一种液体地膜喷洒机器人
本发明涉及农业机械,具体涉及一种液体地膜喷洒机器人。
背景技术:
1、地膜是农业生产中重要的生产资料,可以保水保温,在冷凉地区促进农作物生长。地膜主原料是聚乙烯,不易降解,加之我国的地膜一般比较薄,用后容易碎片化,回收难度巨大,造成了“白色污染”,既影响了土壤结构、水肥的运移均匀性,又造成了微塑料、塑化剂等污染,覆膜播种作物收获后农田残留的废膜成为土地污染的重要源头。
2、目前,为解决白色覆膜的污染问题,腐殖酸液体地膜逐步开始兴起,腐殖酸液体地膜喷洒即可成膜,既具有塑料地膜的吸热增温、保墒、保苗作用,又有强效的粘附功能,可将土粒联结成理想的团聚体,提高土壤微粒的毛管作用,改善土壤的通透性,成为土壤改良剂,还有肥效和药效。其在改善作物生长环境的同时,既提高了土壤的有机质,又保护了土地,作物生长后期可以自行降解,作为肥料供作物后期利用,避免地膜污染,增加土壤肥力,但液体地膜的喷洒需要大量的人工,增加了农业成本。
技术实现思路
1、针对上述问题,本发明的目的是提供一种液体地膜喷洒机器人,可代替人工进行液体地膜的喷洒,喷洒效率高,操作方便,节省成本。
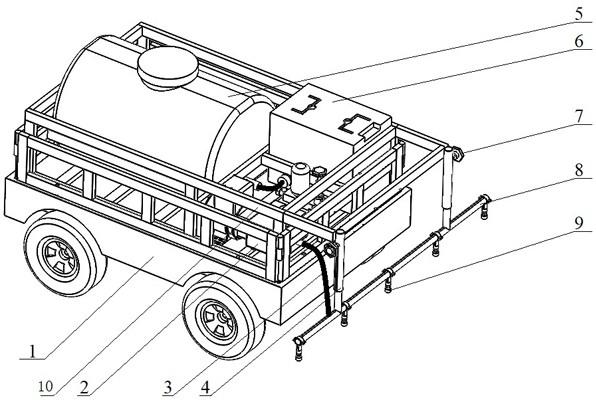
2、本发明的一种液体地膜喷洒机器人,包括车体、主控模块、电机驱动模块和遥控器,所述车体的上部活动设置有喷液框体,底部设置有轮胎;
3、所述喷液框体的后端安装有水泵,水泵的出液口通过软管连接设置在车体后端的喷液管,喷液管上设有若干喷头,所述喷液管与所述喷液框体的后端活动连接,车架的前端设置有液体箱,后端设置有电瓶,所述电瓶与水泵电连接;
4、所述轮胎包括设置在车体底部的两个前部轮胎和两个后部轮胎,两个前部轮胎和两个后部轮胎分别轴连接电机,所述两个前部轮胎的电机支架外侧之间固定连接前连接杆,两个后部轮胎的电机支架外侧之间固定连接后连接杆,所述电机支架内侧均连接转向连接杆,转向连接杆连接转向电机,角度传感器和角度传感器探测板设置在车体底部;
5、所述主控模块与所述水泵、角度传感器和角度传感器探测板信号连接,所述电机驱动模块、遥控器与主控模块信号控制连接。
6、优选的,所述喷头出液口向下设置。
7、优选的,喷液管与所述喷液框体的后端通过梅花手柄螺纹连接,方便固定调整。
8、优选的,所述主控模块包括动力信号输出接口、电源模块、障碍物检测模块、单片机模块、转向模块、无线通信模块、编程端口、水泵控制模块;
9、所述电源模块包括电源处理芯片ic10,所述电源处理芯片ic10为芯片mc34063,其引脚1、引脚7和引脚8均通过过载保护取样电阻r64连接滤波电容c21的正极,滤波电容c21的正极和电源处理芯片ic10的引脚6连接二极管d17的负极,滤波电容c20的正极连接二极管d17的正极,滤波电容c20、滤波电容c21的负极均接地,二极管d17的正极通过限流电阻r63连接开关s1,所述电源处理芯片ic10的引脚连接滤波电感l3的输入端,引脚5连接在分压取样电阻r65和r66之间,分压取样电阻r65的另一端连接滤波电感l3的另一端,分压取样电阻r66的另一端接地,滤波电感l3的输出端连接高精度稳压芯片ic11的输入端,高精度稳压芯片ic11的输入端和接地端之间并接电容c23和电容c24,输出端输出5v电源,高精度稳压芯片ic11的输出端和接地端之间并接电容c25,电源处理芯片ic10的引脚3和引脚4之间连接电容c22;
