机器人园艺工具和方法与流程
本文描述的实施例涉及机器人园艺工具,更具体地,涉及操作机器人园艺工具的更高效的方法。
背景技术:
1、当机器人园艺工具遇到某个类型的障碍物时,需要改变其方向以保持在期望的切割区域上。
技术实现思路
1、在一些方面,一种机器人园艺工具,包括:工具本体,该工具本体具有第一端和与第一端相反的第二端,其中,工具本体限定延伸穿过第一端和第二端的纵向轴线;一个或多个轮组件,该一个或多个轮组件联接到工具本体;以及控制器,该控制器与轮组件可操作地通信。控制器被配置为向轮组件输出一个或多个信号以:使工具本体在第一行进方向上运动;在与物体间隔开预定距离的第一位置处停止工具本体的运动;使工具本体在第一位置时旋转;以及在工具本体已经旋转之后,使工具本体在与第一行进方向相反的第二行进方向上远离第一位置运动。
2、替代地或附加地,在任何组合中,其中,控制系统被配置为输出一个或多个信号以使工具本体在第一位置旋转小于90度。
3、替代地或附加地,在任何组合中,其中,控制系统被配置为输出一个或多个信号以使工具本体在第一位置旋转小于30度。
4、替代地或附加地,在任何组合中,其中,控制系统被配置为输出一个或多个信号以使工具本体在第一位置旋转小于10度。
5、替代地或附加地,在任何组合中,其中,工具本体包括周边,并且其中,工具本体被配置为围绕定位在该周边内的工具枢转轴线旋转。
6、替代地或附加地,在任何组合中,其中,当在第一方向上行进时,工具本体以第一端作为前端行进,并且其中,当在第二方向上行进时,工具本体以第二端作为前端行进。
7、替代地或附加地,在任何组合中,其中,控制系统被配置为发送一个或多个信号以使工具本体在第一位置时枢转随机选择的度数。
8、替代地或附加地,在任何组合中,其中,这些随机选择的度数小于30度。
9、替代地或附加地,在任何组合中,该机器人园艺工具进一步包括切割组件,并且其中,该切割组件包括限定防护装置轴线的刀片防护装置、以及能够相对于刀片防护装置围绕防护装置轴线旋转的切割刀片。
10、替代地或附加地,在任何组合中,其中,刀片防护装置包括至少一个对称轴线。
11、替代地或附加地,在任何组合中,其中,该对称轴线垂直于工具本体的纵向轴线。
12、替代地或附加地,在任何组合中,其中,切割组件被配置为在工具本体在第一行进方向和第二行进方向上行进时切割植物。
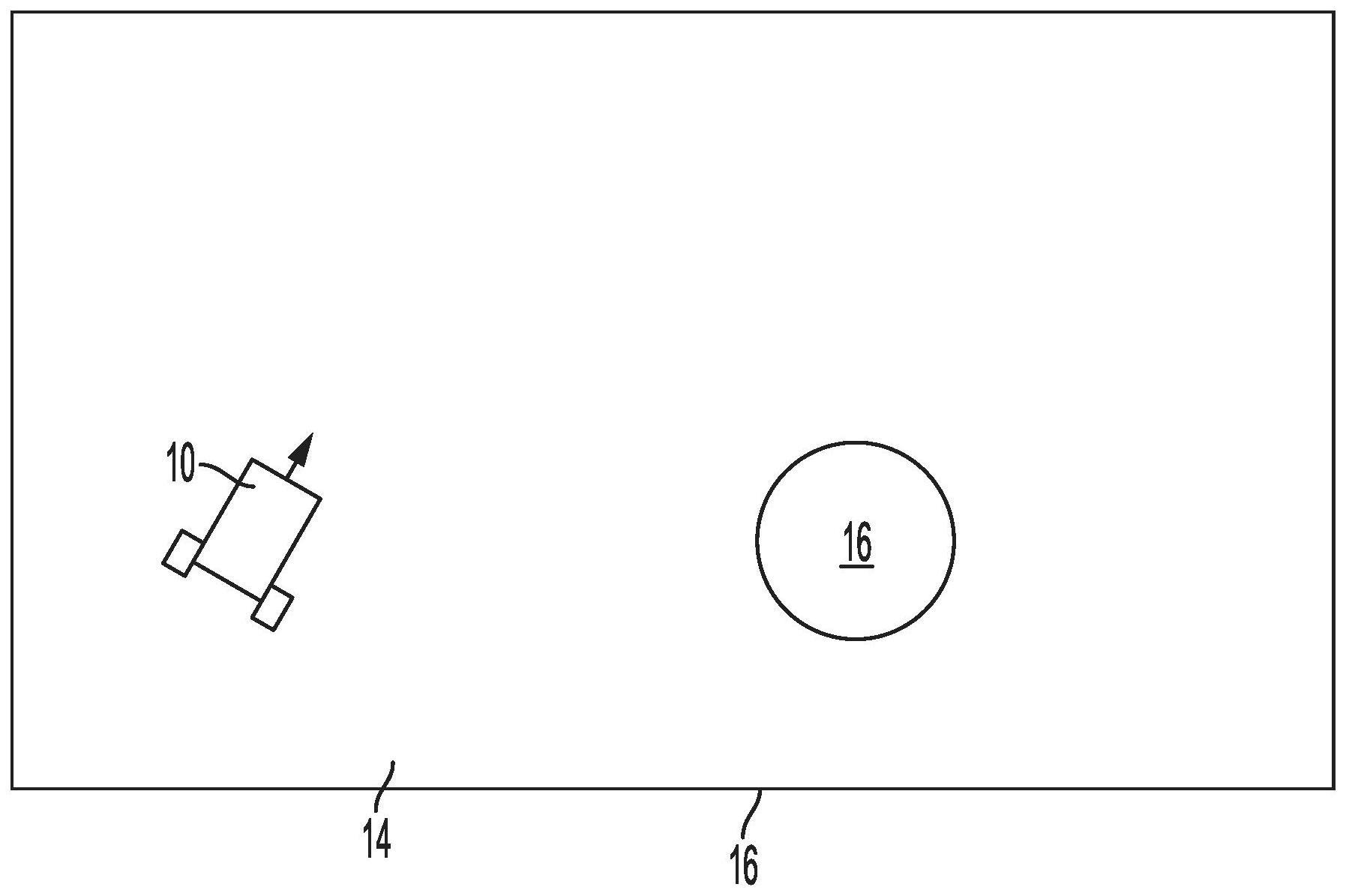
