蔬菜收割机的制作方法
本发明涉及收割洋葱、大蒜、百合根等鳞茎蔬菜、胡萝卜等根类蔬菜的蔬菜收割机。
背景技术:
1、以往,作为将洋葱、大蒜、百合根等鳞茎蔬菜(鳞茎作物)等蔬菜作为收割对象作物的蔬菜收割机,已知如下结构的蔬菜收割机:对于田地中栽培的鳞茎蔬菜,一边夹持从土壤内的鳞茎部向地上伸出的茎叶部一边将其拔出而输送,在其输送过程中切断茎叶部而收割鳞茎部。这种蔬菜收割机具备:输送装置,其以夹持茎叶部的悬吊状态而对从地里拔出的鳞茎蔬菜进行输送;以及切断装置,其将鳞茎蔬菜的茎叶部切断而使其与鳞茎部分离(例如,参照专利文献1)。
2、专利文献1中公开了如下结构:对4垄洋葱的茎叶以2垄为单位一起拉起并夹持、且将其拔出而输送,在输送中途切断作物的茎叶部,使得切断的茎叶部降落到构成左右的行驶装置的履带上。切断的茎叶部被茎叶引导件引导,并排出到在蔬菜收割机中设置于比构成作物的收割宽度的收割范围更靠左右外侧的履带行驶装置上。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2007-43964号公报
技术实现思路
1、发明要解决的技术问题
2、根据专利文献1公开的结构,存在如下问题:左右的履带行驶装置驶出到作物的收割范围的外侧,因此在没有垄的所谓的连续垄的田地中难以进行收割。
3、即,在左右的履带行驶装置位于作物的收割范围的外侧的结构的情况下,在机体行驶的同时进行的收割作业是在使履带行驶装置位于以平行状形成有多个垄的田地中相邻的垄间的垄沟的状态下而进行的。因此,在没有垄的连续垄的田地中,根据进行收割作业的机体的移动路径的不同,位于机体的左右一侧或左右两侧的未收割的垄的部分会被履带行驶装置踩踏,有时难以进行收割。
4、本发明是鉴于上述那样的问题而完成的,其目的在于提供一种即使在连续垄的田地中也能够获得良好的收割作业性的蔬菜收割机。
5、用于解决技术问题的手段
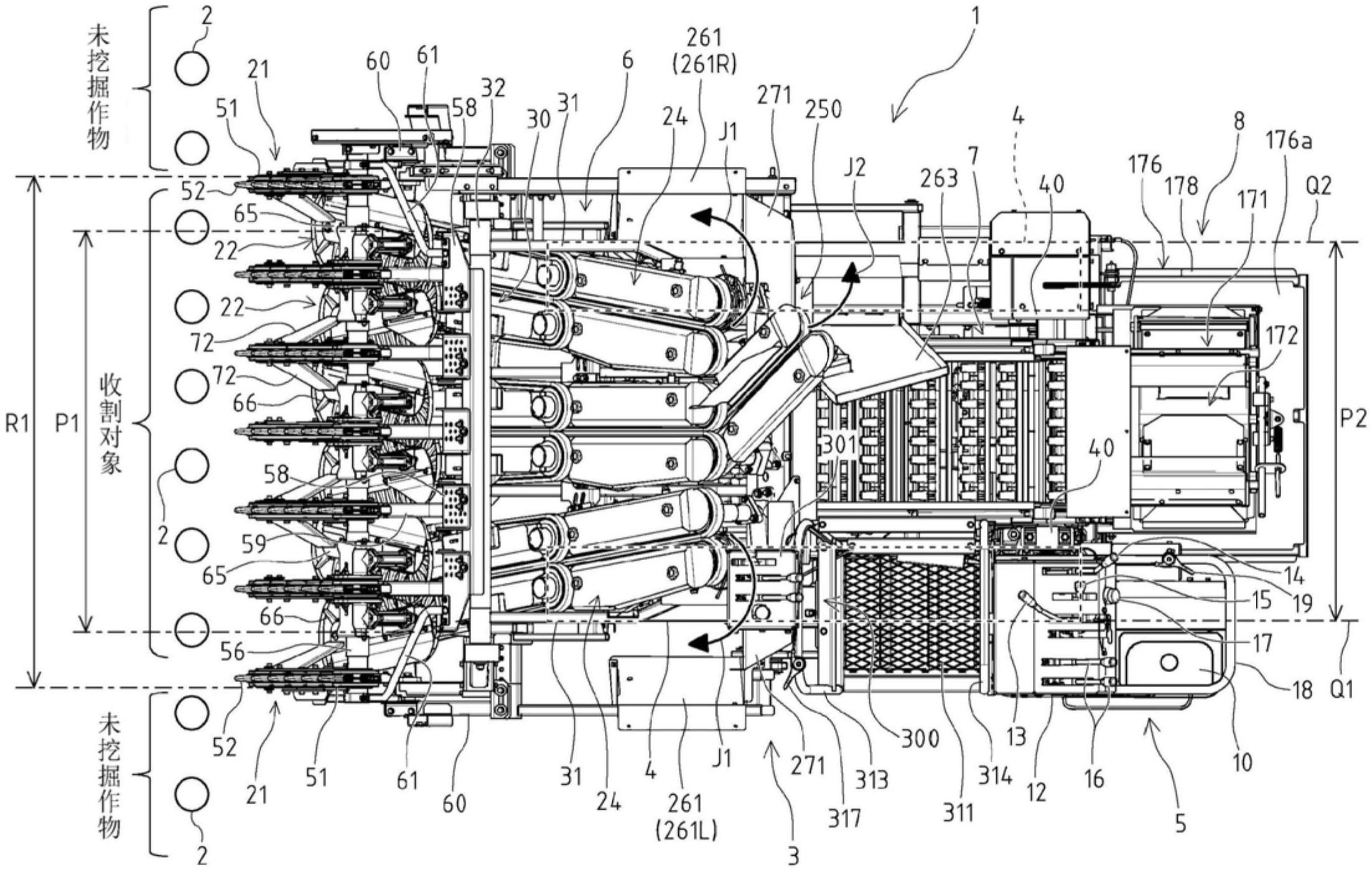
6、关于本发明所涉及的蔬菜收割机,其从土壤中拔出并收割蔬菜,其中,所述蔬菜收割机具备:行驶机体,其具有左右一对行驶装置;拔出输送装置,其从土壤中拔出蔬菜,并一边夹持拔出的蔬菜的茎叶部一边将其向后上方输送;茎叶切断装置,其将由所述拔出输送装置输送的蔬菜的茎叶部切断;以及输送装置,其接收由所述拔出输送装置输送的蔬菜并将其向后上方输送,所述左右一对行驶装置在机体宽度方向上位于所述拔出输送装置对蔬菜的收割范围内。