10、所述单片机模块包括芯片ic9,所述芯片ic9为芯片iap15w4k61s4;
11、所述动力信号输出接口包括蓄电池供电输出端口j1、左侧车速控制输出端口j2、右侧车速控制输出端口j3和水泵控制端口j4,所述蓄电池供电输出端口j1的正极引脚连接开关s1,开关s1连接蓄电池的正极,蓄电池供电输出端口j1的负极引脚接地;
12、所述左侧车速控制输出端口j2的电源引脚连接5v电源,引脚pwm连接所述芯片ic9的引脚p22,引脚oe连接芯片ic9的引脚p24;
13、所述右侧车速控制输出端口j3的电源引脚连接5v电源,引脚pwm连接所述芯片ic9的引脚p23,引脚oe连接芯片ic9的引脚p25;
14、所述水泵控制端口j4的正极引脚连接继电器jx1的常开端,负极引脚接地;
15、所述障碍物检测模块包括超声波测距模块m1,所述超声波测距模块m1的引脚1连接5v电源,引脚2连接所述芯片ic9的引脚p00/rxd3,引脚3连接芯片ic9的引脚p01/txd3,引脚4接地,引脚4与电源之间并接电容c19;
16、所述转向模块包括转向电机驱动模块m2、转向电机e5和角度传感器r59,所述转向电机驱动模块m2的引脚2、引脚3、引脚4分别连接所述芯片ic9的引脚p21、引脚p06、引脚p07,引脚5、引脚7接地,引脚6为模块m2的24v供电引脚,引脚8、引脚9分别连接转向电机e5的正极和负极;角度传感器r59的信号输出端通过限流电阻r60连接至运算放大器ic12a的同相输入端,运算放大器ic12a的输出端依次连接电阻r62、r61接地,r62与r61分压后连接到运算放大器的反相输入端,所述运算放大器ic12a为芯片lm358;
17、所述无线通信模块包括无线通讯模块m3,所述无线通讯模块m3的引脚1接地,引脚2连接5v电源,引脚4连接所述芯片ic9的引脚p37,引脚5连接芯片ic9的引脚p36,引脚1和引脚2之间并接电容c26;
18、所述编程模块包括编程端口j4,所述编程端口j4的引脚1连接5v电源,引脚2和引脚3分别连接芯片ic9的引脚p31、p30,引脚4接地;
19、所述水泵控制模块包括继电器jx1、场效应管q9,所述继电器jx1线圈的一端通过电源开关s1后连接至24v电源,另一端连接场效应管q9的漏极,场效应管q9的控制栅极连接至芯片ic9的引脚p05,源极接地。
20、所述电机驱动模块包括稳压模块、左侧隔离控制模块、右侧隔离控制模块、左侧电机驱动模块和右侧电机驱动模块;
21、所述稳压模块包括电源处理芯片ic1、ic2,电源处理芯片ic1的引脚1连接所述主控模块的dc24v电压正极端、引脚2通过电阻r1连接低频滤波电容c1的正极,低频滤波电容c1的负极接地、引脚8通过电阻r4连接电感l1的输入端,电阻r4和电感l1的连接端与电源处理芯片ic1的引脚6连接,引脚6通过电阻r3连接引脚3,电阻r5一端连接在电感l1的输出端,另一端连接引脚3,电感l1的输出端依次通过二极管d2和电阻r2连接至引脚2,电阻r4与电感l1的连接端连接二极管d1的负极,二极管d1的正极接地,电感l1的输出端连接电阻r6的一端,电阻r6另一端接地,电容c3与电阻r6并接,电容c3正极连接5v电源;
