一种农药喷洒方法、装置、设备及介质与流程
本技术涉及农业,具体涉及一种农药喷洒方法、装置、设备及介质。
背景技术:
1、农业作业过程中,为防治病虫对农作物的生长侵害多需对农作物进行农药喷洒。随着科技的提高,针对大面积耕种区的农药喷洒已摒弃了人力作业的农药喷洒方式,继而采用智能化的农药喷洒方式来提高作业效率。
2、目前传统的智能化农药喷洒方式主要采用无人机实现,通过预先从耕种区中测出喷洒区的地理位置,再根据喷洒区的位置来设计无人机的行驶路线以及行驶过程中执行农药喷洒的时间节点。这样,待无人机行驶至对应时间节点后通过执行喷洒操作即可对喷洒区的农作物进行农药喷洒。
3、上述流程首先需进行大量人工参与,例如标记喷洒区的位置、设计无人机的行驶路线等。其次,受外界因素影响无人机的行驶路线可能会出现偏差,存在无人机作业工程中已到达喷洒时间但尚未飞到喷洒区的情况。继而导致无人机可能错误的将农药喷洒到非喷洒区,造成环境的损害。可见,传统的农药喷洒作业存在人力成本较高、喷洒精度较差的问题。
技术实现思路
1、本技术实施例提供一种农药喷洒方法、装置、设备及介质。用于解决农药喷洒作业中人力成本较高且喷洒精度较差的问题。
2、为达到上述目的,本技术实施例的技术方案是这样实现的:
3、第一方面,本技术实施例提供了一种农药喷洒方法,所述方法包括:
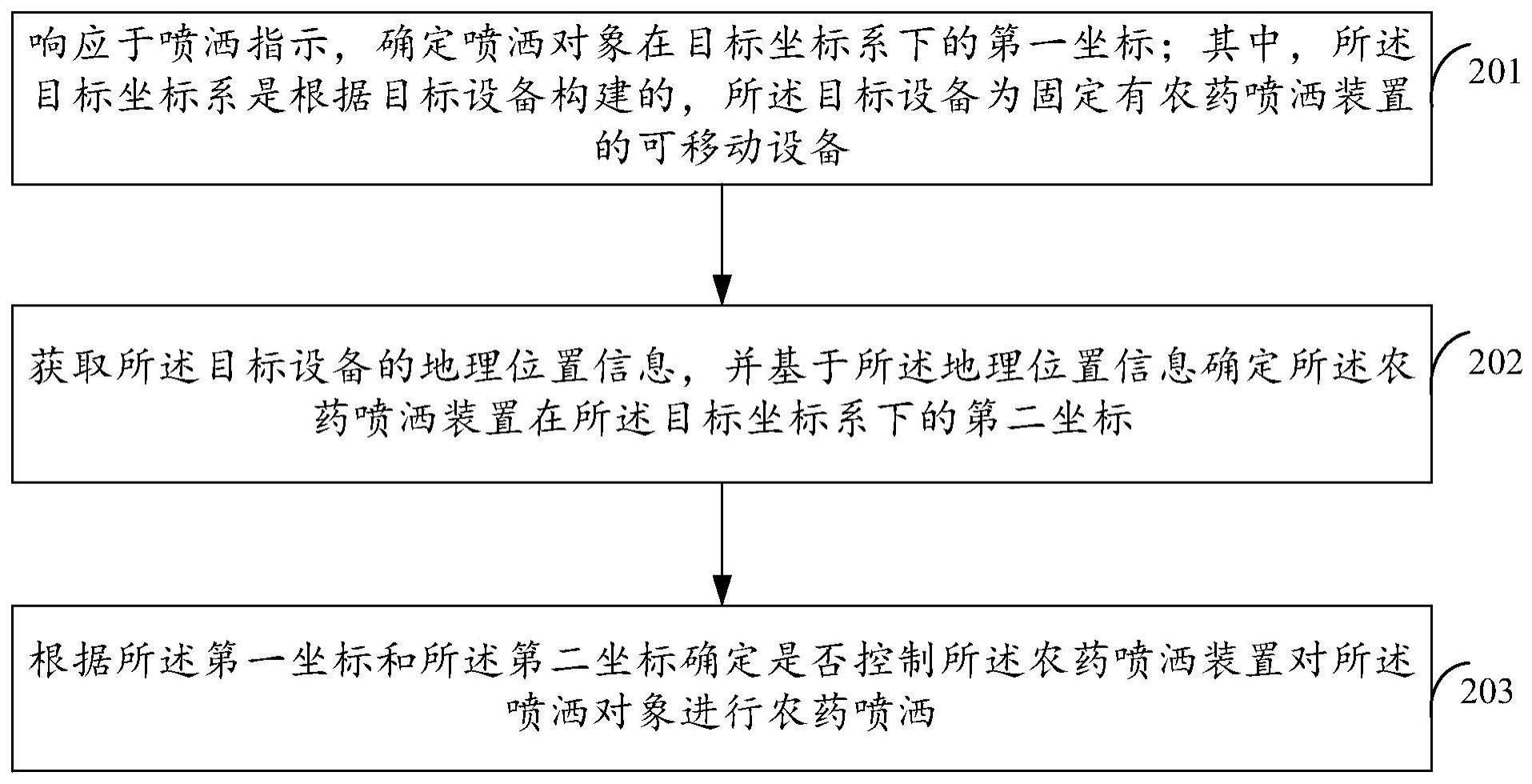
4、响应于喷洒指示,确定喷洒对象在目标坐标系下的第一坐标;其中,所述目标坐标系是根据目标设备构建的,所述目标设备为固定有农药喷头的可移动设备;
5、获取所述目标设备的地理位置信息,并基于所述地理位置信息确定所述农药喷头在所述目标坐标系下的第二坐标;
6、根据所述第一坐标和所述第二坐标确定是否控制所述农药喷头对所述喷洒对象进行农药喷洒。
7、在一些可能的实施例中,所述目标设备携带有图像采集装置,所述确定喷洒对象在目标坐标系下的第一坐标,包括:
8、控制所述图像采集装置对所述喷洒对象进行图像采集操作,得到包含所述喷洒对象的目标图像;
9、通过对所述目标图像中喷洒对象的像素坐标系坐标进行坐标系转换,得到所述第一坐标。
10、在一些可能的实施例中,所述基于所述地理位置信息确定所述农药喷头在所述目标坐标系下的第二坐标,包括:
11、根据所述地理位置信息确定所述目标设备在地心地固坐标系的第三坐标;
12、通过对所述第三坐标进行坐标系转换,得到所述目标设备在所述目标坐标系下的第四坐标;
13、根据所述第四坐标和标定偏移量确定所述第二坐标;其中,所述标定偏移量是根据所述农药喷头与所述目标设备的几何中心间距确定的。
14、在一些可能的实施例中,所述地理位置信息包括所述目标设备的经纬度和所述目标设备的几何中心距地面的高度;所述根据所述地理位置信息确定所述目标设备在地心地固坐标系的第三坐标,包括:
15、根据所述地理位置信息、地球椭球极扁率和地球椭球长半径确定所述第三坐标。
16、在一些可能的实施例中,所述根据所述第一坐标和所述第二坐标确定是否控制所述农药喷头对所述喷洒对象进行农药喷洒,包括:
17、确定所述第一坐标和所述第二坐标间的坐标偏移量;
18、若所述坐标偏移量小于预设阈值,则控制所述农药喷头对所述喷洒对象进行农药喷洒。
19、在一些可能的实施例中,所述目标坐标系为世界坐标系,所述目标坐标系的坐标原点为所述目标设备在指定位置处的几何中心。
20、第二方面,本技术实施例提供了一种农药喷洒装置,所述装置包括:
21、对象位置模块,被配置为执行响应于喷洒指示,确定喷洒对象在目标坐标系下的第一坐标;其中,所述目标坐标系是根据目标设备构建的,所述目标设备为固定有农药喷头的可移动设备;
