智能割草系统及自移动设备的制作方法
本发明涉及智能工作机领域,具体涉及一种智能割草系统及自移动设备。
背景技术:
1、随着移动机器人技术的发展,近年来越来越多的机器人走进了人们的日常生活中。能自动在用户草坪中进行割草、自主返充、自主避障的智能割草机器人作为一种自移动设备也逐渐开始普及。这种智能割草机器人可以将用户从清洁、维护草坪等繁重且枯燥的家务生活中解放出来,越来越受到用户的青睐。作为一种自移动的智能机器人,其定位精度的高低决定了设备作业效果的好坏。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供一种能融合多种定位技术实现精准定位、建图以及导航的智能割草机。
2、为了实现上述目标,本发明采用如下的技术方案:
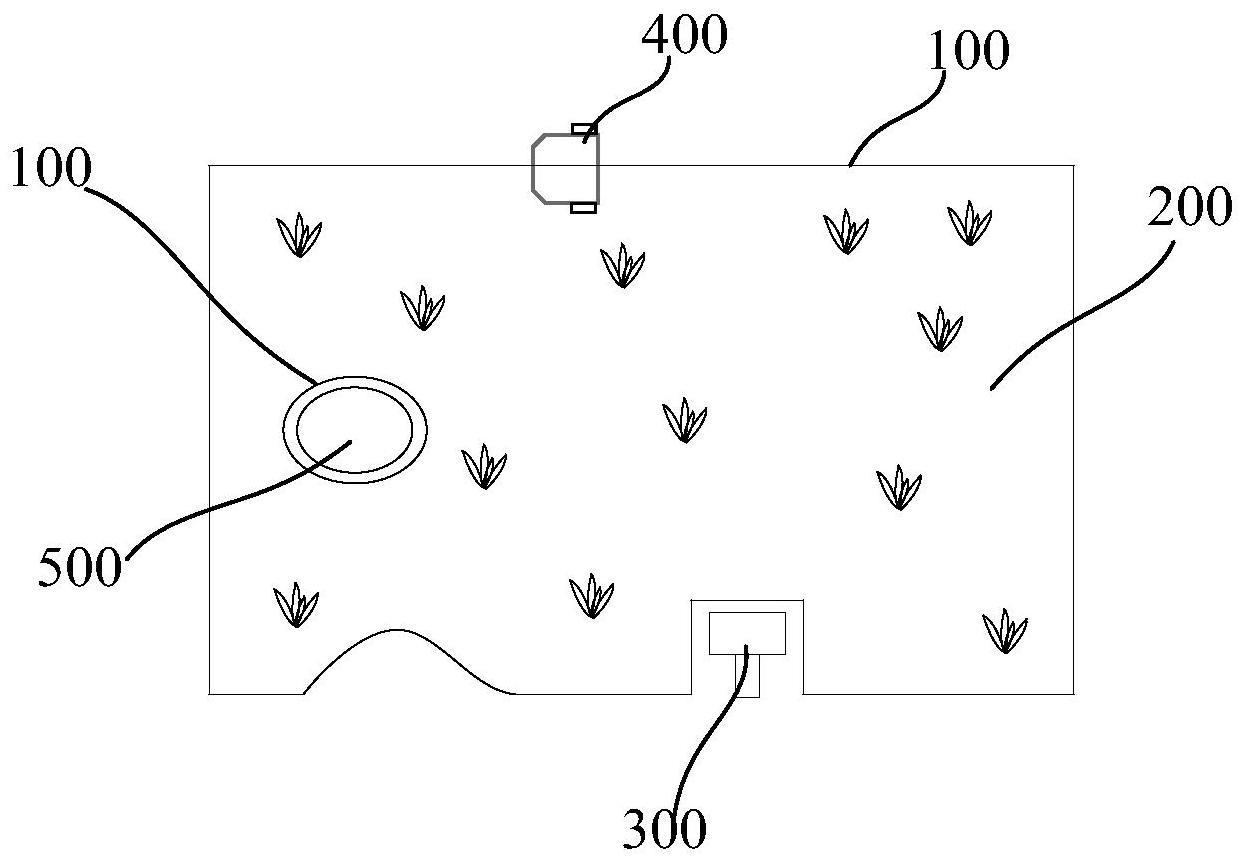
3、一种智能割草系统,包括由边界线所限定的工作区域以及智能割草设备,还包括:定位模块,用于获取所述智能割草设备在所述边界线上或所述工作区域内的坐标信息,所述坐标信息包括位置信息和姿态信息;所述定位模块至少包括rtk定位单元和多个融合定位单元;所述rtk定位单元具有固定解时,采用所述rtk定位单元标记所述位置信息,以及采用第一融合定位单元标记所述姿态信息;所述rtk定位单元具有非固定解时,采用第二融合定位单元标记所述位置信息,以及采用第三融合定位单元标记所述姿态信息;控制模块,至少与所述定位模块连接,以控制所述定位模块切换不同的定位单元采集所述坐标信息;建图模块,用于根据所述位置信息和所述姿态信息构建边界地图;路径规划模块,用于基于所述边界地图规划所述智能割草设备的运行路径。
4、进一步的,所述第一融合定位单元或所述第二融合定位单元或所述第三融合定位单元包括视觉传感器、激光雷达、imu、里程计中的至少两个。
5、进一步的,所述控制模块被配置为:对所述工作区域进行区域划分以获得多个第一子工作区域,并控制所述激光雷达在每个所述第一子工作区域内获取子区域点云数据。
6、进一步的,所述控制模块被配置为,按照所述运行路径和所述子区域点云数据控制所述智能割草设备在所述工作区域内运行割草。
7、进一步的,所述路径规划模块,根据所述rtk定位单元具有非固定解时所述定位模块记录的坐标信息规划所述运行路径的方向边的方向。
8、进一步的,所述建图模块,用于根据所述rtk定位单元具有非固定解时所述定位模块记录的坐标信息拟合出至少一段边界线曲线;所述方向边的方向与最长的边界线曲线的中点切线方向的夹角大于或等于45°且小于或等于135°。
9、进一步的,所述路径规划模块,还用于根据所述边界地图的凹凸性或所述边界地图中的孤岛边界将所述边界地图划分为多个子边界地图,每个子边界地图对应一个第二子工作区域;以及,基于所述子边界地图规划所述智能割草设备在所述第二子工作区域内的运行路径。
