一种智能喷雾机器人的制作方法
本技术属于智能装备,具体涉及一种智能喷雾机器人。
背景技术:
1、目前在农业种植时,由于自然条件原因,我们不可避免的对绿植蔬菜等植物进行喷雾灌溉和施药,需要大量的劳动力,而且施药对人体危害比较大。现代农业相对于传统农业而言,从单一作物种植转向了立体作物种植,具体的,在一个种植架中包含若干层植物,但现有的通过水管将喷头对高处的植物进行喷洒,使处于低矮处的植物无法得到喷洒或水量较小,需要对矮小植物进行二次喷雾作业,效率较低。此外,现有用于植物喷洒的机器人,通常只有一个喷雾管,有些喷雾管高度不能调节,这种机器人一次只能喷洒种植架中一排植物,无法满足多层种植架中同时对多层植物进行喷洒作业的需求。
技术实现思路
1、本实用新型通过提供一种智能喷雾机器人,以解决现有喷雾机器人无法同时对多层植物进行喷洒作业的技术问题。
2、为实现上述目的,本实用新型的技术解决方案是:
3、一种智能喷雾机器人,包括机身以及喷雾装置;
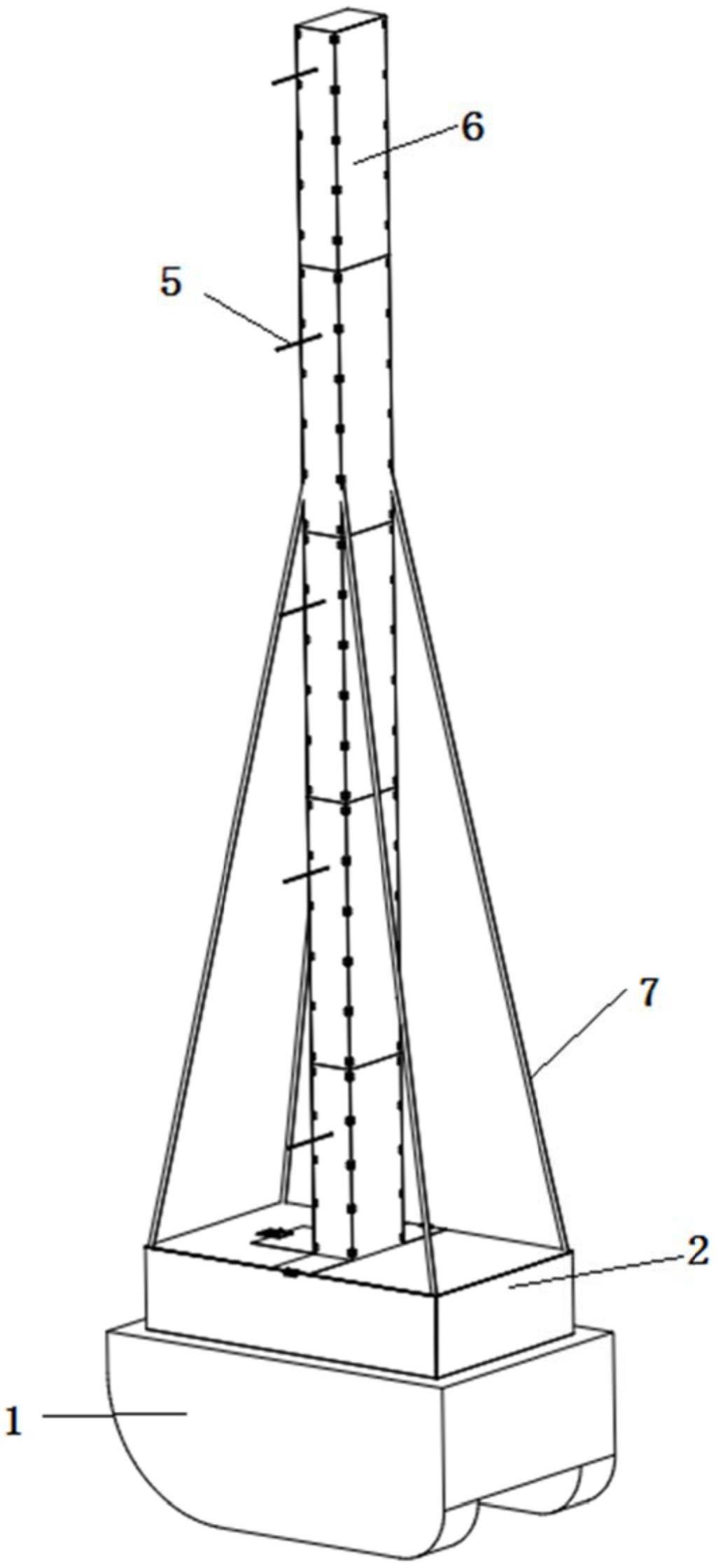
4、所述机身包括移动装置,所述移动装置上方设有水箱,所述水箱上方设有支撑架;
5、所述喷雾装置包括水槽、水泵、超声波雾化器和喷雾管;所述水槽安装在支撑架上,所述水泵的进水管与水箱连接,水泵的出水管与水槽连接,所述水槽中设置有超声波雾化器,超声波雾化器产生的水雾通过喷雾管喷出。
6、优选地,所述喷雾管设有多个,各个喷雾管之间设有20cm以上的间距。
7、优选地,多个所述喷雾管的方向一致。
8、优选地,所述水泵的出水管与水槽连接处设有阀门。
9、优选地,所述支撑架由4根立柱通过横杆焊接而成,所述水槽设置在4根立柱上;并且在支撑架的四个面上还设有盖板。
10、优选地,所述盖板上在设有喷雾管的相对侧预留有安装框,所述安装框用于安装电风扇。
11、优选地,所述机身还设有控制系统,所述控制系统包括驱动模块、激光导航模块和控制模块,所述驱动模块、激光导航模块均与控制模块连接,所述控制模块接收所述激光导航模块发送的信息后生成驱动信息,通过驱动模块控制移动装置按照设定轨迹移动。
12、优选地,所述移动装置上设有防撞条。
13、优选地,所述移动装置为履带车。
14、优选地,所述水箱与支撑架之间设有斜撑,所述斜撑连接于水箱的四个角。
15、本实用新型的有益效果是:
16、本申请通过移动装置驱动喷雾机器人行走,在移动装置上安装支撑架,在支撑架上设置多层水槽和喷雾管,通过水泵将水箱中的水抽入水槽,利用超声波雾化器产生水雾通过喷雾管喷出,可以同时满足对种植架上的多层植物进行喷洒作业,有效提高作业效率。
