一种果树施肥机器人
本申请涉及智能农业,尤其涉及一种果树施肥机器人。
背景技术:
1、我国是农业大国,随着对农作物健康生长的要求不断提升,对施肥的需求不断增加。而我国施肥的普遍形式是将化肥采用撒播方式居多,目前市场上缺少智能识别作物,自主精准施肥的农业智能装备,传统的施肥方式,耗费人力物力巨大,而且效率较低,作业环境恶劣,施肥效果参差不齐,且易造成地下水等环境污染,也容易造成土壤板结。
2、目前,借助机器对果树施肥的方式有两类,第一类是手动挖坑施肥机,在室外农田、大棚等进行手动机械挖坑,然后人工进行施肥;第二类是内燃施肥机,由内燃机驱动施肥机进行施肥,农机操作者驾驶内燃施肥机在农田进行施肥,是如今应用最广泛的施肥机械。
3、然而,手动挖坑施肥机需要大量让人工进行操作,从而导致效率低下,并且肥料利用率也很低。操作人员容易疲劳,劳动强度并没有减轻;内燃施肥机由内燃机进行驱动,作业过程中会产生大量废气、废液以及噪声等污染,严重危害操作者健康和农作物生长。并且在作业过程中往往存在转向困难、易漏施肥等问题。该种施肥方式智能性不高、且效率低下、整体经济性不高。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本申请提供了一种果树施肥机器人。
2、第一方面,本申请提供了一种果树施肥机器人,包括:车体、行走机构、施肥机构和主控机构;
3、所述行走机构与所述车体的底部固定,并带动所述车体移动;
4、所述施肥机构与所述车体的顶面固定,所述施肥机构的控制端与所述主控机构电连接,所述施肥机构能够在所述主控机构的控制下施肥;
5、所述主控机构设置于所述车体的内部,所述主控机构能够控制所述行走机构移动至果树的位置,并控制所述施肥机构施肥。
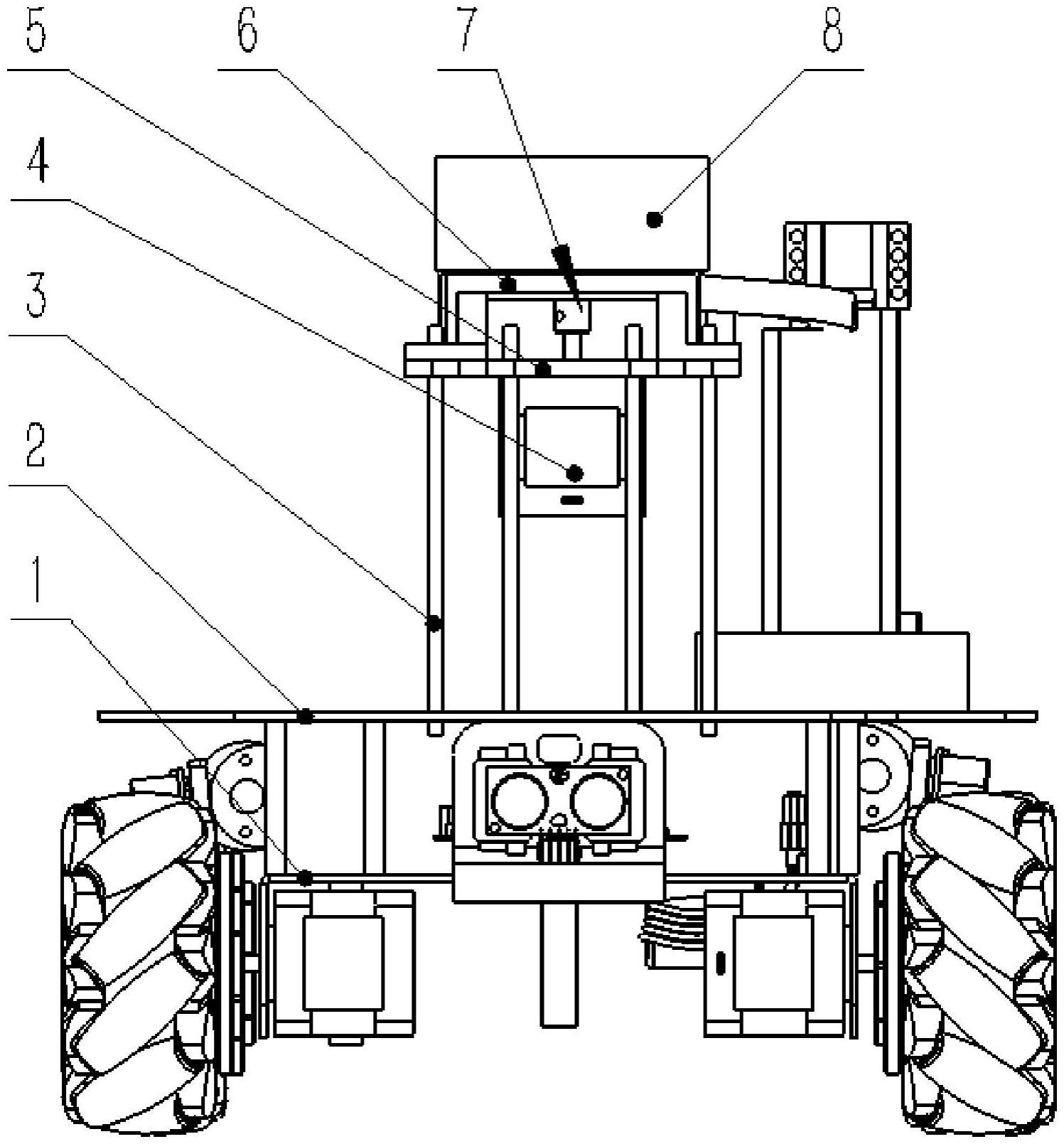
6、可选地,所述施肥机构包括:支撑螺杆、步进电机、支撑板、肥料挡板、法兰盘、肥料转盘和滑道;
7、所述支撑螺杆的底端与所述车体固定,所述支撑螺杆的顶端与所述支撑板固定,所述支撑板的上方设置有所述法兰盘,所述法兰盘与所述肥料转盘同轴固定,肥料挡板设置于所述肥料转盘的四周,所述肥料挡板形成的肥料室与所述滑道连通,所述滑道能够对肥料室内流出的肥料进行导向;
8、所述步进电机与所述支撑螺杆的中段固定,所述步进电机的输出轴与所述法兰盘固定,以带动所述法兰盘及所述肥料转盘转动。
9、可选地,所述行走机构包括:直流减速步进电机和麦克纳姆轮;
10、所述直流减速步进电机设置于所述车体底部,所述直流减速步进电机的输出轴与所述麦克纳姆轮的轴孔固定,以带动所述麦克纳姆轮转动。
11、可选地,所述果树施肥机器人还包括:视觉识别机构;
12、所述视觉识别机构设置于所述车体的上方,与所述主控机构电连接,所述视觉识别机构能够采集果树的位置信息及预设移动轨迹的轨迹信息;
13、所述主控机构能够基于所述位置信息控制所述行走机构向所述果树的位置移动,以及,基于所述轨迹信息控制所述行走机构沿所述预设移动轨迹移动。
14、可选地,所述果树施肥机器人还包括:视觉机构安装架;
15、所述视觉识别机构固定于所述视觉机构安装架上,所述视觉机构安装架固定于所述滑道上。
16、可选地,所述果树施肥机器人还包括:至少一个障碍物探测机构;
17、所述障碍物探测机构设置于所述车体的外侧壁,以检测周围的障碍物。
18、可选地,所述障碍物探测机构,包括:超声波传感器、第一连接螺钉、第二连接螺钉、第一超声波传感器固定板和第二超声波传感器固定板;