22、喷头位置模块,被配置为执行获取所述目标设备的地理位置信息,并基于所述地理位置信息确定所述农药喷头在所述目标坐标系下的第二坐标;
23、农药喷洒模块,被配置为执行根据所述第一坐标和所述第二坐标确定是否控制所述农药喷头对所述喷洒对象进行农药喷洒。
24、在一些可能的实施例中,所述目标设备携带有图像采集装置,执行所述确定喷洒对象在目标坐标系下的第一坐标,所述喷洒对象位置被配置为:
25、控制所述图像采集装置对所述喷洒对象进行图像采集操作,得到包含所述喷洒对象的目标图像;
26、通过对所述目标图像中喷洒对象的像素坐标系坐标进行坐标系转换,得到所述第一坐标。
27、在一些可能的实施例中,执行所述基于所述地理位置信息确定所述农药喷头在所述目标坐标系下的第二坐标,所述喷头位置模块被配置为:
28、根据所述地理位置信息确定所述目标设备在地心地固坐标系的第三坐标;
29、通过对所述第三坐标进行坐标系转换,得到所述目标设备在所述目标坐标系下的第四坐标;
30、根据所述第四坐标和标定偏移量确定所述第二坐标;其中,所述标定偏移量是根据所述农药喷头与所述目标设备的几何中心间距确定的。
31、在一些可能的实施例中,所述地理位置信息包括所述目标设备的经纬度和所述目标设备的几何中心距地面的高度;执行所述根据所述地理位置信息确定所述目标设备在地心地固坐标系的第三坐标,所述喷头位置模块被配置为:
32、根据所述地理位置信息、地球椭球极扁率和地球椭球长半径确定所述第三坐标。
33、在一些可能的实施例中,执行所述根据所述第一坐标和所述第二坐标确定是否控制所述农药喷头对所述喷洒对象进行农药喷洒,所述农药喷洒模块被配置为:
34、确定所述第一坐标和所述第二坐标间的坐标偏移量;
35、若所述坐标偏移量小于预设阈值,则控制所述农药喷头对所述喷洒对象进行农药喷洒。
36、在一些可能的实施例中,所述目标坐标系为世界坐标系,所述目标坐标系的坐标原点为所述目标设备在指定位置处的几何中心。
37、第三方面,本技术实施例还提供了一种电子设备,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,当所述计算机程序被所述处理器执行时,使得所述处理器实现第一方面中的任一方法。
38、第四方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现第一方面中的任一方法。
39、第五方面,本技术实施例一种计算机程序产品,其包括计算机指令,所述计算机指令存储在计算机可读存储介质中;当计算机设备的处理器从所述计算机可读存储介质读取所述计算机指令时,所述处理器执行该计算机指令,使得所述计算机设备实现第一方面中的任一方法。
40、本技术实施例,通过在获取喷洒指示后确定喷洒对象在目标坐标系的第一坐标,并根据目标设备的地理位置信息确定农药喷头在目标坐标系的第二坐标。该目标坐标系是根据目标设备构建的,且农药喷头是固定在目标设备上的,因此根据目标设备的地理位置信息能够较为精准的推算农药喷头在目标坐标系的坐标。这样,整个流程无需人工参与,通过比对喷洒对象和农药喷头在相同坐标系下的坐标即可确定是否控制农药喷头对喷洒对象进行农药喷洒,继而提高农药喷洒精度。
41、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本公开而了解。本技术的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!