13、在另一方面,一种在存在物体的情况下使机器人园艺工具转弯的方法,其中,该机器人园艺工具包括本体,该本体具有第一端和与第一端相反的第二端,该方法包括:使机器人园艺工具在第一行进方向上运动,其中第一端用作前端;使机器人园艺工具停在与物体间隔开预定距离的第一位置处;使机器人园艺工具在第一位置时旋转;以及使机器人园艺工具在第二行进方向上远离第一位置运动,其中第二端用作前端。
14、替代地或附加地,在任何组合中,其中,机器人园艺工具包括周边,并且其中,使机器人园艺工具旋转包括使机器人园艺工具围绕位于该周边内的枢轴点旋转。
15、替代地或附加地,在任何组合中,其中,使机器人园艺工具旋转包括使机器人园艺工具旋转小于90度。
16、替代地或附加地,在任何组合中,其中,使机器人园艺工具旋转包括使机器人园艺工具旋转小于30度。
17、替代地或附加地,在任何组合中,其中,使机器人园艺工具旋转包括使机器人园艺工具旋转小于10度。
18、替代地或附加地,在任何组合中,进一步包括选择随机的旋转角度,并且其中,使机器人园艺工具旋转包括使机器人园艺工具旋转该随机的旋转角度。
19、替代地或附加地,在任何组合中,其中,选择随机的旋转角度包括选择小于或等于30度的角度。
20、替代地或附加地,在任何组合中,其中,园艺工具包括至少一个轮组件,并且其中,使机器人园艺工具在第一方向上运动包括使第一轮组件在第一旋转方向上旋转,并且其中,使机器人园艺工具在第二方向上运动包括使第一轮组件在与第一旋转方向相反的第二旋转方向上旋转。
技术特征:
1.一种机器人园艺工具,包括:
2.如权利要求1所述的机器人园艺工具,其中,该控制系统被配置为输出一个或多个信号以使该工具本体在该第一位置旋转小于90度。
3.如权利要求1所述的机器人园艺工具,其中,该控制系统被配置为输出一个或多个信号以使该工具本体在该第一位置旋转小于30度。
4.如权利要求1所述的机器人园艺工具,其中,该控制系统被配置为输出一个或多个信号以使该工具本体在该第一位置旋转小于10度。
5.如权利要求1所述的机器人园艺工具,其中,该工具本体包括周边,并且其中,该工具本体被配置为围绕定位在该周边内的工具枢转轴线旋转。
6.如权利要求1所述的机器人园艺工具,其中,当在第一方向上行进时,该工具本体以该第一端作为前端行进,并且其中,当在该第二方向上行进时,该工具本体以该第二端作为前端行进。
7.如权利要求1所述的机器人园艺工具,其中,该控制系统被配置为发送一个或多个信号以使该工具本体在该第一位置时枢转随机选择的度数。
8.如权利要求7所述的机器人园艺工具,其中,这些随机选择的度数小于30度。
