一种自动套袋器
1.本实用新型涉及农业机械技术领域,具体涉及一种自动套袋器。
背景技术:
2.水果套袋最大的好处是改善外观品质和减少农药残留,改善外观品质突出表现在表面光洁和着色全面上,比如苹果,不套袋着色最高程度也就2/3,套袋后着色面积则可达到99%以上。外观品质的改善和农药残留的降低是我国水果得以打入国际市场的重要条件,特别是国内果品相对过剩,外国优质水果也在陆续进入我国的情况下,水果套袋是我国果品业发展的一个必要配套措施。水果套袋是水果市场无比重要的一环,不仅能降低水果在运输过程中的碰撞、擦伤,提高水果的运输和储藏的时间,还可以保持水果的新鲜度,实现水果销售利润的最大化。
3.现有的套袋工作都以人力为主,套袋时需要消费大量的人力、财力和时间,对较高树木的果实进行套袋的过程中,需要架梯,人员在梯子上对果实进行套袋,如若出现梯子断裂或操作不当,容易出现人员受伤等情况。人工套袋不仅速度慢,在套袋过程中套袋的质量也因人而异,不仅存在安全隐患,还影响着种植户的收益;有一些大型果园、蔬菜园也采用机械式工具进行套袋,但是手控操作的效率太过低下,电控操作的结构复杂,需要精密的元件和复杂的电路板,使用不便捷且损坏后很难维修,增加了成本。
技术实现要素:
4.本实用新型的目的是克服上述现有技术中存在的问题,提供一种自动套袋器,可以解决现有技术中,结构复杂,使用不便捷且损坏后很难维修,增加了成本的问题。
5.本实用新型的技术方案是:
6.一种自动套袋器,包括封口条为铁质的袋子,还包括:
7.手柄;
8.两个旋转臂,对称设置在手柄的顶部;
9.两个磁铁,用于吸附袋子的封口条,分别设置在两个旋转臂背离手柄的一端;
10.驱动机构,用于驱动两个旋转臂旋转,设置在手柄的顶部。
11.较佳地,所述驱动机构包括:
12.电机,设置在手柄内,所述电机的输出轴竖直向上,所述手柄上设有驱动电机启闭的第一把手;
13.固定框,设置在电机的输出轴上;
14.连接块,设置在固定框的侧壁,所述连接块与其中一个旋转臂连接;
15.传动结构,设置在固定框内,所述传动结构的输出端与电机的输出轴连接,输入端与转轴的一端连接,所述转轴的另一端与另一个旋转臂连接。
16.较佳地,所述传动结构包括:
17.第一锥齿轮,设置在固定框内壁底侧,所述电机的输出轴穿过固定框与第一锥齿
轮套装固定;
18.两个第二锥齿轮,分别可转动连接在固定框左右两侧,两个所述第二锥齿轮分别与第一锥齿轮相啮合,所述第二锥齿轮与固定框可转动连接;
19.第三锥齿轮,可转动连接在固定框内的顶侧,所述第三锥齿轮分别与两个第二锥齿轮相啮合,所述第三锥齿轮与固定框可转动连接,所述转轴的一端穿过固定框与第三锥齿轮套装固定。
20.较佳地,所述旋转臂包括:
21.第一支杆,其一端设有磁铁;
22.第二支杆,其一端与第一支杆的另一端连接,另一端与连接块、转轴连接。
23.较佳地,还包括:两组转动机构,分别设置在第二支杆与第一支杆、第二支杆与连接块或转轴之间,其中一组所述转动机构包括:
24.两个固定轴,分别设置在第二支杆、第一支杆的一端,两个所述固定轴的中部开设有连接孔;
25.扭簧,设置在两个固定轴之间,所述扭簧的两端分别与第二支杆、第一支杆固定;
26.螺钉,分别穿过两个固定轴中部的连接孔与固定轴固定。
27.较佳地,还包括:两组限位结构,分别设置在两个固定轴上,两组所述限位结构相对设置,所述限位结构包括:
28.挡块,设置在固定轴的侧壁;
29.支撑柱,设置在固定轴的侧壁。
30.较佳地,还包括:
31.延伸杆,为中空结构,可拆卸连接在手柄1的底部,所述延伸杆内设有铁丝,所述铁丝的一端与第一把手连接,另一端设有第二把手。
32.较佳地,所述延伸杆与手柄的可拆卸连接为螺纹连接。
33.与现有技术相比,本实用新型提供的一种自动套袋器,其有益效果是:
34.1、使用便捷:将袋子的封口条吸附于磁铁上后,直接将果实包裹,按下开关,旋转臂转动拉扯封口条进行旋转,借助旋转的过程中封口条对转臂的拉扯令转臂边旋转边向下运动,封口条顺着枝条向下旋转,令袋口完全封闭,避免雨水、灰尘和昆虫等杂质进入果袋;套袋过程中只需要一只手便可完成套袋,高处套袋时只需要连接延伸杆,按下开关便可进行套袋工作。
35.2、维修便捷:没有精密原件和复杂的电路板,零件均可拆换;大小可根据不同果实进行调整,也可更换更短的旋转臂进行使用。
