多轴树障清理机器人的制作方法
本发明涉及电力系统维护领域,尤其涉及一种多轴树障清理机器人。
背景技术:
1、配网线路在户外经常受到树障的困扰,生长较快的树木容易影响配网线路的输电工作,生长过快的枝叶会对配网线路造成严重的损坏,目前树障清理作业分为人工清理和树障清除机器人自动清理,而人工清理不仅工作效率低,还存在较大的安全风险,而现有的树障清除机器人的切割距离受限,导致切割修剪范围小,且树障清理机器人的切割机构自由度少,可控性不高,局限性较大,难以适用于复杂的树障环境,降低树障清理效果和灵活度,无法对树障彻底清除干净。
2、树障清理机器人的切割机构因为需要频繁对树障进行切割修剪,导致切割机构的部件容易造成损坏,所以需要对切割机构进行拆卸维修或更换,现有的树障清理机器人难以将切割机构拆卸,且这类机器人普遍整体体积庞大,在不使用时需要占据较大空间进行存放,难以进行运输和携带。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种便于对切割机构进行安装或拆卸、存放占地面积小、灵活便携、灵活度高、可控性高且适用于复杂树障环境的多轴树障清理机器人。
2、本发明所采用的技术方案为:
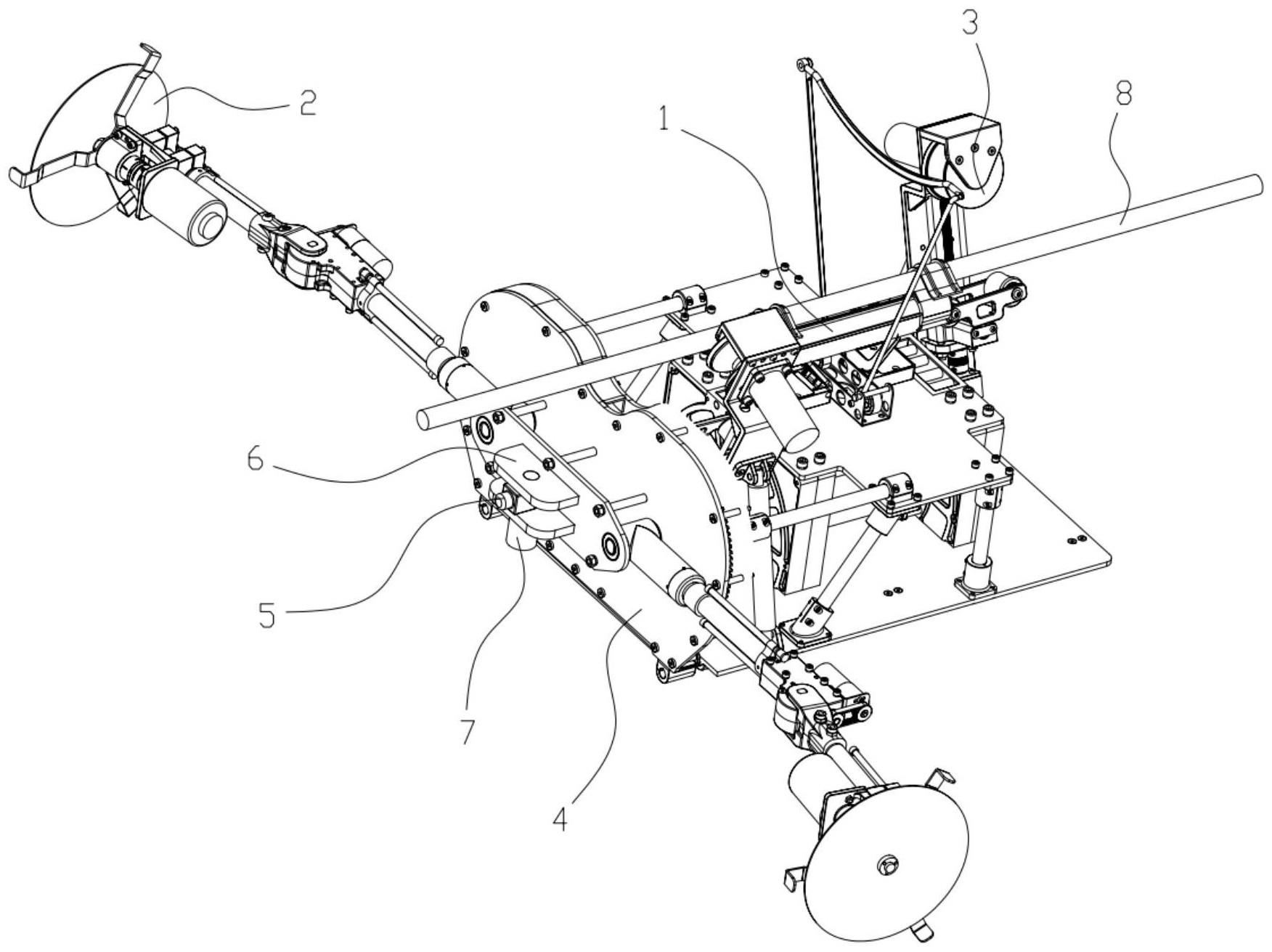
3、一种多轴树障清理机器人,包括卷扬机构、两个切割机构、若干个走线机构以及控制两个切割机构进行相对开合摆动的开合机构,卷扬机构和走线机构均设置于开合机构的后侧,若干个走线机构分布在卷扬机构的两侧,切割机构包括依次连接的旋转部、第一伸缩部、摆动部、第二伸缩部以及切割部,旋转部与开合机构连接。
4、作为优选,旋转部包括轴套、筒体、旋转电机、连接管、径向轴承、轴向轴承以及压盖;
5、轴套与开合机构连接,筒体呈垂直连接于轴套的一侧,旋转电机设置于筒体内,且其输出端连接有卡块,卡块的底部设有第一限位片,且其外侧设有销键,连接管套接于卡块的外侧,且其一端与第一限位片抵接,连接管的内侧设有第一销槽,销键滑动卡接于第一销槽内,径向轴承设置于连接管与筒体之间,连接管的中部外侧设有第二限位片,轴向轴承的上下两侧分别与压盖以及第二限位片抵接,压盖与筒体通过螺纹连接,连接管贯穿于压盖后与第一伸缩部连接。
6、作为优选,连接管与第一伸缩部之间连接有快拆组件,快拆组件包括安装板、插接块、线圈、弹簧、静铁芯以及动铁块,安装板的一侧与第一伸缩部固定连接,另一侧与插接块固定连接,插接块包括内管和外管,内管与外管之间设有插接槽,连接管的另一端滑动嵌接于插接槽内,静铁芯设置于内管内,线圈设置于静铁芯的外侧,弹簧的两端分别与静铁芯以及动铁块连接,连接管的内侧设有第二销槽,内管上设有通槽,动铁块滑动连接于通槽内,且其远离静铁芯的一端活动嵌接于第二销槽内。