9.如权利要求1所述的机器人园艺工具,进一步包括切割组件,并且其中,该切割组件包括限定防护装置轴线的刀片防护装置、以及能够相对于该刀片防护装置围绕该防护装置轴线旋转的切割刀片。
10.如权利要求9所述的机器人园艺工具,其中,该刀片防护装置包括至少一个对称轴线。
11.如权利要求9所述的机器人园艺工具,其中,该对称轴线垂直于该工具本体的纵向轴线。
12.如权利要求9所述的机器人园艺工具,其中,该切割组件被配置为在该工具本体在该第一行进方向和该第二行进方向上行进时切割植物。
13.一种在存在物体的情况下使机器人园艺工具转弯的方法,其中,该机器人园艺工具包括本体,该本体具有第一端和与该第一端相反的第二端,该方法包括:
14.如权利要求13所述的方法,其中,该机器人园艺工具包括周边,并且其中,使该机器人园艺工具旋转包括使该机器人园艺工具围绕位于该周边内的枢轴点旋转。
15.如权利要求13所述的方法,其中,使该机器人园艺工具旋转包括使该机器人园艺工具旋转小于90度。
16.如权利要求13所述的方法,其中,使该机器人园艺工具旋转包括使该机器人园艺工具旋转小于30度。
17.如权利要求13所述的方法,其中,使该机器人园艺工具旋转包括使该机器人园艺工具旋转小于10度。
18.如权利要求13所述的方法,进一步包括选择随机的旋转角度,并且其中,使该机器人园艺工具旋转包括使该机器人园艺工具旋转该随机的旋转角度。
19.如权利要求18所述的方法,其中,选择随机的旋转角度包括选择小于或等于30度的角度。
20.如权利要求13所述的方法,其中,该园艺工具包括至少一个轮组件,并且其中,使该机器人园艺工具在该第一方向上运动包括使第一轮组件在第一旋转方向上旋转,并且其中,使该机器人园艺工具在该第二方向上运动包括使该第一轮组件在与该第一旋转方向相反的第二旋转方向上旋转。
技术总结
一种在存在物体的情况下使机器人园艺工具转弯的方法,其中,该机器人园艺工具包括本体,该本体具有第一端和与第一端相反的第二端。该方法包括:使机器人园艺工具在第一行进方向上运动,其中第一端用作前端;使机器人园艺工具停在与物体间隔开预定距离的第一位置处;使机器人园艺工具在第一位置时旋转;以及使机器人园艺工具在第二行进方向上远离第一位置运动,其中第二端用作前端。
技术研发人员:李希文,蔡文浩,黎学深,吴灏林
受保护的技术使用者:创科无线普通合伙
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!