22、电源处理芯片ic2的引脚1连接所述主控模块的dc24v电压正极端、引脚2通过电阻r7连接低频滤波电容c4的正极,低频滤波电容c4的负极接地、引脚8通过电阻r10连接电感l2的输入端,电阻r10和电感l2的连接端与电源处理芯片ic2的引脚6连接,引脚6通过电阻r9连接引脚3,电阻r9的一端连接在电感l2的输出端,另一端连接引脚3,电感l2的输出端依次通过二极管d4和电阻r8连接至引脚2,电阻r10与电感l2的连接端连接二极管d3的负极,二极管d3的正极接地,电感l2的输出端连接电阻r12的一端,电阻r12另一端接地,电容c6与电阻r12并接,电容c6正极连接12v电源。
23、所述左侧隔离控制模块包括光耦ic9、ic10,施密特触发器ic3a、ic3c,所述光耦ic9输入正极端连接所述主控模块5v电源,输入负极端通过电阻r13连接所述左侧车速控制输出端口j2的pwm输入端,光耦ic9的输出端连接施密特触发器ic3a的输入端;所述光耦ic10输入正极端连接所述主控模块的5v电源,输入负极端通过电阻r14连接所述左侧车速控制输出端口j2的oe输入端,光耦ic10的输出端连接施密特触发器ic3c的输入端。
24、所述右侧隔离控制模块包括光耦ic11、ic12,施密特触发器ic3d、ic3f,所述光耦ic11输入正极端连接所述主控模块5v电源,输入负极端通过电阻r29连接所述右侧车速控制输出端口j3的pwm输入端,光耦ic11的输出端连接施密特触发器ic3d的输入端;所述光耦ic12输入正极端连接所述主控模块的5v电源,输入负极端通过电阻r30连接所述右侧车速控制输出端口j3的oe输入端,光耦ic12的输出端连接施密特触发器ic3f的输入端。
25、所述左侧电机驱动模块包括半桥场效应管驱动专用芯片ic5、ic6,所述半桥场效应管驱动专用芯片ic5、ic6为芯片eg3116d,半桥场效应管驱动专用芯片ic5的引脚1连接电源,引脚2分两路一路通过电阻r17连接在施密特触发器ic3a的输出端,另一路连接在与门电路ic4b的输入端,引脚3通过电阻r18连接与门电路ic4a输出引脚,所述施密特触发器ic3c的输出端连接与门电路ic4a的输入端,半桥场效应管驱动专用芯片ic5的引脚4接地,引脚1和引脚8之间连接升压二极管d5,引脚7连接二极管d9的负极,二极管d9并接限流电阻r21,二极管d9的正极通过电阻r25连接场效应管q1的源极,电阻r21的输出端连接场效应管q1的控制栅极,场效应管q1的漏极连接24v电源,半桥场效应管驱动专用芯片ic5引脚5通过电阻r22连接至场效应管q2的控制栅极,电阻r22并接二极管d10,二极管d10通过电阻r26连接至场效应管q2的源极,场效应管q2的漏极连接场效应管q1的源极,场效应管q2的漏极和场效应管q1的源极连接端连接电机e1、e2的正极端;
