一种喷洒设备及方法与流程
本技术涉及农林业设备控制,具体涉及一种喷洒设备及方法。
背景技术:
1、在农林业技术领域,农药的喷洒主要通过机械大面积无差别的统一进行喷洒,为了实现精准喷洒,现有技术中利用无人机进行喷洒,但是无人机飞行高度较高,受到环境影响较大;而且喷洒方式成本较高、非常浪费资源;另外,喷洒时大量的农药弥漫在空气中也会造成环境污染。
技术实现思路
1、本技术提供了一种喷洒设备及方法,能够在保证精准喷洒的同时,避免了成本高、资源浪费以及环境污染的问题。
2、第一方面,本技术实施例提供了一种喷洒设备,所述设备包括:
3、处理器,根据获取到的当前时间喷洒设备的行驶信息,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离;
4、根据通过测距器预先测量的各个喷头与几何中心相对距离与当前时间几何中心的坐标,确定当前时间各个喷头各自的坐标,所述当前时间几何中心的坐标是基于每个坐标方向对应的行驶距离确定的;
5、根据所述当前时间各个喷头各自的坐标,以及根据第一传感器获取的待喷洒目标的位置信息,确定当前时间所述各个喷头中存在满足喷洒条件的目标喷头时,向所述目标喷头下发对所述待喷洒目标进行喷洒的指令;
6、第一传感器,用于获取待喷洒目标的位置信息;
7、测距器,用于测量各喷头与喷洒设备几何中心的相对距离。
8、在一种可能的实施方式中,所述设备还包括第二传感器或实时动态全球定位系统,其中,所述第一传感器用于采集喷洒设备的像素速度,实时动态全球定位系统用于采集所述喷洒设备几何中心的坐标;所述处理器还用于,根据获取到的当前时间喷洒设备的行驶信息,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离,包括:
9、根据通过所述第二传感器采集的像素速度,确定当前时间喷洒设备不同坐标方向的实际行驶速度,根据各坐标方向的实际行驶速度,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离;或
10、根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离。
11、在一种可能的实施方式中,所述设备还包括第三传感器,用于采集喷洒设备的不同坐标方向对应的姿态角速度和不同坐标方向对应的角度;
12、所述处理器还用于,根据通过所述第二传感器采集的像素速度,确定当前时间喷洒设备不同坐标方向的实际行驶速度,包括:
13、将所述像素速度转换为不同坐标方向的第一线速度;
14、将根据第三传感器采集的姿态角速度转换为不同坐标方向的第二线速度;
15、针对每个坐标方向,将所述方向的第一线速度与所述方向的第二线速度的差值作为当前时间所述坐标方向的实际行驶速度。
16、在一种可能的实施方式中,所述处理器还用于,根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离,包括:
17、根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的待修正行驶距离;
18、根据各坐标方向对应的待修正行驶距离,确定各坐标方向对应的待修正行驶速度;
19、将根据第三传感器采集的姿态角速度转换为不同坐标方向的第二线速度;
20、针对每个坐标方向,将所述方向的待修正速度与所述方向的第二线速度的差值,作为当前时间所述坐标方向的实际行驶速度,并利用所述实际行驶速度确定喷洒设备当前时间所述坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离。
21、在一种可能的实施方式中,所述处理器还用于,根据通过测距器预先测量的各个喷头与几何中心相对距离与当前时间几何中心的坐标,确定当前时间各个喷头各自的坐标,包括:
22、针对每个喷头对应的每个坐标方向,将所述坐标方向上,所述几何中心的坐标值与根据测距器预先测量的所述喷头到所述几何中心距离的差值,作为当前时间所述喷头在所述坐标方向的坐标值。
