基于柔性手爪的类球形水果采摘机器人及采摘分拣方法
本发明属于自动控制领域,涉及一种基于柔性手爪的类球形水果采摘机器人及采摘分拣方法。
背景技术:
1、伴随着科技的进步,农业生产正逐步实现机械化。为加快农业机械化发展,减轻作业者的劳动强度,解放更多农业劳动力,压缩农业生产成本,迫切需要深入开展采摘机器人相关理论与技术的研究。我国作为最大的水果生产国和消费国,水果产业已经成为农业中很重要的一部分,随着劳动力资源短缺以及机械自动化技术的迅速发展,利用机器人采摘替代人工作业成为必然趋势,因为类球形果实在水果中占比较高,所以开发类球形水果采摘机器人用于果园收获作业具有重要意义。
2、近年来在水果采摘机器人领域的研究取得了较大进展,但同时现有研究仍存在一定的局限性,难以应用于真实采摘场景代替人工收获,现阶段市场的水果采摘机器人主要存在以下问题:1.采摘速度较慢。大部分水果采摘机器人每次采摘均要经过“伸”、“采”、“收”的过程,造成单个果实采摘周期长,即使提高机械臂运动速度也很难达到人工采摘的效果,从而影响采摘效率;2.造成果实损伤。刚性末端执行器自适应性较差,在采摘时特别容易对果实造成伤害,使之品质下降;3.仅完成采摘作业。水果采摘机器人仅完成采摘作业,采摘完成后腐烂与未腐烂果实的分拣作业更是繁重的工作,存在分拣效率低、分拣精度差等问题。
3、本发明以水果采摘为应用场景,针对现阶段水果采摘机器人仅完成采摘作业且采摘速度较慢、造成果实损伤等问题,自主设计了一种基于柔性手爪的类球形水果采摘机器人及采摘分拣方法,实现了对类球形水果的柔性摘取,有效降低果实损伤率。进一步地,末端执行器对类球形水果进行采摘,摘下的果实直接通过伸缩软管进入下方的分拣装置中,大大提高了采摘和分拣效率。
技术实现思路
1、本发明的目的在于提供一种基于柔性手爪的类球形水果采摘机器人及采摘分拣方法。
2、本发明的技术方案如下:一种基于柔性手爪的类球形水果采摘机器人,所述采摘机器人的硬件结构包括采摘装置和分拣装置;
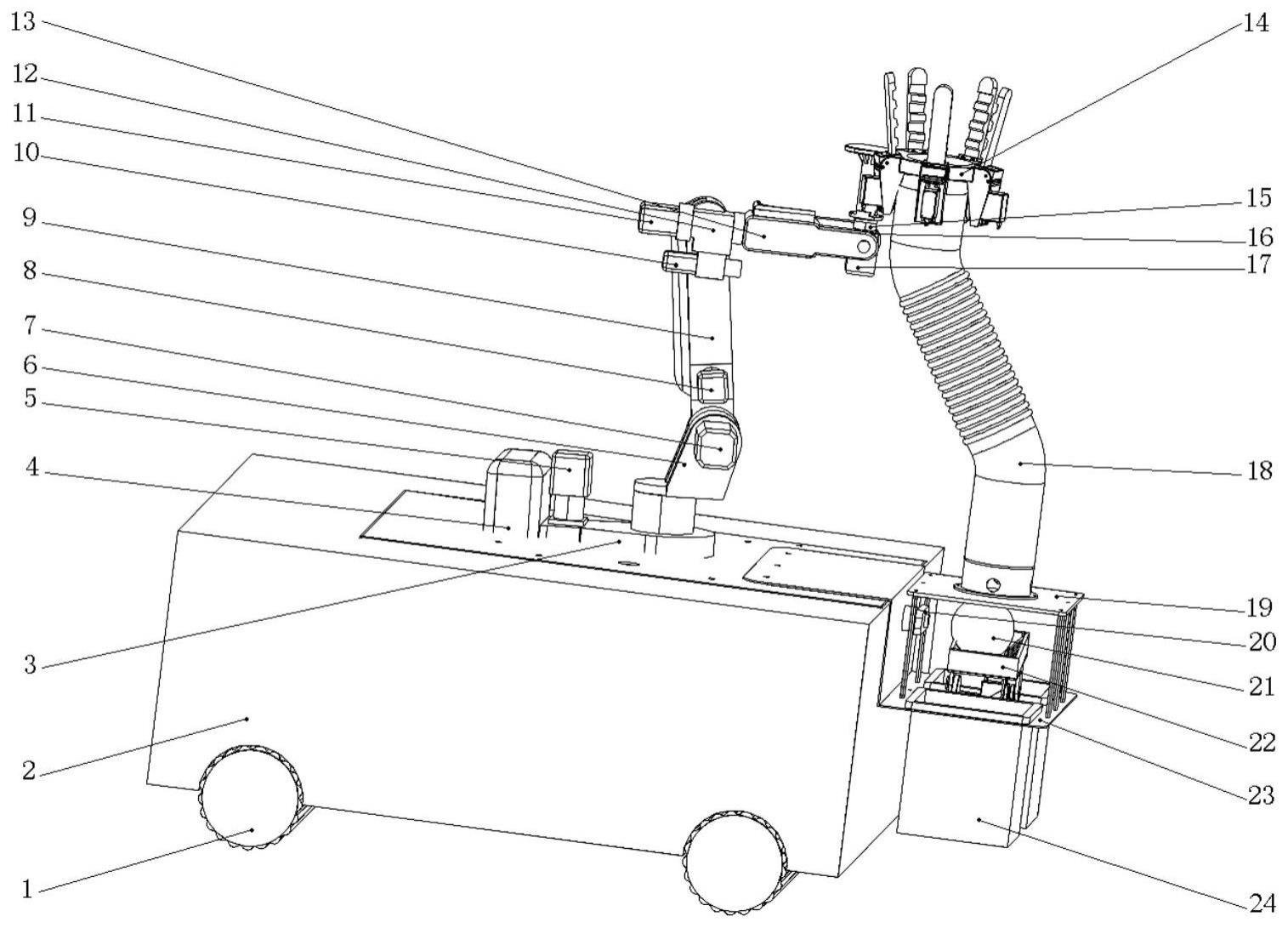
3、所述的采摘装置包括机械臂底座(3)、控制器(4)、底座旋转电机(5)、机械臂装置、末端执行器(14);所述机械臂底座(3)固定于底盘(2)上,控制器(4)固定于机械臂底座(3)上,所述机械臂底座(3)与机械臂装置的一端旋转连接,底座旋转电机(5)固定在机械臂底座(3)上,底座旋转电机(5)通过传送带与第一机械臂(6)旋转连接;所述机械臂装置的另一端与末端执行器(14)固定连接;