26、所述半桥场效应管驱动专用芯片ic6的引脚1连接电源,引脚2分两路一路通过电阻r19连接在施密特触发器ic3b的输出端,另一路连接在与门电路ic4a的输入端,施密特触发器ic3b的输入端连接施密特触发器ic3a的输出端,半桥场效应管驱动专用芯片ic6引脚3通过电阻r20连接与门电路ic4b输出引脚,所述施密特触发器ic3c的输出端连接与门电路ic4b的输入端,半桥场效应管驱动专用芯片ic6的引脚4接地,引脚1和引脚8之间连接升压二极管d6,引脚7连接二极管d11的负极,二极管d11并接限流电阻r23,二极管d11的正极通过电阻r27连接场效应管q3的源极,电阻r23的输出端连接场效应管q3的控制栅极,所述场效应管q3的漏极连接24v电源,半桥场效应管驱动专用芯片ic6引脚5通过电阻r24连接至场效应管q4的控制栅极,电阻r24并接二极管d12,二极管d12通过电阻r28连接至场效应管q4的源极,场效应管q4的漏极连接场效应管q3的源极;场效应管q4的漏极和场效应管q3的源极连接端连接电机e1、e2的负极端。
27、所述右侧电机驱动模块包括半桥场效应管驱动专用芯片ic7、ic8,所述半桥场效应管驱动专用芯片ic7、ic8为芯片eg3116d,半桥场效应管驱动专用芯片ic7的引脚1连接电源,引脚2分两路一路通过电阻r33连接在施密特触发器ic3d的输出端,另一路连接在与门电路ic4d的输入端,引脚3通过电阻r34连接与门电路ic4c输出引脚,所述施密特触发器ic3f的输出端连接与门电路ic4c的输入端,半桥场效应管驱动专用芯片ic7的引脚4接地,引脚1和引脚8之间连接升压二极管d7,引脚7连接二极管d13的负极,二极管d13并接限流电阻r37,二极管d13的正极通过电阻r14连接场效应管q5的源极,电阻r37的输出端连接场效应管q5的控制栅极,场效应管q5的漏极连接24v电源;半桥场效应管驱动专用芯片ic7引脚5通过电阻r38连接至场效应管q6的控制栅极,电阻r38并接二极管d14,二极管d14通过电阻r42连接至场效应管q6的源极,场效应管q6的漏极连接24v电源,场效应管q6的漏极连接场效应管q5的源极,场效应管q6的漏极和场效应管q5的源极连接端连接电机e3、e4的正极端;
28、所述半桥场效应管驱动专用芯片ic8的引脚1连接电源,引脚2分两路一路通过电阻r35连接在施密特触发器ic3e的输出端,另一路连接在与门电路ic4c的输入端,施密特触发器ic3e的输入端连接施密特触发器ic3d的输出端,半桥场效应管驱动专用芯片ic8引脚3通过电阻r36连接与门电路ic4d输出引脚,所述施密特触发器ic3f的输出端连接与门电路ic4d的输入端,半桥场效应管驱动专用芯片ic8的引脚4接地,引脚1和引脚8之间连接升压二极管d8,引脚7连接二极管d15的负极,二极管d15并接限流电阻r39,二极管d15的正极通过电阻r43连接场效应管q7的源极,电阻r39的输出端连接场效应管q7的控制栅极,半桥场效应管驱动专用芯片ic8引脚5通过电阻r40连接至场效应管q8的控制栅极,电阻r40并接二极管d16,二极管d16通过电阻r44连接至场效应管q8的源极,场效应管q8的漏极连接场效应管q7的源极;场效应管q8的漏极和场效应管q7的源极连接端连接电机e3、e4的负极端。
29、所述遥控器包括壳体,壳体的上端设有显示屏,所述显示屏上设有显示速度数码管和显示机器人电量数码管,所述显示屏下端设有若干按键。优选的,所述遥控器内部设有遥控模块,所述遥控模块包括单片机、电源处理模块、无线通信模块、按键模块、存储模块、显示模块;
30、所述单片机为芯片ic13,芯片ic13为芯片iap15w413as;
