的顶端安装有第二双轴舵机13,第二双轴舵机13的输出端安装有第二u型座14,第二u型座14一侧的外壁上固定有副支臂15,主支臂12以及副支臂15为铝合金材质制得,铝合金材质的主支臂12以及副支臂15可有效降低设备的机体重量;
26.副支臂15远离第二u型座14的一端安装有第三双轴舵机16,第三双轴舵机16的输出端安装有连接座17,裁断组件18安装于连接座17的外壁上,由第一双轴舵机9、第二双轴舵机13以及第三双轴舵机16控制裁断组件18的剪切角度,直至裁断组件18移动至果实的挂枝旁;
27.裁断组件18包括安装于连接座17外壁上的电动卡爪1801,电动卡爪1801两卡爪的外壁上分别安装有u型框1803和裁刀1802;
28.通过控制面板401开启电动卡爪1801工作,即电动卡爪1801的两卡爪带动u型框1803、裁刀1802相互靠近,直至裁刀1802、u型框1803剪断挂枝,从而完成果实的采摘工作;
29.机械臂组件底端的一侧安装有工字臂19,工字臂19一侧的外壁上安装有网框20,网框20由圆环框以及尼龙绳网兜组成,裁断组件18剪断后的挂枝以及果实可落至网框20内部,即完成果实的收集工作,通过网框20降低果实的坠落损伤;
30.立板4一侧的外壁上安装有控制面板401,控制面板401内部单片机的输出端与步进电机2、第二电机5的输入端电性连接。
31.本技术实施例在使用时,首先工作人员通过控制面板401开启步进电机2进行工作,使得步进电机2驱动麦克纳姆轮3转动,通过四组步进电机2的不同转向组合实现设备前、后、左、右、左前、右前、右后、左后八种方向平移,以及顺时针、逆时针两种方向的自转,使得设备可在果园内灵活移动,当设备移动至果树旁后,工作人员开启第二电机5驱动螺纹轴6转动,即连接板8带动滑台701在轨道7的表面升降,进而连接板8带动主支臂12、副支臂15以及裁断组件18等部件上升,相比于汽缸等部件的驱动形式,该种形式设备体积较小,使用成本低,在采摘水果时,由第一双轴舵机9、第二双轴舵机13以及第三双轴舵机16控制裁断组件18的剪切角度,直至裁断组件18移动至果实的挂枝旁,通过控制面板401开启电动卡爪1801工作,即电动卡爪1801的两卡爪带动u型框1803、裁刀1802相互靠近,直至裁刀1802、u型框1803剪断挂枝,从而完成果实的采摘工作,便于工作人员对果树高处的果实进行采摘,提升设备的采摘效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1