4、所述的分拣装置包括第一固定板(19)、摄像头(20)、分拣盘(22)、第二固定板(23)、收集箱(24)、铜柱(25)、分拣盘舵机(26)、连接端口(27);末端执行器(14)通过伸缩软管(18)与分拣装置连接,所述分拣装置通过第二固定板(23)固定在底盘(2)上,第一固定板(19)与第二固定板(23)通过铜柱(25)固定连接,伸缩软管(18)通过连接端口(27)与分拣装置固定连接,所述连接端口(27)安装在第一固定板(19)上;摄像头(20)与收集箱(24)固定在第二固定板(23)上,摄像头(20)正对类球形水果(21)所在区域;薄膜压力传感器(221)安装在分拣盘(22)内侧底部,类球形水果(21)掉落后位于薄膜压力传感器(221)中心区域。
5、优选地,所述采摘装置中的机械臂装置包括所述第一机械臂(6)、第一旋转电机(7)、第二机械臂(9)、第二旋转电机(8)、第三机械臂(12)、第三旋转电机(10)、第四机械臂(13)、第四旋转电机(11)、第五机械臂(16)、第五旋转电机(17)、第六机械臂(15);所述第一旋转电机(7)固定在第一机械臂(6)上,第一机械臂(6)与第二机械臂(9)旋转连接,第二旋转电机(8)固定在第二机械臂(9)上,第二旋转电机(8)通过传送带与第三机械臂(12)旋转连接,第三旋转电机(10)与第四旋转电机(11)固定在第三机械臂(12)上,第三旋转电机(10)通过传送带与第四机械臂(13)旋转连接,第四旋转电机(11)通过传送带与第五机械臂(16)旋转连接,第四机械臂(13)与第五机械臂(16)旋转连接,第五旋转电机(17)固定在第五机械臂(16)内部,第五机械臂(16)与第六机械臂(15)旋转连接。
6、优选地,所述采摘装置中末端执行器(14)为柔性手爪,包括夹爪舵机(141)、手爪底盘(142)、柔性手指(143)、舵盘(144)、固定柱(145);所述夹爪舵机(141)、舵盘(144)均固定在手爪底盘(142)上,柔性手指(143)一端与手爪底盘(142)固定连接,末端执行器(14)通过固定柱(145)与第六机械臂(15)固定连接。
7、优选地,所述柔性手爪的制作过程为:首先将磁铁和磁传感器置于手指模具的指尖凹槽中,然后把硅胶ecoflex 0050的a液、b液等量充分混合后倒入设计的手指模具中,并将钢片放入硅胶液中,待硅胶固化后脱模可得到柔性手指。接下来将五根柔性手指等距固定在手爪底盘上,最后用钓鱼线作为u形肌腱驱动柔性手指,以实现不同程度的弯曲变形。钢片增加了手指硬度,同时外层硅胶包裹住钢片,保证了手指的柔软度。指尖装配的磁铁和磁传感器,可通过检测磁场改变来检测接触压力的变化。