31、所述电源处理模块包括电源处理芯片ic12、蓄电池bt2和开关s1,所述电源处理芯片ic12的引脚1、引脚7和引脚8均通过过载保护取样电阻r72连接滤波电容c28的正极,滤波电容c28的正极和电源处理芯片ic12的引脚6连接限流电阻r71的一端,限流电阻r71的另一端通过开关s1连接蓄电池bt2的正极,电阻r69和电阻r70串接后与滤波电容c28并接,连接在开关s1和电阻r71之间,蓄电池bt2的负极连接电容c27的一端,电容c27的另一点连接至芯片ic13的引脚19,电源处理芯片ic12的引脚2连接电感l4的一端,引脚5连接在分压取样电阻r73和r74之间,分压取样电阻r73的另一端连接滤波电感l4的另一端,分压取样电阻r74的另一端接地,电容c31的正极连接3.3v电源,负极接地;电容c30与电容c31并接,电源处理芯片ic12的引脚3、引脚4连接在电容c28的负极。
32、所述无线通信模块包括通讯模块m4,所述通讯模块m4的引脚1、引脚3接地,引脚2连接3.3v电源,引脚4、引脚5分别连接芯片ic13的引脚p31和引脚p30,引脚7连接芯片ic13的引脚p11。
33、所述按键模块包括按键k1-k8,所述按键k1-k8的一端分别通过上拉电阻r77、r80、r76、r79、r75、r78、r82、r81连接芯片ic13的引脚p14、引脚p17、引脚p13、引脚p16、引脚p12、引脚p15、引脚p32、引脚37,另一端接地。
34、所述存储模块包括数据存储芯片ic14,所述数据存储芯片ic14的引脚1、引脚2、引脚3、引脚4、引脚7均接地,引脚5、引脚6分别连接芯片ic13的引脚p54、引脚p55,引脚8连接3.3v电源。
35、所述显示模块包括液晶屏lcd1和液晶屏驱动芯片ic15,所述液晶屏驱动芯片ic15的引脚como0- como3与液晶屏lcd1的引脚cm1-cm4连接,引脚seg0-seg15与液晶屏的引脚1a、引脚1b、引脚2a、引脚2b、引脚3a、引脚3b、引脚4a、引脚4b、引脚5a、引脚5b、引脚6a、引脚6b、引脚7a、引脚7b、引脚8a、引脚8b连接;引脚vss接地,引脚vdd连接3.3v电源,引脚data、引脚/wr、引脚/rd、引脚/cs分别连接芯片ic13的引脚p33、引脚p34、引脚p35、引脚p36。
36、优选的,所述主控模块中电源模块的滤波电感l4的输入端连接续流二极管d19的负极,续流二极管d19的正极接地,续流二极管d19用来保障在滤波电感l4流过比较稳定的电流。
37、优选的,所述按键k1为前进按键,k5为加速前进按键,k3为左转按键,k2为后退按键,k7为暂停行驶按键,k6为减速,k4为右转按键,k8为水泵开关按键。
38、本发明的液体地膜喷洒机器人,首先在液体箱中装满液体地膜,然后通过遥控器来控制车体行进,按下“前进”按健,机器人向前行走,需要加速前进时可以按“加速前进”按健,需要暂停行驶、左转、右转、后退、加速后退时按相应的按健,需要喷液时,按下“水泵开关”按键,结束喷液后,再次按下“水泵开关”按键,遥控器上的显示速度数码管会实时显示机器人行驶速度,显示机器人电量数码管会实时显示机器人的所剩电量。
39、本发明的液体地膜喷洒机器人,通过人工控制遥控器从而控制液体地膜的喷洒,喷洒速度快,节省了人工成本,同时方便操作,实现了液体地膜喷洒的自动化。
- 还没有人留言评论。精彩留言会获得点赞!