一种自动除草方法及其除草机
本发明涉及农林除草,尤其是涉及一种自动除草方法及其除草机。
背景技术:
1、在作物的幼苗期,由于杂草和作物的距离近,且杂草直接与作物竞争水分、养料和阳光,严重影响了幼苗期的作物生长。目前幼苗期农作物间的杂草主要依靠人工或除草剂来控制。人工除草效率低且成本高;除草剂虽然除草效率高,但是喷洒范围大,会导致大量除草剂喷洒到作物上,对作物构成危害且大量除草剂遭到浪费。
2、本申请人发现现有技术至少存在以下技术问题:
3、现有除草手段效率低成本高。
技术实现思路
1、本发明的目的在于提供一种自动除草方法及其除草机,以解决现有技术中存在的现有除草手段效率低成本高的技术问题。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
2、为实现上述目的,本发明提供了以下技术方案:
3、本发明提供的一种自动除草方法,包括以下步骤:
4、s100、采集刀具前方的图像信息;
5、s200、判断所采集的图像中是否具有目标作物;
6、s300、水平方向上向前推动刀具,当图像中不含有目标作物时,刀具保持在犁地位置犁除杂草;当图像中含有目标作物时,抬起刀具避开目标作物;
7、s400、刀具经过目标作物后回落至犁地位置。
8、2、根据权利要求1所述的自动除草方法,其特征在于,刀具避开农作物步骤进一步包括:
9、s301、根据刀具前进的速度调整刀具与摄像头之间的水平间距,速度越慢间距越短;
10、s302、根据刀具行驶速度以及刀具与摄像头之间的水平距离,通过延时函数智能控制器计算出刀具抬起、回落的时间。
11、在可选的实施例中,还包括如下步骤:
12、s500、根据所采集的图像信息,进行农作物目标定位后定量喷洒肥料或杀虫剂。
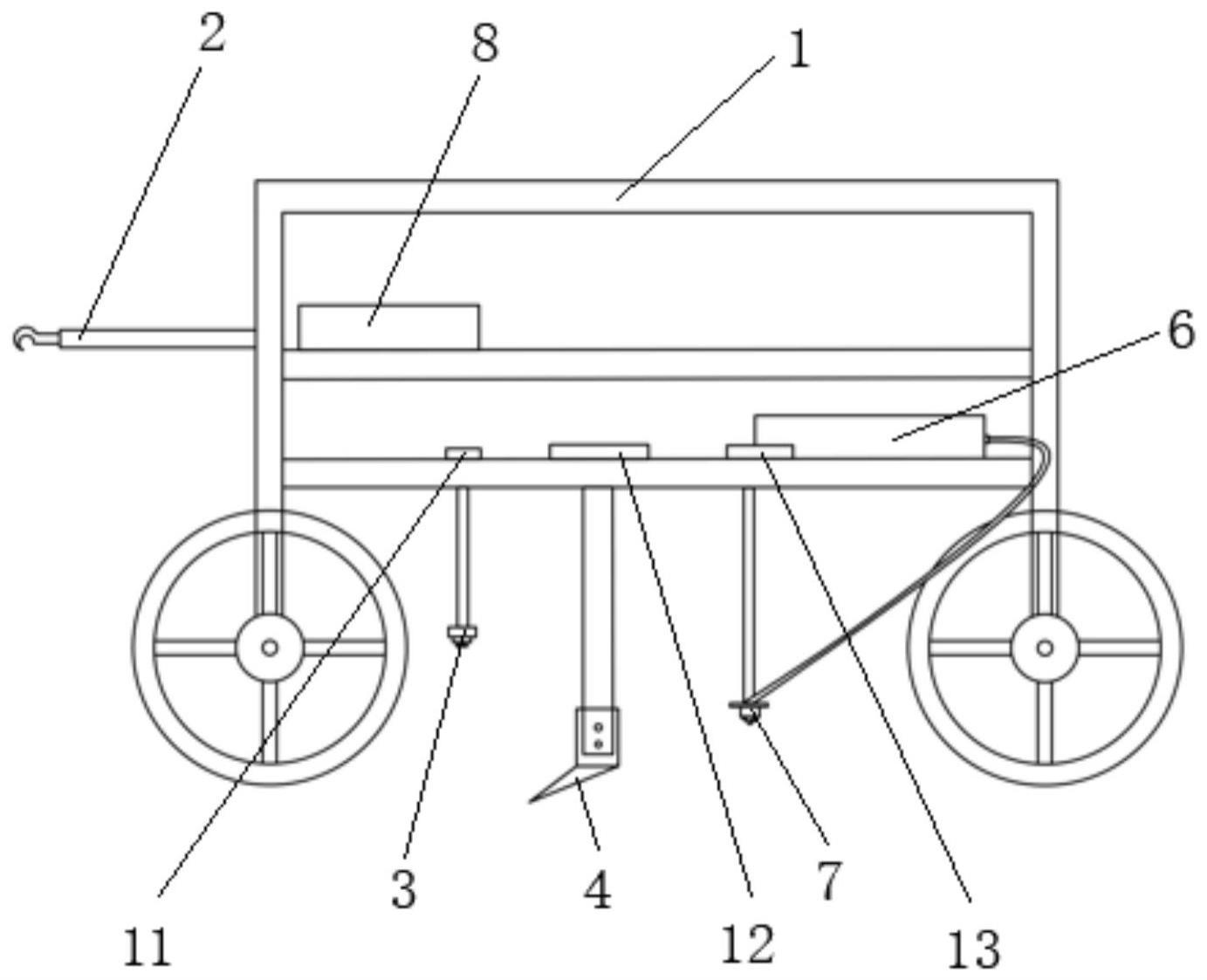
13、一种基于实现上述自动除草方法的除草机,包括:车体、驱动所述车体行进的牵引装置,以及设置在所述车体上的摄像机、刀具、驱动装置和智能控制器;
14、所述刀具位于所述车体下方,常态下所述刀具保持下落的位置状态,伴随所述车体行进犁除杂草;
15、所述摄像机采集所述刀具前方的图像信息,所述摄像机与所述智能控制器信号连接;
16、所述智能控制器与所述驱动装置信号连接,所述智能控制器通过所述驱动装置调控所述刀具的位置。
17、在可选的实施例中,所述驱动装置包括收缩缸和摆臂;
18、所述摆臂的一端与所述车体铰接,另一端设置有所述刀具;所述收缩缸的两端分别与所述车体和所述摆臂铰接。
