基于轨道式的茶叶高效率切割采摘机器人
本发明涉及茶叶采摘相关,具体为基于轨道式的茶叶高效率切割采摘机器人。
背景技术:
1、即采摘青茶,采摘是用食指与姆指挟住叶间幼梗的中部,藉两指的弹力将茶叶摘断,采摘时间以中午十二时至下午三时前较佳,不同的茶采摘部位也不同,有的采一个顶芽和芽旁的第一片叶子叫一心一叶,有的多采一叶叫一心二叶,也有一心三叶,则另有单人式、双人式采茶机,可利用机械采茶,既省力且快速,故此,我们需要基于轨道式的茶叶高效率切割采摘机器人。
2、而目前使用的基于轨道式的茶叶高效率切割采摘机器人,不能对装置进行固定防位移,不能对装置进行高效采摘,不能对装置进行采摘过滤,不能对采摘的茶叶进行存储,快速取出,不能对切割零件进行快速更换。
技术实现思路
1、本发明的目的在于提供基于轨道式的茶叶高效率切割采摘机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
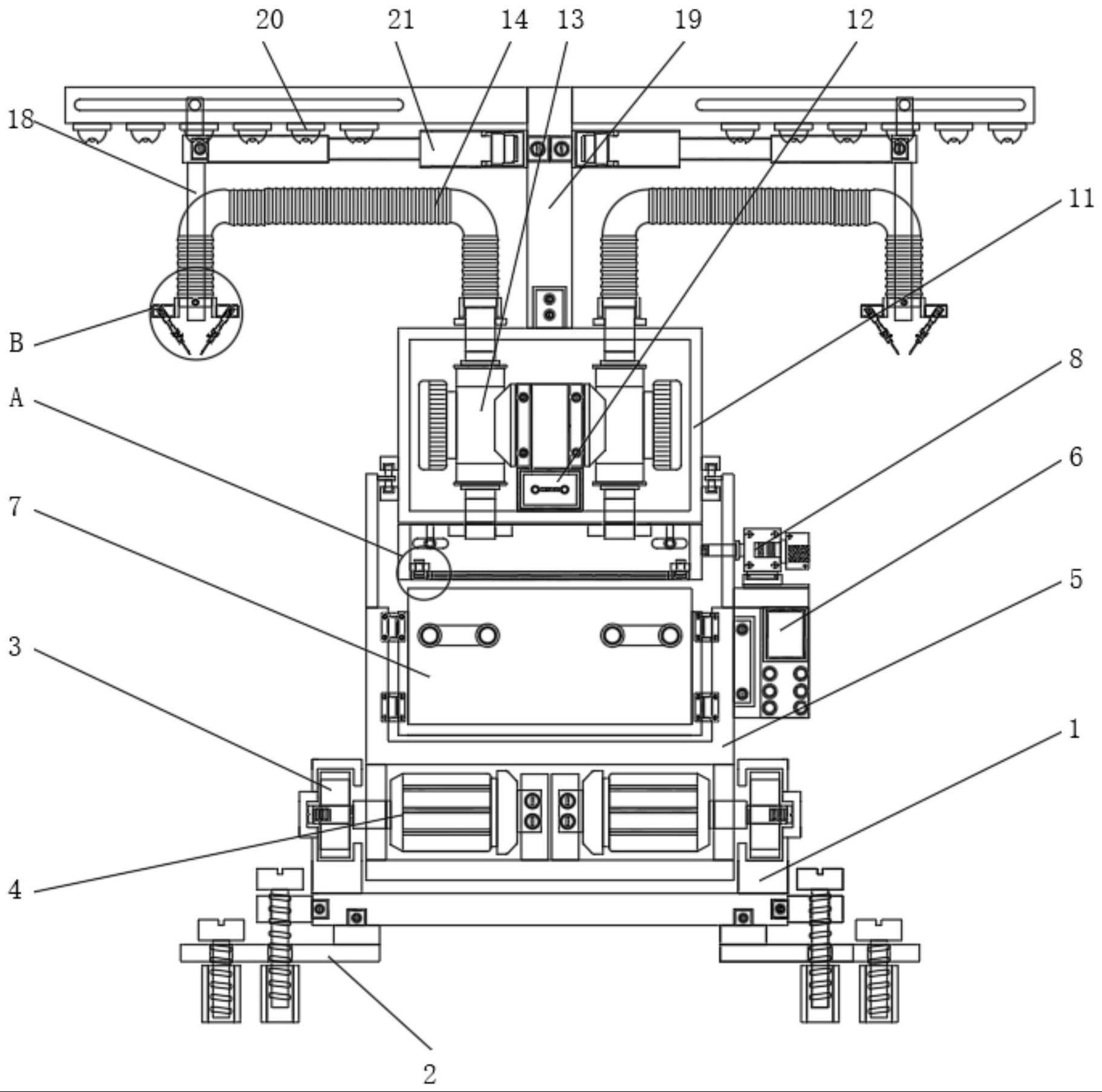
3、基于轨道式的茶叶高效率切割采摘机器人,包括导轨,所述导轨的两端均固定连接有固定机构,所述导轨的内壁安装有导轮,所述导轮的一侧固定连接有驱动电机,所述驱动电机的一端固定连接有支撑架,所述支撑架的一侧固定连接有控制器,所述支撑架的内壁安装有存储机构,所述支撑架的一侧固定连接有振动电机,所述振动电机的一端固定连接有连接箱,所述连接箱的内壁安装有过滤机构,所述连接箱的上端安装有机箱,所述机箱的内壁安装有工具箱,所述机箱的内壁均固定连接有真空泵,所述真空泵的一端安装有吸叶伸缩管,所述吸叶伸缩管的一端安装有连接口,所述连接口的两端均固定连接有第一电动推杆,所述第一电动推杆的一端固定连接有切割机构,所述连接口的上端固定连接有第一连接架,所述第一连接架的一端固定连接有第二连接架,所述第二连接架的下端均电性连接有感应器,所述第二连接架的两侧均固定连接有第二电动推杆。
4、优选的,所述固定机构包括第一连接块、第一定位杆、第二连接块、第一膨胀管、第二定位杆和第二膨胀管,所述第一连接块均固定连接在导轨的两端,所述第一连接块的内壁固定连接有第一定位杆,所述第一定位杆的外壁安装有第二连接块,所述第一定位杆的外壁固定连接有第一膨胀管,所述第二连接块的内壁固定连接有第二定位杆,所述第二定位杆的外壁固定连接有第二膨胀管。
5、优选的,所述存储机构包括第一磁块、第二磁块和存储箱,所述第一磁块固定连接在支撑架的内壁,所述第一磁块的一侧安装有第二磁块,所述第二磁块的外壁安装有存储箱。
6、优选的,所述过滤机构包括第三磁块、第四磁块和过滤筛框,所述第三磁块固定连接在连接箱的内壁,所述第三磁块的一端贴合有第四磁块,所述第四磁块的外壁安装有过滤筛框。
7、优选的,所述切割机构包括第一定位架、第二定位架、挤压轴、固定架和切割刀,所述第一定位架固定连接在第一电动推杆的一端,所述第一定位架的外壁安装有第二定位架,所述第二定位架的上端贴合有挤压轴,所述挤压轴的上端安装有固定架,所述第一定位架的一侧安装有切割刀。
8、优选的,所述机箱与连接箱活动连接,且连接箱的内壁为开孔式设计。
9、基于轨道式的茶叶高效率切割采摘机器人,包括以下步骤:
10、s1、将导轨铺设在指定位置,再将第一膨胀管与第二膨胀管埋入地下,再将第一连接块固定在导轨两侧,再将导轨贴合地面,将工具箱对机箱进行滑动打开,取出固定工具,将第一定位杆与第二定位杆对第一膨胀管与第二膨胀管进行固定涨紧;
11、s2、将第一磁块安装在支撑架内部,再将第二磁块与存储箱进行固定连接,将存储箱对支撑架进行磁力吸附固定;
12、s3、将第三磁块安装在连接箱内部,再将第四磁块对过滤筛框进行卡合固定,再将过滤筛框对连接箱进行磁力吸附固定;
13、s4、再将切割刀取出放置在第一定位架一端,再将第二定位架对第一定位架进行卡合固定,再将固定架对挤压轴进行旋转挤压,将第二定位架对第一定位架进行压实,将切割刀进行快速固定;
14、s5、最后将驱动电机打开,将控制器驱动驱动电机进行旋转,将装置进行移动,将控制器驱动感应器进行驱动感应,将感应器对需要采摘的茶叶进行扫描,将控制器驱动第二电动推杆到指定位置,将控制器驱动第一电动推杆进行推动,将真空泵打开,将真空泵驱动吸叶伸缩管进行吸附,将茶叶吸入过滤筛框上,将振动电机对过滤筛框进行振动,将过滤的茶叶存储到存储箱内部,将存储箱取出,取出茶叶。
15、与现有技术相比,本发明的有益效果是:
16、1、采用通过设置第一定位杆对第一膨胀管起到螺纹固定作用,在使用装置时,第一定位杆与第二定位杆对装置起到双重加固作用,能对装置进行固定防位移,通过设置第二磁块对存储箱起到卡合固定作用,在使用装置时,第一磁块与第二磁块的设置便于对存储箱进行快速吸附固定能对采摘的茶叶进行存储,快速取出。
17、2、采用通过设置第四磁块对过滤筛框起到卡合固定作用,在使用装置时,过滤筛框的设置能对装置进行采摘过滤,防止枝丫等异物进入,通过设置第一定位架对第二定位架起到卡合固定作用,在使用装置时,固定架的设置便于对第二定位架进行挤压,挤压轴与固定架的设置能对切割零件进行快速更换。
技术特征:
1.基于轨道式的茶叶高效率切割采摘机器人,其特征在于:包括导轨(1),所述导轨(1)的两端均固定连接有固定机构(2),所述导轨(1)的内壁安装有导轮(3),所述导轮(3)的一侧固定连接有驱动电机(4),所述驱动电机(4)的一端固定连接有支撑架(5),所述支撑架(5)的一侧固定连接有控制器(6),所述支撑架(5)的内壁安装有存储机构(7),所述支撑架(5)的一侧固定连接有振动电机(8),所述振动电机(8)的一端固定连接有连接箱(9),所述连接箱(9)的内壁安装有过滤机构(10),所述连接箱(9)的上端安装有机箱(11),所述机箱(11)的内壁安装有工具箱(12),所述机箱(11)的内壁均固定连接有真空泵(13),所述真空泵(13)的一端安装有吸叶伸缩管(14),所述吸叶伸缩管(14)的一端安装有连接口(15),所述连接口(15)的两端均固定连接有第一电动推杆(16),所述第一电动推杆(16)的一端固定连接有切割机构(17),所述连接口(15)的上端固定连接有第一连接架(18),所述第一连接架(18)的一端固定连接有第二连接架(19),所述第二连接架(19)的下端均电性连接有感应器(20),所述第二连接架(19)的两侧均固定连接有第二电动推杆(21)。
