一种基于植物生长的采摘方法及采摘系统
本发明涉及智慧农业,具体涉及一种基于植物生长的采摘方法及采摘系统。
背景技术:
1、这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
2、研究发现,机器人采摘装置结合大数据处理来提高采摘效率、性能、准确度是具有广阔前景的,但是如何满足市场对于果实大小、形状、成熟度差异性、多样性需求是采摘系统亟需要解决的问题,发明专利cn107966944b中公开了智慧大棚分区控制系统及分区采摘方法,包括监控装置、数据监控及分析处理中心和反馈执行终端。监控装置在各个子区间三维度拍摄大棚内植物成长状况图像,并将成长状况图像发送至数据监控及分析处理中心。数据监控及分析处理中心接收并分析植物成长状况图像,判定子区间的可采摘区域,定位可采摘区域并将定位数据发送至反馈执行终端。反馈执行终端接收定位数据后进行定点区域的采摘作业。上述技术提供的控制系统,可以快速找到可采摘区域,从而提高了采摘效率,降低了人工成本。但此方式还是建立在区域划分的前提下,对于采摘精度还是有一定局限性,判定可采摘区域时,果实会被枝叶遮挡,无法准确全面的掌握采摘内容,导致部分果实会漏采。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种基于植物生长的采摘方法及采摘系统,能够准确的掌握采摘内容且对数据处理设备的要求低。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、第一方面,本发明的实施例提供了一种基于植物生长的采摘方法,包括以下步骤:
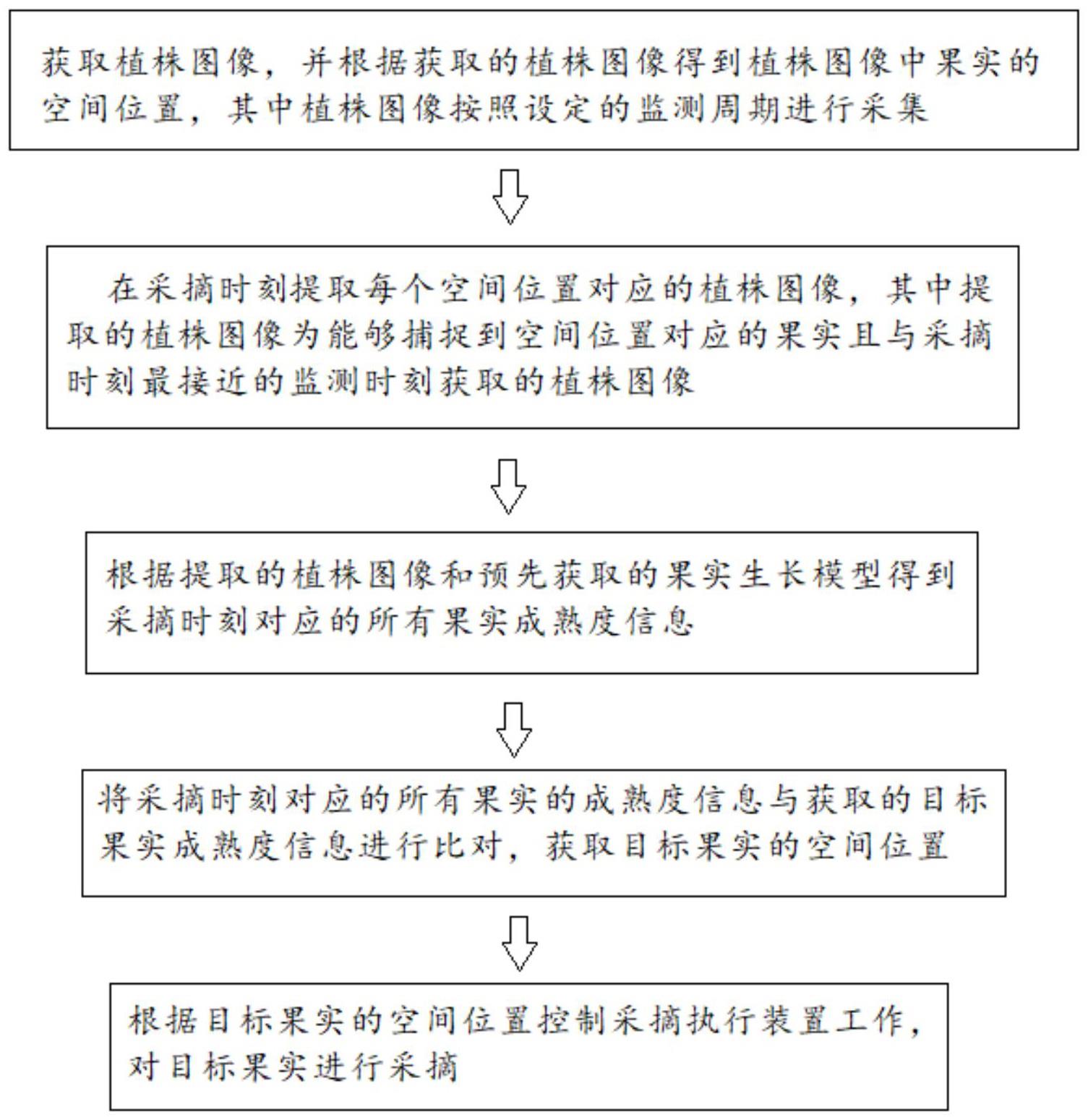
4、获取植株图像,并根据获取的植株图像得到植株图像中果实的空间位置,其中植株图像按照设定的监测周期进行采集。
5、在采摘时刻提取每个空间位置对应的植株图像,其中提取的植株图像为能够捕捉到空间位置对应的果实且与采摘时刻最接近的监测时刻获取的植株图像。
6、根据提取的植株图像和预先获取的果实生长模型得到采摘时刻对应的所有果实成熟度信息。
7、将采摘时刻对应的所有果实的成熟度信息与获取的目标果实成熟度信息进行比对,获取目标果实的空间位置。
8、根据目标果实的空间位置控制采摘执行装置工作,对目标果实进行采摘。
9、可选的,将植株的生长时间划分为多个阶段,按照植株的生长过程,依次设置的每个阶段内的监测周期逐渐缩短。
10、可选的,多个阶段分别为依次设置的生长阶段、发育阶段和成熟阶段,其中成熟阶段内的监测周期为1-4天。