7、作为优选,开合机构包括壳体、轨道齿板、主动齿轮、从动齿轮和开合电机,轨道齿板有两个,两个轨道齿板分别通过第一转轴设置在壳体内,第一转轴的两端分别与壳体转动连接,主动齿轮与从动齿轮啮合连接,主动齿轮与一个轨道齿板啮合连接,从动齿轮与另一个轨道齿板啮合连接,开合电机的输出轴与主动齿轮固定连接,两个切割机构分别与两根第一转轴连接。
8、作为优选,第一伸缩部包括第一气缸和安装盒,第一气缸的伸缩端连接有第一固定块,且其另一端与旋转部连接,第一固定块固定于安装盒内,摆动部包括摆动架、摆动电机、蜗杆以及与蜗杆啮合连接的蜗轮,摆动电机固定于安装盒的外侧,蜗杆和蜗轮均通过轴承转动安装于安装盒内,蜗杆的一端穿出安装盒后通过皮带与摆动电机的输出端连接,蜗轮的中部固定连接有第二转轴,第二转轴的两端穿出安装盒后与摆动架固定连接。
9、作为优选,第一气缸的外侧固定连接有第一导套,安装盒的外侧固定连接有第一导向杆,第一导向杆与第一导套滑动连接。
10、作为优选,第二伸缩部包括第二气缸和安装架,第二气缸的伸缩端连接有第二固定块,且其另一端连接有第三固定块,第二固定块固定于安装架上,第三固定块固定于摆动架上。
11、作为优选,安装架的外侧固定连接有第二导向杆,第二气缸的外侧固定连接有第二导套,第二导向杆与第二导套滑动连接。
12、作为优选,切割部包括切割电机以及与切割电机的输出轴固定连接的切割盘,切割电机固定于安装架上。
13、作为优选,切割盘的外围分布有若干个防溅射架,防溅射架的一端与安装架固定连接。
14、本发明的有益效果在于:
15、该多轴树障清理机器人通过第一伸缩部和第二伸缩部调整切割距离,增大切割修剪范围,并能通过将开合机构、旋转部、第一伸缩部、摆动部、第二伸缩部以及切割部的依次连接,实现多轴联动,可控性高,适用于复杂的树障环境,对树障清除彻底,旋转部与第一伸缩部之间方便进行连接固定或拆卸分离,使切割机构的安装或拆卸更便捷,进而方便对切割机构进行维修、更换或者拆卸后单独存放,减小占地面积,更加灵活便携。
技术特征:
1.一种多轴树障清理机器人,包括卷扬机构(1)、两个切割机构(2)、若干个走线机构(3)以及控制两个所述切割机构(2)进行相对开合摆动的开合机构(4),其特征在于:所述卷扬机构(1)和走线机构(3)均设置于开合机构(4)的后侧,若干个所述走线机构(3)分布在所述卷扬机构(1)的两侧,所述切割机构(2)包括依次连接的旋转部(21)、第一伸缩部(22)、摆动部(23)、第二伸缩部(24)以及切割部(25),所述旋转部(21)与开合机构(4)连接。