36.3、适用性范围广:不仅可以用于柑桔、苹果等中小型果实套袋,同时可通过更换旋转臂或者调节旋转臂的角度,对葡萄、芒果等中大型水果进行套袋,包装袋加工简便,与当前市面上所销售的套袋加工过程接近,配套设备无需做过多修改便可生产。
附图说明
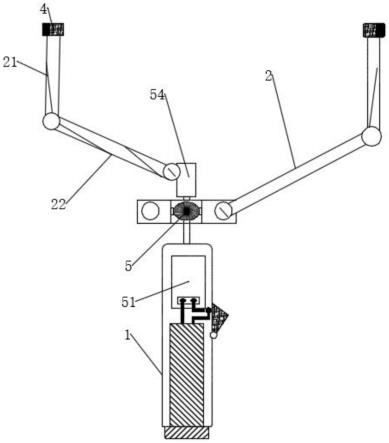
37.图1为本实用新型的结构示意图;
38.图2为本实用新型驱动机构的结构示意图;
39.图3为本实用新型转动机构的俯视图;
40.图4为本实用新型转动机构的侧视图;
41.图5为本实用新型所用套袋的结构示意图;
42.图6为本实用新型延伸杆的局部示意图。
具体实施方式
43.本实用新型提供了一种自动套袋器,下面结合图1到图6的结构示意图,对本实用新型进行说明,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
44.实施例1
45.如图1所示,本实用新型提供的一种自动套袋器,包括封口条为铁质的袋子,其特征在于,还包括:手柄1、旋转臂2、磁铁4、驱动机构5。手柄1用于握持住进行套袋;两个旋转臂2对称设置在手柄1的顶部;两个磁铁4用于吸附袋子的封口条,分别设置在两个旋转臂2背离手柄1的一端;驱动机构5用于驱动两个旋转臂2旋转,设置在手柄1的顶部。使用时,将袋子的封口条的两端分别固定在两个磁铁4上,然后利用驱动机构5带动两个旋转臂2旋转进行套袋,套袋结束后将封口条与磁铁4分离即可,铁质的封口条具有一定的可塑性,在套袋完成后会环绕成一圈,不会回弹至原来的形状。其中两个旋转臂2的旋转方向相反,且两个旋转臂2距离旋转中心的距离不等,可以绕着需要套袋的果蔬旋转大于一圈,密封效果好,且提高了套装效率。手柄1上设有控制驱动机构5工作的按钮,便于操作。本装置使用的套袋的袋子为封口条为铁质材料制成的袋子,非常常见,如图5所示,袋子为一片式的,在一端设置了铁质的封口条,套袋可由无纺布、蜡纸及纸长等制作,封口条的两端穿过套袋的两端且两端弯曲成“o”或“口”形状,与旋转臂2上设有磁铁4的一端相贴合,袋子末端带有透气孔,便于水果进行呼吸作用。
46.进一步的,如图2所示,所述驱动机构5包括:电机51、固定框52、连接块53、传动结构。电机51设置在手柄1内,所述电机51的输出轴竖直向上,所述手柄1上设有驱动电机51启闭的第一把手;固定框52设置在电机51的输出轴上;连接块53设置在固定框52的侧壁,所述连接块53与其中一个旋转臂2连接;传动结构设置在固定框52内,所述传动结构的输出端与电机51的输出轴连接,输入端与转轴54的一端连接,所述转轴54的另一端与另一个旋转臂2连接。驱动机构5的工作原理:电机51工作,带动固定框52转动,从而使得与固定框52连接的连接块53转动,带动其中一个旋转臂2与电机51的输出轴同向转动,然后通过传动结构使得转轴54与电机51的输出轴反向转动,带动另一个旋转臂2与电机51的输出轴反向转动,实现两个旋转臂2的旋转方向相反。
47.进一步的,如图2所示,所述传动结构包括:第一锥齿轮55、第二锥齿轮56、第三锥齿轮57。第一锥齿轮55设置在固定框52内壁底侧,所述电机51的输出轴穿过固定框52与第一锥齿轮55套装固定;两个第二锥齿轮56分别可转动连接在固定框52左右两侧,两个所述第二锥齿轮56分别与第一锥齿轮55相啮合,所述第二锥齿轮56与固定框52可转动连接;第三锥齿轮57可转动连接在固定框52内的顶侧,所述第三锥齿轮57分别与两个第二锥齿轮56相啮合,所述第三锥齿轮57与固定框52可转动连接,所述转轴54的一端穿过固定框52与第三锥齿轮57套装固定。其实现另一个旋转臂2与电机51的输出轴反向转动的原理为:电机51工作,带动第一锥齿轮55转动,则带动与其啮合的左右两侧的第二锥齿轮56与第一锥齿轮55反向转动,从而带动与两个第二锥齿轮56啮合的第三锥齿轮57也反向转动,实现另一个
旋转臂2与电机51的输出轴旋转的方向相反。其中,第一锥齿轮55与固定框52固定,两个第二锥齿轮56、第三锥齿轮57与固定框52可转动连接,在第一锥齿轮55转动时可以带动固定框52转动,实现其中一个旋转臂2与电机51的输出轴同向转动,且转轴54穿过固定框52与固定框52不接触,仅与第三锥齿轮57连接。