19、在可选的实施例中,所述车体上还设置有第一滑槽,所述第一滑槽上设置有相匹配的第一滑块和第一限位件;所述第一滑槽沿所述车体的行进方向延伸,所述第一滑块沿所述第一滑槽的长度方向自由滑动,所述第一限位件用于将所述第一滑块和所述第一滑轨相互锁定,所述摄像机与所述第一滑块相连接;和/或,
20、所述车体上设置有第二滑槽,所述第二滑槽上还设置有相匹配的第二滑块和第二限位件;所述第二滑槽沿所述车体的行进方向延伸,所述第二滑块沿所述第二滑槽的长度方向自由滑动,所述第二限位件用于将所述第二滑块和所述第一滑轨相互锁定,所述刀具与所述第二滑块相连接。
21、在可选的实施例中,所述刀具为三角形,所述刀具的尖端向下倾斜20°-35°设置。
22、在可选的实施例中,所述刀具的数量为两个,两个所述刀具在同一水平位置左右对称设置,两个呈三角形的刀具合拢;
23、常态下两个所述刀具的的尾端边缘相互触接,当所述摄像机拍摄到作物后,两个所述刀具在所述驱动装置的牵动下各自左右两侧展开。
24、在可选的实施例中,还包括储存箱和电动喷头;
25、所述储存箱设置在所述车体上用于存储肥料或杀虫剂;所述电动喷头与所述储存箱管路连接,所述电动喷头与所述智能控制器信号连接。
26、在可选的实施例中,所述车体上还设置有第三滑槽,所述第三滑槽上设置有相匹配的第三滑块和第三限位件;所述第三滑槽沿所述车体的行进方向延伸,所述第三滑块沿所述第三滑槽的长度方向自由滑动,所述第三限位件用于将所述第三滑块和所述第三滑轨相互锁定,所述电动喷头与所述第三滑块相连接。
27、本发明提供的自动除草方法,包括以下步骤:s100、采集刀具前方的图像信息;s200、判断所采集的图像中是否具有目标作物;s300、水平方向上向前推动刀具,当图像中不含有目标作物时,刀具保持在犁地位置犁除杂草;当图像中含有目标作物时,抬起刀具避开目标作物;s400、刀具经过目标作物后回落至犁地位置。在除草的过程中刀具一直保持前进状态,即除草作业一直进行,除草效率高。此外还配备有图像采集功能,及时发现作物苗株并抬动刀具规避开作物苗株犁除杂草,保障高效的除草作业不会损伤目标苗株。本发明提供的自动除草方法可通过摄像机、智能控制器机械设备实现自动化除草作业,大大减小人工成本,运营费用低。综上,本发明提供的技术方案较现有除草技术具有明显优势。
技术特征:
1.一种自动除草方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自动除草方法,其特征在于,刀具避开农作物步骤进一步包括:
3.根据权利要求1所述的自动除草方法,其特征在于,还包括如下步骤:
4.一种基于实现上述自动除草方法的除草机,其特征在于,包括:车体(1)、驱动所述车体(1)行进的牵引装置(2),以及设置在所述车体(1)上的摄像机(3)、刀具(4)、驱动装置(5)和智能控制器;
5.根据权利要求4所述的除草机,其特征在于,所述驱动装置(5)包括收缩缸(51)和摆臂(52);
6.根据权利要求4所述的除草机,其特征在于,所述车体(1)上还设置有第一滑槽,所述第一滑槽上设置有相匹配的第一滑块(11)和第一限位件;所述第一滑槽沿所述车体(1)的行进方向延伸,所述第一滑块(11)沿所述第一滑槽的长度方向自由滑动,所述第一限位件用于将所述第一滑块(11)和所述第一滑轨相互锁定,所述摄像机(3)与所述第一滑块(11)相连接;和/或,
7.根据权利要求4所述的除草机,其特征在于,所述两个呈三角形的刀具(4)合拢,所述刀具(4)的尖端向下倾斜20°-35°设置。
8.根据权利要求7所述的除草机,其特征在于,所述刀具(4)的数量为两个,两个所述刀具(4)在同一水平位置左右对称设置;
9.根据权利要求4所述的除草机,其特征在于,还包括储存箱(6)和电动喷头(7);
10.根据权利要求9所述的除草机,其特征在于,所述车体(1)上还设置有第三滑槽,所述第三滑槽上设置有相匹配的第三滑块(13)和第三限位件;所述第三滑槽沿所述车体(1)的行进方向延伸,所述第三滑块(13)沿所述第三滑槽的长度方向自由滑动,所述第三限位件用于将所述第三滑块(13)和所述第三滑轨相互锁定,所述电动喷头(7)与所述第三滑块(13)相连接。
技术总结
本发明提供了一种自动除草方法及其除草机,涉及农林除草技术领域,解决了现有除草手段效率低成本高的技术问题。该自动除草方法包括采集刀具前方的图像信息;判断所采集的图像中是否具有目标作物;水平方向上向前推动刀具,当图像中不含有目标作物时,刀具保持在犁地位置犁除杂草;当图像中含有目标作物时,抬起刀具避开目标作物;刀具经过目标作物后回落至犁地位置继续犁除杂草。利用简单的机械设备和智能控制系统即可实现机械自动化除草,除草效率高且有效的节约了人工投入,较现有除草技术具有突出优势。
技术研发人员:吴艳娟,何宇哲,王云亮
受保护的技术使用者:天津理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!