23、在一种可能的实施方式中,所述处理器还用于,确定当前时间所述各个喷头中存在满足喷洒条件的目标喷头,包括:
24、在各个喷头中,将当前时间与所述待喷洒目标之间的距离小于预设距离的喷头作为满足喷洒条件目标喷头。
25、在一种可能的实施方式中,所述处理器还用于,向所述目标喷头下发对所述待喷洒目标进行喷洒的指令,还包括:
26、根据当前时间目标喷头的坐标、当前时间的各坐标方向的第二线速度、下发所述喷洒指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值δt、以及根据所述第三传感器采集的不同坐标方向对应的角度,预测所述δt后所述目标喷头的坐标;
27、根据所述目标喷头的坐标,确定所述δt后所述目标喷头满足喷洒条件,则向所述目标喷头下发对所述待喷洒目标进行喷洒的指令。
28、在一种可能的实施方式中,所述处理器还用于,根据当前时间目标喷头的坐标、当前时间的各坐标方向的第二线速度、下发所述喷洒指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值δt、以及根据所述第三传感器采集的不同坐标方向对应的角度,预测所述δt后所述目标喷头的坐标,包括:
29、针对当前时间目标喷头每个坐标方向的坐标值,采取如下操作:
30、xswn'=xswn+δt×v+h×tan(r),其中,xswn’为δt后目标喷头在所述坐标方向的坐标值,xswn为当前时间目标喷头在所述坐标方向的坐标值,δt为下发所述指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值,v为当前时间所述坐标方向的第二线速度,h为几何中心到地面的距离,r为所述坐标方向对应的角度。
31、第二方面,本技术实施例提供了一种喷洒方法,所述方法包括:
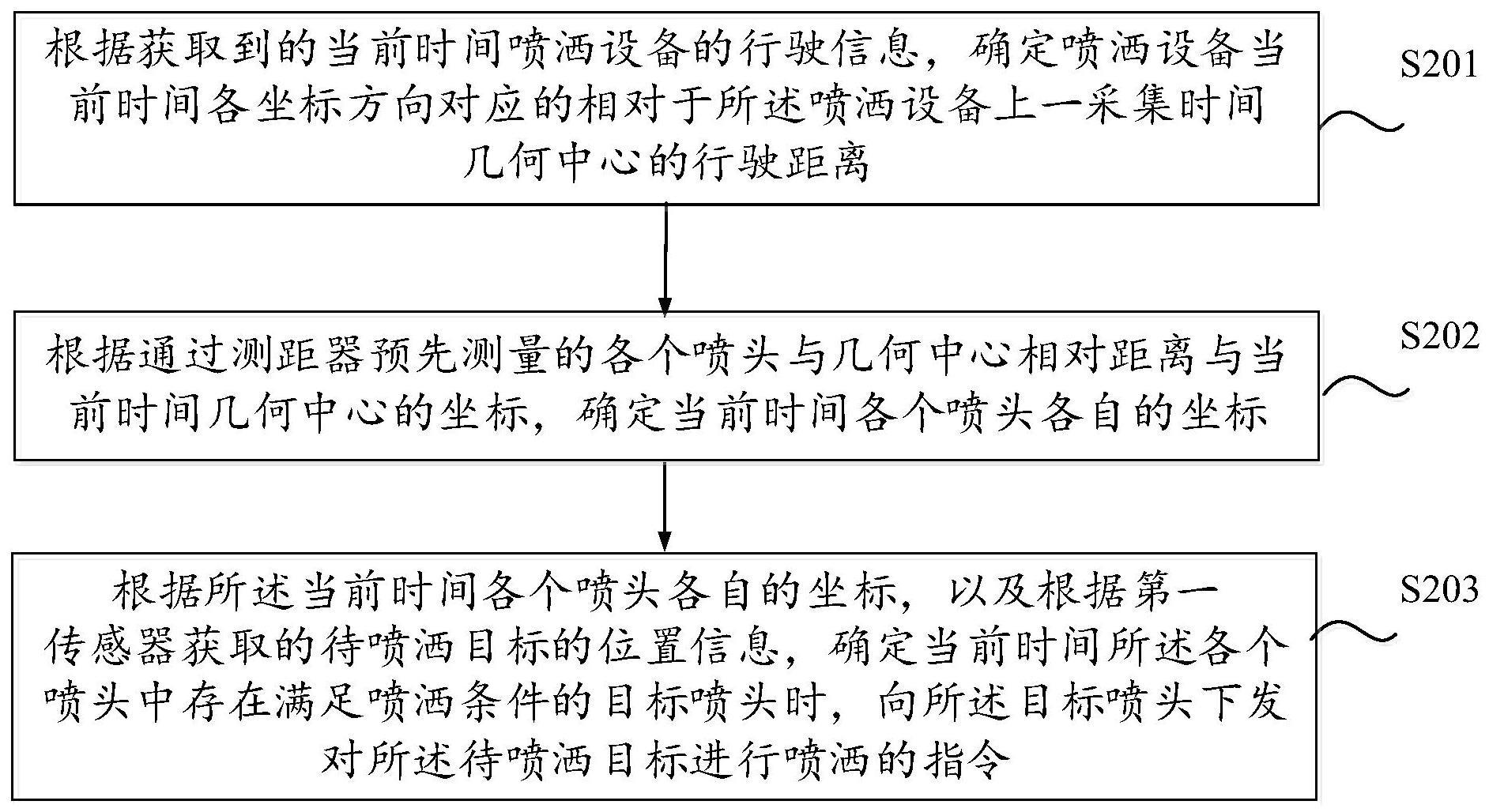
32、根据获取到的当前时间喷洒设备的行驶信息,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离;
33、根据通过测距器预先测量的各个喷头与几何中心相对距离与当前时间几何中心的坐标,确定当前时间各个喷头各自的坐标,所述当前时间几何中心的坐标是基于每个坐标方向对应的行驶距离确定的;
34、根据所述当前时间各个喷头各自的坐标,以及根据第一传感器获取的待喷洒目标的位置信息,确定当前时间所述各个喷头中存在满足喷洒条件的目标喷头时,向所述目标喷头下发对所述待喷洒目标进行喷洒的指令。
35、在一种可能的实施方式中,所述根据获取到的当前时间喷洒设备的行驶信息,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离,包括:
36、根据通过第二传感器采集的像素速度,确定当前时间喷洒设备不同坐标方向的实际行驶速度,根据各坐标方向的实际行驶速度,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离;或
37、根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离。
38、在一种可能的实施方式中,所述根据通过第二传感器采集的像素速度,确定当前时间喷洒设备不同坐标方向的实际行驶速度,包括:
39、将所述像素速度转换为不同坐标方向的第一线速度;
40、将根据第三传感器采集的姿态角速度转换为不同坐标方向的第二线速度;
41、针对每个坐标方向,将所述方向的第一线速度与所述方向的第二线速度的差值作为当前时间所述坐标方向的实际行驶速度。
42、在一种可能的实施方式中,所述根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离,包括:
43、根据通过实时动态全球定位系统采集的所述几何中心的坐标,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的待修正行驶距离;
44、根据各坐标方向对应的待修正行驶距离,确定各坐标方向对应的待修正行驶速度;
45、将根据第三传感器采集的姿态角速度转换为不同坐标方向的第二线速度;
46、针对每个坐标方向,将所述方向的待修正速度与所述方向的第二线速度的差值,作为当前时间所述坐标方向的实际行驶速度,并利用所述实际行驶速度确定喷洒设备当前时间所述坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离。
47、在一种可能的实施方式中,所述根据通过测距器预先测量的各个喷头与几何中心相对距离与当前时间几何中心的坐标,确定当前时间各个喷头各自的坐标,包括:
48、针对每个喷头对应的每个坐标方向,将所述坐标方向上,所述几何中心的坐标值与根据测距器预先测量的所述喷头到所述几何中心距离的差值,作为当前时间所述喷头在所述坐标方向的坐标值。
49、在一种可能的实施方式中,所述确定当前时间所述各个喷头中存在满足喷洒条件的目标喷头,包括:
50、在各个喷头中,将当前时间与所述待喷洒目标之间的距离小于预设距离的喷头作为满足喷洒条件目标喷头。
51、在一种可能的实施方式中,向所述目标喷头下发对所述待喷洒目标进行喷洒的指令,还包括:
52、根据当前时间目标喷头的坐标、当前时间的各坐标方向的第二线速度、下发所述喷洒指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值δt、以及根据所述第三传感器采集的不同坐标方向对应的角度,预测所述δt后所述目标喷头的坐标;
53、根据所述目标喷头的坐标,确定所述δt后所述目标喷头满足喷洒条件,则向所述目标喷头下发对所述待喷洒目标进行喷洒的指令。
54、在一种可能的实施方式中,所述根据当前时间目标喷头的坐标、当前时间的各坐标方向的第二线速度、下发所述喷洒指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值δt、以及根据所述第三传感器采集的不同坐标方向对应的角度,预测所述δt后所述目标喷头的坐标,包括:
55、针对当前时间目标喷头每个坐标方向的坐标值,采取如下操作:
56、xswn'=xswn+δt×v+h×tan(r),其中,xswn’为δt后目标喷头在所述坐标方向的坐标值,xswn为当前时间目标喷头在所述坐标方向的坐标值,δt为下发所述指令的时间与所述目标喷头对所述待喷洒目标实际进行喷洒的时间之间的时间差值,v为当前时间所述坐标方向的第二线速度,h为几何中心到地面的距离,r为所述坐标方向对应的角度。
57、第三方面,本技术实施例提供了一种喷洒装置,所述装置包括:
58、确定行驶距离模块,用于根据获取到的当前时间喷洒设备的行驶信息,确定喷洒设备当前时间各坐标方向对应的相对于所述喷洒设备上一采集时间几何中心的行驶距离;
59、确定喷头坐标模块,用于根据通过测距器预先测量的各个喷头与几何中心相对距离与当前时间几何中心的坐标,确定当前时间各个喷头各自的坐标,所述当前时间几何中心的坐标是基于每个坐标方向对应的行驶距离确定的;
60、下发指令模块,用于根据所述当前时间各个喷头各自的坐标,以及根据第一传感器获取的待喷洒目标的位置信息,确定当前时间所述各个喷头中存在满足喷洒条件的目标喷头时,向所述目标喷头下发对所述待喷洒目标进行喷洒的指令。
61、第四方面,本技术实施例提供了一种计算机存储介质,所述计算机存储介质存储有计算机程序,所述计算机程序用于使计算机执行上述第二方面中的方法。
62、本技术实施例提高的喷洒设备通过各传感器与测距器的配合,能够确定待喷洒目标的位置,以及各喷头的坐标,并将当前时间与所述待喷洒目标之间的距离小于预设距离的喷头作为满足喷洒条件目标喷头,进而实现精准喷洒,而且避免了成本高、资源浪费、负载有限、环境污染等问题。
- 还没有人留言评论。精彩留言会获得点赞!