48.实施例2
49.作为在实施例1基础上的进一步的改进方案,所述旋转臂2包括:第一支杆21、第二支杆22。第一支杆21的一端设有磁铁4;第二支杆22的一端与第一支杆21的另一端连接,另一端与连接块53、转轴54连接。组成旋转臂2的两个支杆之间形成一定的角度,如同两个手与手腕弯曲一定角度一样,被套袋的果蔬位于两个旋转臂2之间,果柄位于第一支杆21设有磁铁4的一端。
50.其中,本实施例的其他结构与实施例1一致,只是对实施例1做出的优化。
51.实施例3
52.作为在实施例2基础上的进一步的改进方案,如图3-4所示,还包括:两组转动机构分别设置在第二支杆22与第一支杆21、第二支杆22与连接块53或转轴54之间,其中一组所述转动机构包括:固定轴23、扭簧24、螺钉。两个固定轴23分别设置在第二支杆22、第一支杆21的一端,两个所述固定轴23的中部开设有连接孔231;扭簧24设置在两个固定轴23之间,所述扭簧24的两端分别与第二支杆22、第一支杆21固定;螺钉分别穿过两个固定轴23中部的连接孔231与固定轴23固定。设置两组转动机构可以调节第二支杆22与第一支杆21、第二支杆22与连接块53或转轴54之间角度,主要还起到支撑回弹的作用,第二支杆22与连接块53或转轴54之间的扭簧弹力大于第二支杆22与第一支杆21之间的扭簧的扭力,在旋转的过程中,随着封口条缠绕,使得封口条两端的距离缩短,也就带动着两个旋转臂2向中间靠拢,在套袋结束后又因为扭簧的扭力,使得两个旋转臂2回弹至原来的位置、角度。其中,在两个旋转臂2旋转过程中第二支杆22与第一支杆21之间的扭簧先被压缩,两个旋转臂2之间夹角逐渐减小,借助旋转的过程中封口条对旋转臂2的拉扯令旋转臂2边旋转边收紧袋口,封口条顺着枝条向下旋转,令袋口完全封闭,避免雨水、灰尘和昆虫等杂质进入果袋。
53.进一步的,还包括:两组限位结构分别设置在两个固定轴23上,两组所述限位结构相对设置,且位置相互错开,所述限位结构包括:挡块25、支撑柱26。挡块25设置在固定轴23的侧壁;支撑柱26设置在固定轴23的侧壁。如图4所示,为了避免在旋转的过程中扭簧压缩使得第二支杆22与第一支杆21不稳定,出现两支杆碰撞的情况,设置了支撑柱26,当扭簧压缩到一定程度时,两个支撑柱26分别抵在相对的固定轴23上。如图3所示,为了避免套袋结构后,旋转臂2回弹后撑开的角度过大,设置了挡块25,在回弹至一定角度时,两个挡块25进行限位。
54.其中,本实施例的其他结构与实施例2一致,只是对实施例2做出的优化。
55.实施例4
56.作为在实施例1基础上的进一步的替换方案,还包括:延伸杆为中空结构,可拆卸连接在手柄1的底部,所述延伸杆内设有铁丝,所述铁丝的一端与第一把手连接,另一端设有第二把手,如图6所示,其中部可以设置定滑轮来帮助第一把手与第二把手的传动连接。当需要套袋高处的果蔬时,可以将延伸杆连接在手柄1的底部,增加手柄1的长度,进行套袋。套袋时,拉动第二把手,带动第一把手启闭电机工作。铁丝为高强度的铁丝,延伸杆由
1m-1.5m长的不锈钢管或铝管制成。
57.进一步的,所述延伸杆与手柄1的可拆卸连接为螺纹连接,也可以时别的可拆卸连接结构,如:卡接等。
58.其中,本实施例的其他结构与实施例1一致,只是对实施例1做出的优化。
59.本实用新型的优点在于,使用便捷:将袋子的封口条吸附于磁铁上后,直接将果实包裹,按下开关,旋转臂转动拉扯封口条进行旋转,借助旋转的过程中封口条对转臂的拉扯令转臂边旋转边向下运动,封口条顺着枝条向下旋转,令袋口完全封闭,避免雨水、灰尘和昆虫等杂质进入果袋;套袋过程中只需要一只手便可完成套袋,高处套袋时只需要连接延伸杆,按下开关便可进行套袋工作。成本低廉生产简单、维修便捷:仪器所使用材料可由塑料制成,也可由金属制成,材料来源广泛,没有精密原件和复杂的电路板,零件均可拆换;大小可根据不同果实进行调整,也可更换更短的旋转臂进行使用。适用性范围广:不仅可以用于柑桔、苹果等中小型果实套袋,同时可通过更换旋转臂或者调节旋转臂的角度,对葡萄、芒果等中大型水果进行套袋,包装袋加工简便,与当前市面上所销售的套袋加工过程接近,配套设备无需做过多修改便可生产。
60.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1