一种组织培养瓶的自动对心机构的制作方法
1.本实用新型涉及一种植物种苗组织培养接种的辅助工具,尤其涉及一种组织培养瓶的自动对心机构。
背景技术:
2.现在市场上的植物种苗组织培养接种大多是人工进行,存在以下缺陷:需要操作人员多,效率低,卫生条件不好控制,人与种苗接触后容易滋生细菌,会造成分苗后的植物死亡率高,影响经济效益。
3.因此,需要设计专门的自动化接种设备进行植物种苗组织培养接种,而输送线是自动化接种设备中用于组织培养瓶输送的必备结构,而输送线上如果缺少自动对心机构,就会导致组织培养瓶在输送线上的位置准确性得不到保障,勾针下去取苗失败的概率会很高。
技术实现要素:
4.本实用新型为了解决上述现有技术中存在的缺陷和不足,提供了一种可以实现植物组织培养瓶在输送线上到了需要的位置后精准定位,方便进行后续工作进行,提高勾针下去取苗成功率,且结构简单耐用,动作稳定可靠的组织培养瓶的自动对心机构。
5.本实用新型的技术方案:一种组织培养瓶的自动对心机构,包括自动对心底板、安装在自动对心底板中部的带座中心转轴、安装在带座中心转轴上的带座轴承、滑动连接在自动对心底板上的一对定位卡爪以及驱动定位卡爪张开和合拢的定位气缸,定位气缸的活塞杆端部连接其中一个定位卡爪,两个定位卡爪通过带座轴承和连杆组件连接在一起实现同步相对或者相向运动。
6.本实用新型可以实现植物组织培养瓶在输送线上到了需要的位置后精准定位,方便进行后续工作进行,提高勾针下去取苗成功率,且结构简单耐用,动作稳定可靠。
7.优选地,每个定位卡爪通过两个滑块滑动连接在自动对心底板上,两个滑块通过滑块安装板连接在一起,所述滑块安装板固定在定位卡爪的底部,所述自动对心底板上设有配合滑块的直线导轨。
8.该种结构确保定位卡爪在自动对心底板上的滑动平稳可靠,进一步确保其张开和合拢的稳定性和可靠性。
9.优选地,所述定位卡爪包括卡爪横板和固定在卡爪横板一端的卡爪立板,所述卡爪横板的另一端设有配合组织培养瓶的弧形内凹,所述滑块安装板固定在卡爪立板的底部。
10.该种结构确保定位卡爪可以很好的抓紧组织培养瓶,同时方便定位卡爪的安装。
11.优选地,所述连杆组件包括两根相互配合的连杆,其中一根连杆的一端通过杆端关节轴承连接其中一块滑块安装板的中部,另一端通过杆端关节轴承连接带座轴承的底座一侧,另外一根连杆的一端通过杆端关节轴承连接另外一块滑块安装板的中部,另一端通
过杆端关节轴承连接带座轴承的底座另一侧。
12.采用该种连杆组件,只需采用一个定位气缸作为动力实现两个定位卡爪的同步联动,且联动稳定可靠。
13.优选地,定位气缸的活塞杆通过一浮动接头连接其中一块卡爪立板的下部中间。
14.该种结构确保定位气缸的活塞杆与卡爪立板的连接牢靠性。
15.优选地,所述卡爪横板的高度高于组织培养瓶输送线的高度,组织培养瓶输送线位于两块卡爪横板之间的下方,且组织培养瓶输送线的宽度与组织培养瓶的宽度相匹配。
16.该种结构确保输送线上输送的组织培养瓶可以很好的被定位卡爪抓紧进行精确定位。
17.优选地,所述定位气缸通过一气缸座安装在自动对心底板上,定位气缸的活塞杆水平设置。
18.该种结构确保定位气缸驱动定位卡爪的动作更加平稳可靠。
19.优选地,所述气缸座位于自动对心底板的一端,所述直线导轨的一端与自动对心底板的另一端齐平,直线导轨的另一端与气缸座之间留有间距。
20.该种结构使得其结构紧凑,布局合理,进一步确保其动作稳定可靠。
21.本实用新型可以实现植物组织培养瓶在输送线上到了需要的位置后精准定位,方便进行后续工作进行,提高勾针下去取苗成功率,且结构简单耐用,动作稳定可靠。
附图说明
22.图1为本实用新型中定位卡爪合拢时的结构示意图;
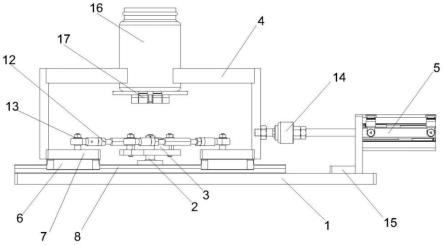