2.根据权利要求1所述的多轴树障清理机器人,其特征在于:所述旋转部(21)包括轴套(2101)、筒体(2102)、旋转电机(2103)、连接管(2104)、径向轴承(2105)、轴向轴承(2106)以及压盖(2107);
3.根据权利要求2所述的多轴树障清理机器人,其特征在于:所述连接管(2104)与第一伸缩部(22)之间连接有快拆组件(26),所述快拆组件(26)包括安装板(2601)、插接块(2602)、线圈(2603)、弹簧(2604)、静铁芯(2605)以及动铁块(2606),所述安装板(2601)的一侧与第一伸缩部(22)固定连接,另一侧与插接块(2602)固定连接,所述插接块(2602)包括内管(26021)和外管(26022),所述内管(26021)与外管(26022)之间设有插接槽(2607),所述连接管(2104)的另一端滑动嵌接于插接槽(2607)内,所述静铁芯(2605)设置于内管(26021)内,所述线圈(2603)设置于静铁芯(2605)的外侧,所述弹簧(2604)的两端分别与静铁芯(2605)以及动铁块(2606)连接,所述连接管(2104)的内侧设有第二销槽(2608),所述内管(26021)上设有通槽(2609),所述动铁块(2606)滑动连接于通槽(2609)内,且其远离静铁芯(2605)的一端活动嵌接于第二销槽(2608)内。
4.根据权利要求1所述的多轴树障清理机器人,其特征在于:所述开合机构(4)包括壳体(41)、轨道齿板(42)、主动齿轮(43)、从动齿轮(44)和开合电机(45),所述轨道齿板(42)有两个,两个所述轨道齿板(42)分别通过第一转轴(46)设置在所述壳体(41)内,所述第一转轴(46)的两端分别与所述壳体(41)转动连接,所述主动齿轮(43)与从动齿轮(44)啮合连接,所述主动齿轮(43)与一个所述轨道齿板(42)啮合连接,所述从动齿轮(44)与另一个所述轨道齿板(42)啮合连接,所述开合电机(45)的输出轴与所述主动齿轮(43)固定连接,两个所述切割机构(2)分别与两根所述第一转轴(46)连接。
5.根据权利要求1所述的多轴树障清理机器人,其特征在于:所述第一伸缩部(22)包括第一气缸(2201)和安装盒(2202),所述第一气缸(2201)的伸缩端连接有第一固定块(2203),且其另一端与旋转部(21)连接,所述第一固定块(2203)固定于安装盒(2202)内,所述摆动部(23)包括摆动架(2301)、摆动电机(2302)、蜗杆(2303)以及与蜗杆(2303)啮合连接的蜗轮(2304),所述摆动电机(2302)固定于安装盒(2202)的外侧,所述蜗杆(2303)和蜗轮(2304)均通过轴承转动安装于安装盒(2202)内,所述蜗杆(2303)的一端穿出安装盒(2202)后通过皮带(2305)与摆动电机(2302)的输出端连接,所述蜗轮(2304)的中部固定连接有第二转轴(2306),所述第二转轴(2306)的两端穿出安装盒(2202)后与摆动架(2301)固定连接。
