一种可直接输送苹果的气动式末端执行器
本技术涉及农业果蔬采摘机器人末端执行器的开发领域,特别是苹果采摘机器人的末端执行器的。
背景技术:
1、近年来,国内外的农业机器人发展比较迅速,采摘机器人的研究和开发也取得了不少成果。末端执行器作为农业果蔬采摘机器人的重要组成部分,国内外许多研究学者对末端执行器进行大量研究,但是由于果蔬柔嫩,一直无法实现实用化和商品化。在多数果蔬采摘作业中,均需通过末端执行器对果蔬实现摘取,因此避免夹持损伤成为实现末端执行器无损采摘的重点和关键。末端执行器对于农业的现代化发展具有重要意义。
技术实现思路
1、本实用新型提供一种可直接输送苹果的气动式末端执行器,采取柔软膨胀气囊夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,而且有特定的输果管道可实现采摘后直接输送,节省时间;通过调整不同的气压,可实现各种中小型球状果实的采摘,对实现果实采摘机器人的实用化和商品化大有裨益。
2、为了解决上述技术问题,本实用新型公开了一种可直接输送苹果的气动式末端执行器,包括末端执行器和气动系统。末端执行器主要包括壳体、膨胀气囊和输果管道;气动系统主要包括气泵、安全阀、真空电磁阀、两位三通电磁阀、气压传感器、三通气动接头和软管,气泵、两位三通电磁阀和膨胀气囊通过软管连接,安全阀和气压传感器通过三通气动接头连接到主路上,真空电磁阀通过软管连接到两位三通电磁阀,气泵提供气动力,安全阀对管路进行压力保护,采用两位三通电磁阀可实现膨胀气囊的进气,完成苹果夹持,采用真空电磁阀实现膨胀气囊的稳压和排气,完成苹果的采摘和松开。
3、作为本实用新型的一种优选技术方案,所述的两位三通电磁阀通过更换不同的控制位置状态,进而实现膨胀气囊的进气,完成对苹果的夹持。
4、作为本实用新型的一种优选技术方案,所述的真空电磁阀通过更换不同的控制状态,实现膨胀气囊的稳压和排气。
5、作为本实用新型的一种优选技术方案,所述的壳体的末端连接部位有均匀分布的四个螺栓孔,可以连接到各种中小型球形果实采摘机器人的机械臂上,提高通用性。
6、作为本实用新型的一种优选技术方案,所述的膨胀气囊属于柔性材料,不仅可以膨胀夹持苹果,而且自身柔性可以更好地保护苹果,避免刚性夹持苹果,导致损伤苹果。
7、作为本实用新型的一种优选技术方案,所述的输果管道可以将采摘下来的苹果直接输送到收集箱,无需通过机械臂将末端执行器送到收集箱上方进行送果,大大节省完成一次采摘的时间,提高采摘效率。
8、本实用新型所达到的有益效果是:
9、1.该末端执行器采用柔性膨胀气囊,避免苹果在采摘时产生刚性接触受到损伤。
10、2.该末端执行器采用气力驱动,夹持速度快,而且工作介质无污染。
11、3.该末端执行器装有输果管道,可实现在完成采摘后,苹果顺着输果管道滑到收集箱中,无需通过机械臂将末端执行器送到收集箱上方进行送果,大大提高了采摘效率。
12、4.该末端执行器通用性好,可广泛应用于柑橘、梨、桃等球形果实采摘。
13、5.该末端执行器结构简单紧凑小巧,可靠性高,成本低廉。
技术特征:
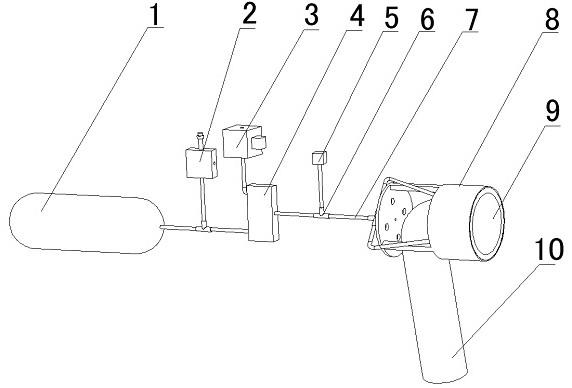