11、可选的,根据提取的植株图像获取对应的监测时刻的果实成熟度信息,根据监测时刻与采摘时刻的时间差值结合预先存储的果实生长模型获取采摘时刻的果实成熟度信息。
12、可选的,所述果实成熟度信息包括果实的尺寸及果实的颜色。
13、可选的,获取植株图像后,对枝条进行识别并对枝条进行编号,以枝条编号为母编号,对枝条上的果实进行母编号下的子编号,然后将果实的空间位置进行存储。
14、可选的,获取多个监测时刻的植株图像,并根据植株图像获取果实的成熟度信息,将同一个空间位置的果实对应的多个监测时刻的成熟度信息生成直观显示图。
15、第二方面,本发明的实施例提供了一种基于植物生长的采摘系统,包括:图像采集装置、数据处理装置及采摘执行装置。
16、所述图像采集装置:用于按照监测周期采集大棚内各个植株的图像,并将植株图像传输给数据处理装置。
17、所述数据处理装置:用于接收图像采集装置传递的植株图像,并执行第一方面所述的基于植物生长的采摘方法步骤。
18、所述采摘执行装置:用于接收到数据处理装置传递的目标果实空间位置后进行采摘工作。
19、可选的,还包括环境监测装置,用于监测植物生长环境数据,与数据处理装置连接,将采集的环境数据传输给数据处理装置。
20、可选的,所述环境监测装置包括温度传感器、湿度传感器及光照传感器。
21、本发明的有益效果如下:
22、1.本发明的采摘方法,按照监测周期对植株的图像进行采集,图像采集贯穿整个植株的生长过程,只要枝条上的果实存在不被枝叶遮挡的时刻即可通过图像采集进行定位,进行果实成熟度信息获取时,结合了植株图像和果实生长模型,只要果实能够被采集图像,就可以获取采摘时刻的成熟度,因此,采摘时精准定位到每一个果实的生长变化过程,保证一定时间内对果实位置的准确全面把握,极大的降低了果实采摘时由于受枝叶阻挡而造成的漏采概率。
23、2.本发明的采摘方法,采摘时获取果实成熟度信息,提取并分析的植株图像为能够捕捉到果实空间位置对应的果实,且与采摘时刻最接近的监测时刻对应的植株图像,每次采摘时不是对所有植株图像对应的果实成熟度信息进行分析处理,数据处理量小,提高了采摘效率。
24、3.本发明的采摘方法,根据获取的目标果实的位置信息控制采摘设备进行采摘,采摘的时候不需要实时采集图像,减少了信息处理量,降低了对相应数据处理设备的要求,结合果实生长模型,对采摘时刻某个空间位置的果实的成熟度就能够实现预判,采摘机器人直接去采摘,工作效率高。
技术特征:
1.一种基于植物生长的采摘方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于植物生长的采摘方法,其特征在于,将植株的生长时间划分为多个阶段,按照植株的生长过程,依次设置的每个阶段内的监测周期逐渐缩短。
3.如权利要求2所述的一种基于植物生长的采摘方法,其特征在于,多个阶段分别为依次设置的生长阶段、发育阶段和成熟阶段,其中成熟阶段内的监测周期为1-4天。
4.如权利要求1所述的一种基于植物生长的采摘方法,其特征在于,根据提取的植株图像获取对应的监测时刻的果实成熟度信息,根据监测时刻与采摘时刻的时间差值结合预先存储的果实生长模型获取采摘时刻的果实成熟度信息。
5.如权利要求1所述的一种基于植物生长的采摘方法,其特征在于,所述果实成熟度信息包括果实的尺寸及果实的颜色。
6.如权利要求1所述的一种基于植物生长的采摘方法,其特征在于,获取植株图像后,对枝条进行识别并对枝条进行编号,以枝条编号为母编号,对枝条上的果实进行母编号下的子编号,然后将果实的空间位置进行存储。
7.如权利要求1所述的一种基于植物生长的采摘方法,其特征在于,获取多个监测时刻的植株图像,并根据植株图像获取果实的成熟度信息,将同一个空间位置的果实对应的多个监测时刻的成熟度信息生成直观显示图。
8.一种基于植物生长的采摘系统,其特征在于,包括:图像采集装置、数据处理装置及采摘执行装置;
9.如权利要求8所述的一种基于植物生长的采摘系统,其特征在于,还包括环境监测装置,用于监测植物生长环境数据,与数据处理装置连接,将采集的环境数据传输给数据处理装置。
10.如权利要求9所述的一种基于植物生长的采摘系统,其特征在于,所述环境监测装置包括温度传感器、湿度传感器及光照传感器。
技术总结
本发明涉及一种基于植物生长的采摘方法及采摘系统,属于智慧农业技术领域,解决了现有智慧大棚采摘时容易漏采的问题,包括以下步骤:获取植株图像,得到植株图像中果实的空间位置;需要采摘时,提取每个空间位置对应的植株图像,其中提取的植株图像为能够捕捉到空间位置对应的果实且与采摘时刻最接近的监测时刻获取的植株图像;根据提取的植株图像和预先获取的果实生长模型得到采摘时刻对应的所有果实的成熟度信息;将采摘时刻对应的所有果实的成熟度信息与获取的目标果实成熟度信息进行比对,获取目标果实的空间位置;根据目标果实的空间位置控制采摘执行装置工作,本发明的方法能够实现果实的精准采摘,降低漏采的概率。
技术研发人员:张进,李梅,张彬彬,丁宗广,杨硕林
受保护的技术使用者:山东农业工程学院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!