2.根据权利要求1所述的基于轨道式的茶叶高效率切割采摘机器人,其特征在于:所述固定机构(2)包括第一连接块(201)、第一定位杆(202)、第二连接块(203)、第一膨胀管(204)、第二定位杆(205)和第二膨胀管(206),所述第一连接块(201)均固定连接在导轨(1)的两端,所述第一连接块(201)的内壁固定连接有第一定位杆(202),所述第一定位杆(202)的外壁安装有第二连接块(203),所述第一定位杆(202)的外壁固定连接有第一膨胀管(204),所述第二连接块(203)的内壁固定连接有第二定位杆(205),所述第二定位杆(205)的外壁固定连接有第二膨胀管(206)。
3.根据权利要求2所述的基于轨道式的茶叶高效率切割采摘机器人,其特征在于:所述存储机构(7)包括第一磁块(701)、第二磁块(702)和存储箱(703),所述第一磁块(701)固定连接在支撑架(5)的内壁,所述第一磁块(701)的一侧安装有第二磁块(702),所述第二磁块(702)的外壁安装有存储箱(703)。
4.根据权利要求1所述的基于轨道式的茶叶高效率切割采摘机器人,其特征在于:所述过滤机构(10)包括第三磁块(1001)、第四磁块(1002)和过滤筛框(1003),所述第三磁块(1001)固定连接在连接箱(9)的内壁,所述第三磁块(1001)的一端贴合有第四磁块(1002),所述第四磁块(1002)的外壁安装有过滤筛框(1003)。
5.根据权利要求1所述的基于轨道式的茶叶高效率切割采摘机器人,其特征在于:所述切割机构(17)包括第一定位架(1701)、第二定位架(1702)、挤压轴(1703)、固定架(1704)和切割刀(1705),所述第一定位架(1701)固定连接在第一电动推杆(16)的一端,所述第一定位架(1701)的外壁安装有第二定位架(1702),所述第二定位架(1702)的上端贴合有挤压轴(1703),所述挤压轴(1703)的上端安装有固定架(1704),所述第一定位架(1701)的一侧安装有切割刀(1705)。
6.根据权利要求1所述的基于轨道式的茶叶高效率切割采摘机器人,其特征在于:所述机箱(11)与连接箱(9)活动连接,且连接箱(9)的内壁为开孔式设计。
7.基于轨道式的茶叶高效率切割采摘机器人,其特征在于:包括以下步骤:
技术总结
本发明公开了基于轨道式的茶叶高效率切割采摘机器人,包括导轨,所述导轨的两端均固定连接有固定机构,使用时,将导轨铺设在指定位置,将工具箱对机箱进行滑动打开,将第一定位杆与第二定位杆对第一膨胀管与第二膨胀管进行固定,将存储箱对支撑架进行磁力吸附固定,将固定架对挤压轴进行旋转挤压,将切割刀进行快速固定,将控制器驱动驱动电机进行旋转,将感应器对需要采摘的茶叶进行扫描,将控制器驱动第二电动推杆到指定位置,将控制器驱动第一电动推杆进行推动,将真空泵驱动吸叶伸缩管进行吸附,将振动电机对过滤筛框进行振动,将存储箱取出,取出茶叶,就这样基于轨道式的茶叶高效率切割采摘机器人就完成了。
技术研发人员:代云中,陈勇吏,刘杨,刘铭煊,颜麟沣,邓针金,杨新茂,蒋天宸,杨威,罗洋,杨昕,唐浩,严才秀,唐思均,杨彬
受保护的技术使用者:宜宾职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!