6.根据权利要求5所述的多轴树障清理机器人,其特征在于:所述第一气缸(2201)的外侧固定连接有第一导套(2204),所述安装盒(2202)的外侧固定连接有第一导向杆(2205),所述第一导向杆(2205)与第一导套(2204)滑动连接。
7.根据权利要求5所述的多轴树障清理机器人,其特征在于:所述第二伸缩部(24)包括第二气缸(2401)和安装架(2402),所述第二气缸(2401)的伸缩端连接有第二固定块(2403),且其另一端连接有第三固定块(2404),所述第二固定块(2403)固定于安装架(2402)上,所述第三固定块(2404)固定于摆动架(2301)上。
8.根据权利要求7所述的多轴树障清理机器人,其特征在于:所述安装架(2402)的外侧固定连接有第二导向杆(2405),所述第二气缸(2401)的外侧固定连接有第二导套(2406),所述第二导向杆(2405)与第二导套(2406)滑动连接。
9.根据权利要求7所述的多轴树障清理机器人,其特征在于:所述切割部(25)包括切割电机(2501)以及与切割电机(2501)的输出轴固定连接的切割盘(2502),所述切割电机(2501)固定于安装架(2402)上。
10.根据权利要求9所述的多轴树障清理机器人,其特征在于:所述切割盘(2502)的外围分布有若干个防溅射架(2503),所述防溅射架(2503)的一端与安装架(2402)固定连接。
技术总结
本发明涉及电力系统维护领域,尤其涉及一种多轴树障清理机器人,包括卷扬机构、两个切割机构、若干个走线机构以及控制两个切割机构进行开合摆动的开合机构,切割机构包括依次连接的旋转部、第一伸缩部、摆动部、第二伸缩部以及切割部,旋转部与开合机构连接。通过第一伸缩部和第二伸缩部调整切割距离,增大切割修剪范围,并能通过将开合机构、旋转部、第一伸缩部、摆动部、第二伸缩部以及切割部的依次连接,实现多轴联动,可控性高,适用于复杂的树障环境,对树障清除彻底,旋转部与第一伸缩部之间方便进行连接固定或拆卸分离,使切割机构的安装或拆卸更便捷,进而方便对切割机构进行维修、更换或者拆卸后单独存放,减小占地面积,更加灵活便携。
技术研发人员:魏远航
受保护的技术使用者:广东冠能电力科技发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!