1.一种可直接输送苹果的气动式末端执行器,包括末端执行器和气动系统,末端执行器主要包括壳体(8)、膨胀气囊(9)和输果管道(10);气动系统主要包括气泵(1)、安全阀(2)、真空电磁阀(3)、两位三通电磁阀(4)、气压传感器(5)、三通气动接头(6)和软管(7),其特征是气泵(1)、两位三通电磁阀(4)和膨胀气囊(9)通过软管(7)连接,安全阀(2)和气压传感器(5)通过三通气动接头(6)连接到主路上,真空电磁阀(3)通过软管(7)连接到两位三通电磁阀(4),气泵(1)提供气动力,安全阀(2)对管路进行压力保护,采用两位三通电磁阀(4)可实现膨胀气囊(9)的进气,完成苹果夹持,采用真空电磁阀(3)实现膨胀气囊(9)的稳压和排气,完成苹果的采摘和松开,本末端执行器采取柔软膨胀气囊(9)夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,而且有输果管道(10)可实现采摘后直接输送,节省时间;通过调整不同的气压,可实现中小型球状果实的采摘,对实现果实采摘机器人的实用化和商品化大有裨益。
2.根据权利要求1所述的一种可直接输送苹果的气动式末端执行器,其特征是所述的两位三通电磁阀(4)通过更换不同的控制位置状态,进而实现膨胀气囊(9)的进气,完成对苹果的夹持。
3.根据权利要求1所述的一种可直接输送苹果的气动式末端执行器,其特征是所述的真空电磁阀(3)通过更换不同的控制状态,实现膨胀气囊(9)的稳压和排气。
4.根据权利要求1所述的一种可直接输送苹果的气动式末端执行器,其特征是所述的壳体(8)的末端连接部位有均匀分布的四个螺栓孔,可以连接到中小型球形果实采摘机器人的机械臂上,提高通用性。
5.根据权利要求1所述的一种可直接输送苹果的气动式末端执行器,其特征是所述的膨胀气囊(9)属于柔性材料,不仅可以膨胀夹持苹果,而且自身柔性可以更好地保护苹果,避免刚性夹持苹果,导致损伤苹果。
6.根据权利要求1所述的一种可直接输送苹果的气动式末端执行器,其特征是所述的输果管道(10)可以将采摘下来的苹果直接输送到收集箱,无需通过机械臂将末端执行器送到收集箱上方进行送果,大大节省完成一次采摘的时间,提高采摘效率。
技术总结
本技术公开了一种可直接输送苹果的气动式末端执行器,包括末端执行器和气动系统。末端执行器主要包括壳体、膨胀气囊和输果管道;气动系统主要包括气泵、安全阀、真空电磁阀、两位三通电磁阀、气压传感器、三通气动接头和软管,气泵、两位三通电磁阀和膨胀气囊通过软管连接,安全阀和气压传感器通过三通气动接头连接到主路上,真空电磁阀通过软管连接到两位三通电磁阀,气泵提供气动力,安全阀对管路进行压力保护,采用两位三通电磁阀可实现膨胀气囊的进气,完成苹果夹持,采用真空电磁阀实现膨胀气囊的稳压和排气,完成苹果的采摘和松开。本末端执行器采取柔软膨胀气囊夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,而且有特定的输果管道可实现采摘后直接输送,节省时间;通过调整不同的气压,可实现各种中小型球状果实的采摘,对实现果实采摘机器人的实用化和商品化大有裨益。
技术研发人员:陈军,陈超,胡广锐,姜彦武,骆通运,赵开元,孙丽娟
受保护的技术使用者:西北农林科技大学
技术研发日:20221126
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!