19、所述第二超声波传感器固定板与所述车体固定,所述第一超声波传感器固定板通过所述第二连接螺钉与所述第二超声波传感器固定板垂直固定,所述超声波传感器通过所述第一连接螺钉与所述第一超声波传感器固定板固定。
20、可选地,所述果树施肥机器人还包括:陀螺仪;
21、所述陀螺仪设置于所述车体上,以检测所述车体的倾斜角度。
22、可选地,所述果树施肥机器人还包括:稳压装置;
23、所述稳压装置设置于所述车体内,所述稳压装置能够对所述主控机构的供电电压进行稳压。
24、可选地,所述车体包括:上底板和下底板;
25、所述上底板和所述下底板之间通过支撑柱支撑,所述行走机构与所述下底板固定,所述施肥机构与所述上底板固定,所述主控机构设置于所述上底板和下底板之间。
26、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:
27、本申请实施例能够通过行走机构自动带动车体移动至果树的位置,并通过所述施肥机构施肥,无需人工手动施肥,提高施肥效率,通过施肥机构自动施肥,提高肥料利用率,系统以电能作为能源供应,作业过程中不会产生废气、废液以及噪声等污染。
技术特征:
1.一种果树施肥机器人,其特征在于,包括:车体、行走机构、施肥机构和主控机构;
2.根据权利要求1所述的果树施肥机器人,其特征在于,所述行走机构包括:直流减速步进电机(21)和麦克纳姆轮(9);
3.根据权利要求1所述的果树施肥机器人,其特征在于,所述果树施肥机器人还包括:视觉识别机构;
4.根据权利要求3所述的果树施肥机器人,其特征在于,所述果树施肥机器人还包括:视觉机构安装架(12);
5.根据权利要求1所述的果树施肥机器人,其特征在于,所述果树施肥机器人还包括:至少一个障碍物探测机构;
6.根据权利要求5所述的果树施肥机器人,其特征在于,所述障碍物探测机构,包括:超声波传感器(18)、第一连接螺钉(13)、第二连接螺钉(14)、第一超声波传感器固定板(19)和第二超声波传感器固定板(20);
7.根据权利要求1所述的果树施肥机器人,其特征在于,所述果树施肥机器人还包括:陀螺仪(16);
8.根据权利要求1所述的果树施肥机器人,其特征在于,所述果树施肥机器人还包括:稳压装置(15);
9.根据权利要求1所述的果树施肥机器人,其特征在于,所述车体包括:上底板(2)和下底板(1);
技术总结
本技术涉及一种果树施肥机器人,包括:车体、行走机构、施肥机构和主控机构;所述行走机构与所述车体的底部固定,并带动所述车体移动;所述施肥机构设置于所述车体的上方,与所述主控机构电连接,所述施肥机构能够在所述主控机构的控制下施肥;所述主控机构设置于所述车体的内部,所述主控机构能够控制所述行走机构移动至果树的位置,并控制所述施肥机构施肥。本申请实施例能够通过行走机构自动带动车体移动至果树的位置,并通过所述施肥机构施肥,无需人工手动施肥,提高施肥效率,通过施肥机构自动施肥,提高肥料利用率,系统以电能作为能源供应,作业过程中不会产生废气、废液以及噪声等污染。
技术研发人员:郭洪宇,张镇,由明峰,吴景海,郜思洋,姜利鹏,王乐,于金东,周靖博,邵奥利,王伟鹏,国敬雯,王毓涵,权梁
受保护的技术使用者:吉林农业大学
技术研发日:20220927
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!