技术特征:
1.一种智能喷雾机器人,其特征在于,包括机身以及喷雾装置;
2.根据权利要求1所述的智能喷雾机器人,其特征在于,所述喷雾管设有多个,各个喷雾管之间设有20cm以上的间距。
3.根据权利要求1所述的智能喷雾机器人,其特征在于,多个所述喷雾管的方向一致。
4.根据权利要求1所述的智能喷雾机器人,其特征在于,所述水泵的出水管与水槽连接处设有阀门。
5.根据权利要求1-4任一项所述的智能喷雾机器人,其特征在于,所述支撑架由4根立柱通过横杆焊接而成,所述水槽设置在4根立柱上;并且在支撑架的四个面上还设有盖板。
6.根据权利要求5所述的智能喷雾机器人,其特征在于,所述盖板上在设有喷雾管的相对侧预留有安装框,所述安装框用于安装电风扇。
7.根据权利要求6所述的智能喷雾机器人,其特征在于,所述机身还设有控制系统,所述控制系统包括驱动模块、激光导航模块和控制模块,所述驱动模块、激光导航模块均与控制模块连接,所述控制模块接收所述激光导航模块发送的信息后生成驱动信息,通过驱动模块控制移动装置按照设定轨迹移动。
8.根据权利要求7所述的智能喷雾机器人,其特征在于,所述移动装置上设有防撞条。
9.根据权利要求8所述的智能喷雾机器人,其特征在于,所述移动装置为履带车。
10.根据权利要求9所述的智能喷雾机器人,其特征在于,所述水箱与支撑架之间设有斜撑,所述斜撑连接于水箱的四个角。
技术总结
本技术提供一种智能喷雾机器人,属于智能装备技术领域。所述的智能喷雾机器人,包括机身以及喷雾装置;所述机身包括移动装置,所述移动装置上方设有水箱,所述水箱上方设有支撑架;所述喷雾装置包括水槽、水泵、超声波雾化器和喷雾管;所述水槽安装在支撑架上,所述水泵的进水管与水箱连接,水泵的出水管与水槽连接,所述水槽中设置有超声波雾化器,超声波雾化器产生的水雾通过喷雾管喷出。本申请通过移动装置驱动喷雾机器人行走,在移动装置上安装支撑架,在支撑架上设置多层水槽和喷雾管,通过水泵将水箱中的水抽入水槽,利用超声波雾化器产生水雾通过喷雾管喷出,可以同时满足对种植架上的多层植物进行喷洒作业,有效提高作业效率。
技术研发人员:黄崎
受保护的技术使用者:国际稻都智能装备(湖南)有限公司
技术研发日:20221209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!