8、优选地,所述末端执行器(14)中的柔性手指(143)包括磁铁(1431)、磁传感器(1432)、钓鱼线(1433)、上层硅胶(1434)、钢片(1435)、下层硅胶(1436);钢片(1435)增加了手指的硬度;上层硅胶(1434)与下层硅胶(1436)包裹住钢片(1435),保证了手指的柔软度;指尖装配有磁铁(1431)和磁传感器(1432),可通过检测磁场改变来检测接触压力的变化;钓鱼线(1433)穿过柔性手指(143),一端固定在舵盘(144)上,作为u形肌腱驱动柔性手指(143)实现不同程度的弯曲变形。
9、本发明还提供了一种基于柔性手爪的类球形水果采摘机器人采摘分拣方法,所述采摘分拣方法应用于所述的采摘机器人,所述的采摘分拣方法包括:
10、步骤s1:控制器(4)驱动机械臂到达指定位置;
11、步骤s2:单片机(32)驱动柔性手爪包络住类球形水果;
12、步骤s3:柔性手爪缓慢收紧,指尖磁传感器(1432)向单片机(32)发送磁感应强度;
13、步骤s4:判断磁感应强度是否到达阈值;若否则返回步骤s3,若是则执行步骤s5;
14、步骤s5:单片机(32)驱动柔性手爪采摘类球形水果;
15、步骤s6:将类球形水果通过伸缩软管(18)输送至分拣盘(22);
16、步骤s7:判断分拣盘(22)内侧底部的薄膜压力传感器(221)是否采集到压力信号;若否则返回步骤s6,若是,则执行步骤s8;
17、步骤s8:通过串口向工控机(29)发送信号,工控机(29)驱动摄像头(20)拍照;
18、步骤s9:利用卷积神经网络对所拍照片进行分类,判断果实是否腐烂;若类球形水果腐烂,则单片机(32)驱动分拣盘(22)正转;若类球形水果未腐烂,则单片机(32)驱动分拣盘(22)反转;类球形水果掉入相应的收集箱(24)中完成分拣。
19、本发明提供的一种基于柔性手爪的类球形水果采摘机器人及采摘分拣方法,具有如下有益效果:1.柔性手爪的设计与制备。为有效降低果实损伤率以延长贮藏期,该发明自主设计了一款柔性手爪。制作过程为:首先将磁铁和磁传感器置于手指模具的指尖凹槽中,然后把硅胶ecoflex 0050的a液、b液等量充分混合后倒入设计的手指模具中,并将钢片放入硅胶液中,待硅胶固化后脱模可得到柔性手指。接下来将五根柔性手指等距固定在手爪底盘上,最后用钓鱼线作为u形肌腱驱动柔性手指,以实现不同程度的弯曲变形。钢片增加了手指硬度,同时外层硅胶包裹住钢片,保证了手指的柔软度。指尖装配的磁铁和磁传感器,可通过检测磁场改变来检测接触压力的变化。该柔性手爪可极大程度地模仿人的抓取动作,对类球形水果进行包络,自适应抓取能力较强。2.类球形水果采摘和分拣装置。为提高采摘和分拣效率,该发明自主设计了一款采摘和分拣一体化设备,末端执行器对类球形水果进行采摘,摘下的果实直接通过伸缩软管落入下方的分拣装置中完成分拣。其中,分拣装置用来实现腐烂水果与未腐烂水果的分类。
- 还没有人留言评论。精彩留言会获得点赞!