10、一种自移动设备,所述自移动设备在由边界线所包围的工作区域内进行工作,所述自移动设备包括:定位模块,用于获取所述自移动设备在所述边界线上或所述工作区域内的坐标信息,所述坐标信息包括位置信息和姿态信息;所述定位模块至少包括rtk定位单元和多个融合定位单元;所述rtk定位单元具有固定解时,采用所述rtk定位单元标记所述位置信息,以及采用第一融合定位单元标记所述姿态信息;所述rtk定位单元具有非固定解时,采用第二融合定位单元标记所述位置信息,以及采用第三融合定位单元标记所述姿态信息;控制模块,至少与所述定位模块连接,以控制所述定位模块切换不同的定位单元采集所述坐标信息;建图模块,用于根据所述位置信息和所述姿态信息构建边界地图;路径规划模块,用于基于所述边界地图规划所述自移动设备的运行路径。
11、进一步的,所述第一融合定位单元或所述第二融合定位单元或所述第三融合定位单元包括视觉传感器、激光雷达、imu、里程计中的至少两个。
12、进一步的,所述路径规划模块,根据所述rtk定位单元具有非固定解时所述定位模块记录的坐标信息规划所述运行路径的方向边的方向。
技术特征:
1.一种智能割草系统,包括由边界线所限定的工作区域以及智能割草设备,
2.根据权利要求1所述的智能割草系统,其特征在于,
3.根据权利要求2所述的智能割草系统,其特征在于,
4.根据权利要求3所述的智能割草系统,其特征在于,
5.根据权利要求1所述的智能割草系统,其特征在于,
6.根据权利要求5所述的智能割草系统,其特征在于,
7.根据权利要求1所述的智能割草系统,其特征在于,
8.一种自移动设备,所述自移动设备在由边界线所包围的工作区域内进行工作,所述自移动设备包括:
9.根据权利要求8所述的自移动设备,其特征在于,
10.根据权利要求8所述的自移动设备,其特征在于,
技术总结
本申请公开一种智能割草系统及自移动设备,该系统包括由边界线限定的工作区域及智能割草设备,还包括:定位模块,用于获取割草设备在边界线上或工作区域内的坐标信息,坐标信息包括位置信息和姿态信息;定位模块至少包括RTK定位单元和多个融合定位单元;RTK定位单元具有固定解时,采用RTK定位单元标记位置信息,以及采用第一融合定位单元标记姿态信息;RTK定位单元具有非固定解时,采用第二融合定位单元标记位置信息,以及采用第三融合定位单元标记姿态信息;控制模块,至少与定位模块连接,以控制定位模块切换不同的定位单元采集坐标信息;建图模块,根据位置信息和姿态信息构建边界地图;路径规划模块,基于边界地图规划智能割草设备的运行路径。
技术研发人员:石灵健,陈伟鹏
受保护的技术使用者:南京泉峰科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!