7、关于本发明的另一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,作为所述拔出输送装置,具备位于左右外侧的外侧拔出输送装置以及位于左右方向中间部的内侧拔出输送装置,作为将由所述茎叶切断装置切断的茎叶部向左右外侧排出的排叶装置,具备第一排叶装置和第二排叶装置,所述第一排叶装置将从由所述外侧拔出输送装置输送的蔬菜切断的茎叶部排出,所述第二排叶装置将从由所述内侧拔出输送装置输送的蔬菜切断的茎叶部向左右一侧排出。
8、关于本发明的又一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,在所述行驶机体的左右另一侧设置有对蔬菜收割机进行操作的操作部。
9、关于本发明的又一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,在所述行驶机体的左右另一侧设置有对蔬菜收割机进行操作的辅助操作部。
10、关于本发明的又一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,所述辅助操作部设置于位于左右另一侧的所述行驶装置的上方。
11、关于本发明的又一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,具备将从所述排叶装置排出的茎叶部向所述行驶装置的上表面引导的引导部。
12、关于本发明的又一方式所涉及的蔬菜收割机,在所述蔬菜收割机的基础上,所述行驶装置是履带式的行驶装置。
13、发明效果
14、根据本发明,在连续垄的田地中也能够获得良好的收割作业性。
技术特征:
1.一种蔬菜收割机,其从土壤中拔出并收割蔬菜,其特征在于,
2.根据权利要求1所述的蔬菜收割机,其特征在于,
3.根据权利要求2所述的蔬菜收割机,其特征在于,
4.根据权利要求3所述的蔬菜收割机,其特征在于,
5.根据权利要求4所述的蔬菜收割机,其特征在于,
6.根据权利要求2~5中任一项所述的蔬菜收割机,其特征在于,
7.根据权利要求1~6中任一项所述的蔬菜收割机,其特征在于,
技术总结
在连续垄的田地中也能获得良好的收割作业性。一种蔬菜收割机(1),其从土壤中拔出并收割洋葱(2),其中,所述蔬菜收割机(1)包括:行驶机体(3),其具有左右一对履带行驶装置(4);拔出输送装置(24),其从土壤中拔出洋葱(2),并一边夹持拔出的洋葱(2)的茎叶部(2b)一边将其向后上方输送;茎叶切断装置,其切断由拔出输送装置(24)输送的洋葱(2)的茎叶部(2b);以及输送机(7),其接收由拔出输送装置(24)输送的洋葱(2)并将其向后上方输送,左右一对履带行驶装置(4)在机体宽度方向上位于拔出输送装置(24)对洋葱(2)的收割范围内(收割宽度(R1)的范围内)。
技术研发人员:渡边章人,稻垣晴三,内田裕治,高田研人
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!