23.图2为本实用新型的侧面示意图;
24.图3为本实用新型中定位卡爪张开时的俯视示意图;
25.图4为本实用新型的剖面示意图;
26.图5为本实用新型中定位卡爪的结构示意图;
27.图中1.自动对心底板,2.带座中心转轴,3.带座轴承,4.定位卡爪,5.定位气缸,6.滑块,7.滑块安装板,8.直线导轨,9.卡爪横板,10.卡爪立板,11.弧形内凹,12.连杆,13.杆端关节轴承,14.浮动接头,15.气缸座,16.组织培养瓶,17.组织培养瓶输送线。
具体实施方式
28.下面结合附图对本实用新型作进一步详细的说明,但并不是对本实用新型保护范围的限制。
29.如图1-5所示,一种组织培养瓶的自动对心机构,包括自动对心底板1、安装在自动对心底板1中部的带座中心转轴2、安装在带座中心转轴2上的带座轴承3、滑动连接在自动对心底板1上的一对定位卡爪4以及驱动定位卡爪4张开和合拢的定位气缸5,定位气缸5的活塞杆端部连接其中一个定位卡爪,两个定位卡爪通过带座轴承3和连杆组件连接在一起实现同步相对或者相向运动。每个定位卡爪通过两个滑块6滑动连接在自动对心底板1上,两个滑块6通过滑块安装板7连接在一起,滑块安装板7固定在定位卡爪4的底部,自动对心底板1上设有配合滑块6的直线导轨8。定位卡爪6包括卡爪横板9和固定在卡爪横板9一端的卡爪立板10,卡爪横板9的另一端设有配合组织培养瓶16的弧形内凹11,滑块安装板7固定
在卡爪立板10的底部。连杆组件包括两根相互配合的连杆12,其中一根连杆的一端通过杆端关节轴承13连接其中一块滑块安装板的中部,另一端通过杆端关节轴承13连接带座轴承3的底座一侧,另外一根连杆的一端通过杆端关节轴承13连接另外一块滑块安装板的中部,另一端通过杆端关节轴承13连接带座轴承3的底座另一侧。定位气缸5的活塞杆通过一浮动接头14连接其中一块卡爪立板的下部中间。卡爪横板9的高度高于组织培养瓶输送线17的高度,组织培养瓶输送线17位于两块卡爪横板之间的下方,且组织培养瓶输送线17的宽度与组织培养瓶16的宽度相匹配。定位气缸5通过一气缸座15安装在自动对心底板1上,定位气缸5的活塞杆水平设置。气缸座15位于自动对心底板1的一端,直线导轨8的一端与自动对心底板1的另一端齐平,直线导轨8的另一端与气缸座15之间留有间距。
30.本实用新型的工作过程如下:开始时定位气缸缩回,定位卡爪张开,组织培养瓶在输送带上到了预设的定位卡爪的中间位置时候,输送带停止,定位气缸伸出,在连杆组件和带座轴承的作用下,定位气缸的活塞杆伸出推动与其连接的定位卡爪向另外一个定位卡爪移动,从而拉动带座轴承一侧的连杆动作,该连杆带动带座轴承转动,从而拉动带座轴承另外一侧的连杆动作,然后拉动另外一个定位卡爪相对移动,实现定位卡爪的合拢,把位置停的不是很准的组织培养瓶自动定位到卡爪的中心位置,就可以进行下步的取苗动作;
31.反之,定位气缸的活塞杆缩回,拉动与其连接的定位卡爪向另外一个定位卡爪的反方向移动,从而拉动带座轴承一侧的连杆动作,该连杆带动带座轴承反向转动,从而推动带座轴承另外一侧的连杆动作,然后推动另外一个定位卡爪相向移动,实现定位卡爪的张开。
32.本实用新型中带座中心转轴、带座轴承、定位气缸、连杆、杆端关节轴承和浮动接头均为市面采购的常规部件,其具体结构和动作过程均为常规手段,故不作细述。
33.本实用新型采用连杆组件配合带座轴承的结构带动两个定位卡爪相对或者相向运动实现定位卡爪的合拢或者张开,结构简单,只需一个定位气缸作为动力即可;另外,也是因为只有一个动力,动作可以实现完全同步,所以稳定可靠耐用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1