一种多自由度果园柑橘自动挖土施肥及回填装置
本发明涉及自动施肥,尤其涉及一种多自由度果园柑橘自动挖土施肥及回填装置。
背景技术:
1、广西地处我国南部,温热的气候适宜多种水果生长,是全国首屈一指的水果大省。在果园果树种植过程中,肥料的施用是一个非常重要的环节。以广西地区普遍种植的中等高度的果树柑橘为例,如何在柑橘树的各个生长阶段及时有效的施用其生长所需要的肥料,对于促进柑橘生长,增加柑橘产量具有非常重要的作用。在大面积的柑橘种植中,肥料的施用大多是通过半机械化的方式进行,即人工驾驶专门的肥料施用机器对柑橘施用定量的肥料,相比于人工施用更加快速高效。但半机械化的施肥方式需要专门的技术人员,同时肥料的施用多采用定量的方式进行,难以实现肥料施用量的针对性管理。因此,需要设计一种智能化,自动化的果园柑橘自动挖土施肥及回填装置。
技术实现思路
1、本发明的目的在于提供一种多自由度果园柑橘自动挖土施肥及回填装置,解决传统定量施肥造成的肥料浪费、污染,无法根据每一颗果树的情况进行精准施肥的技术问题。
2、将无人机低空遥感与自动控制技术相结合,可实现针对不同土质状况用最小的挖掘力度最大的电力功率实现挖土施肥作业,可大大提高能源利用率,可适应不同生长时期下柑橘的施肥所需,同时可以根据果园中柑橘的实际生长状况施用适合柑橘生长所需的肥料,从而实现肥料的精准施用。
3、利用自动施肥装置,不仅能够实现大面积快速施肥,还可以根据果园中柑橘的生长状况(大小、高度、色泽)进行小区域化的肥料精准施用,在满足不同生长状况下柑橘对肥料需求的同时,节省更多肥料,并降低人力的需求,进一步提高柑橘的产量并扩大柑橘种植面积。
4、为了实现上述目的,本发明采用的技术方案如下:
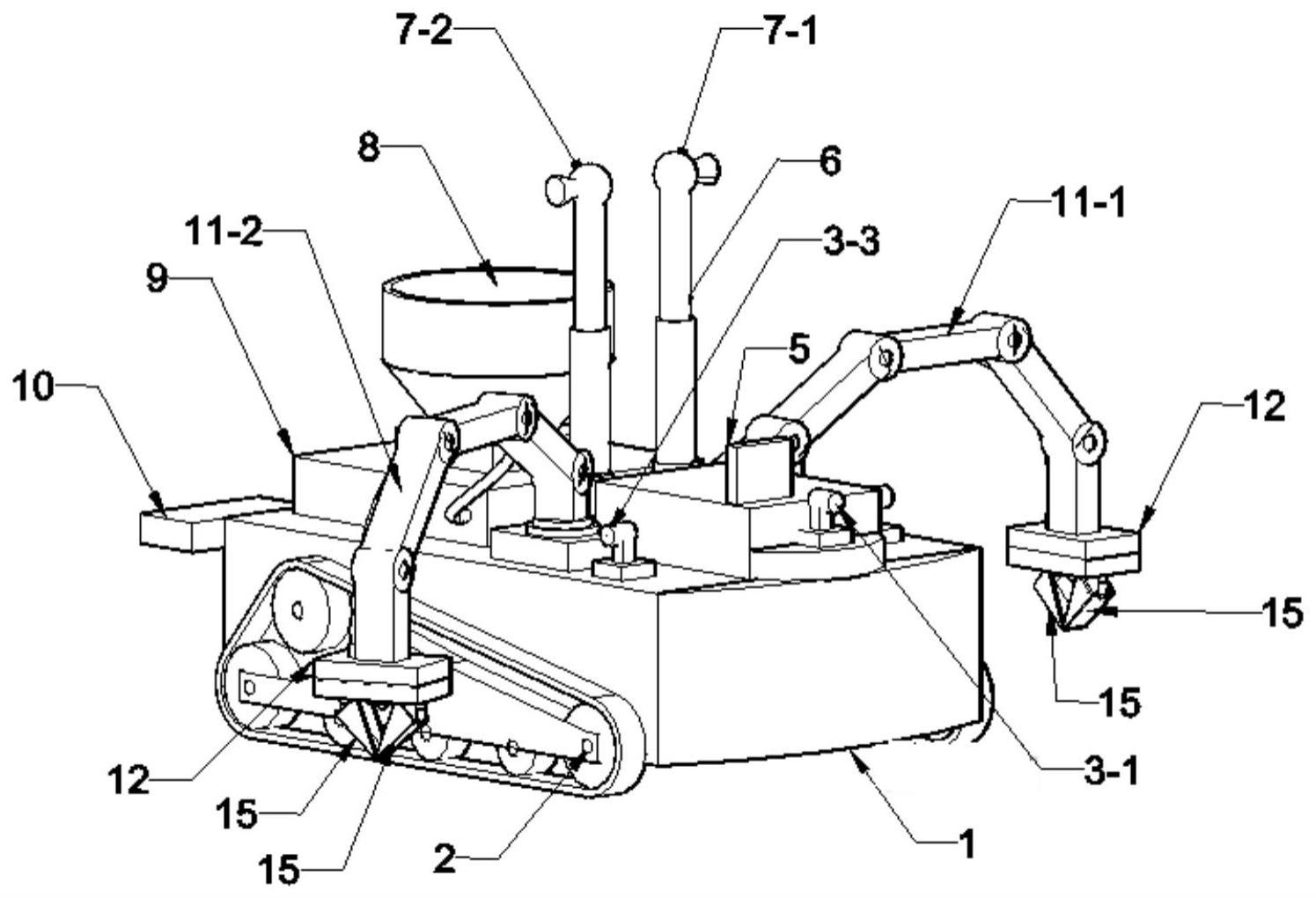
5、一种多自由度果园柑橘自动挖土施肥及回填装置,包括装置运载车、t型履带、数据处理装置、深度相机、触控显示屏、升降液压臂、可旋转叶面肥施放喷头、机械臂、挖掘装置体、挖铲、电动液压臂、肥料喷头、肥料加压装置、肥料贮存仓、机械臂托台、肥料输送导管、红外传感器和rgb相机。t型履带设置在装置运载车的两侧,用于带动装置运载车运动,数据处理装置安装在装置运载车上,深度相机安装在装置运载车前侧、左侧和右侧,触控显示屏安装在装置运载车上,升降液压臂安装在装置运载车上,升降液压臂用于调整可旋转叶面肥施放喷头的水平高度,可旋转叶面肥施放喷头安装在升降液压臂顶端,用于施放叶面肥,机械臂安装在装置运载车左右两侧,挖掘装置体安装在机械臂末端,用于给挖铲和肥料喷头提供安装位置,并带动挖铲和肥料喷头运动,挖铲,安装于机械臂末端,挖铲上安装一个柔性传感器,电动液压臂安装在挖掘装置体上,电动液压臂用于控制挖铲的开合,
6、肥料喷头,安装于挖铲内部,用于施肥,肥料加压装置,安装在肥料存储仓下方,对输送的肥料加压,肥料贮存仓,安装在装置运载车上,用于存储肥料,机械臂托台,安装于装置运载车的后边,用于放置机械臂,肥料输送导管,沿机械臂安装,用于将肥料从肥料贮存仓输送到肥料喷头处,红外传感器,安装于挖掘装置体上,rgb相机,安装于挖掘装置体上。
7、进一步地,还包括无人机遥感平台,在施肥工作开始前,利用无人机遥感平台获取装置运载车将要工作地点的地理信息和柑橘的图像信息,对整块果园区域的柑橘按照生长状况进行小区域划分和标号,生成相应的柑橘生长状况信息地图,判断柑橘树施肥类型是单施固态肥还是单施液态叶面肥还是两种类型肥料同时施放,并由此规划施肥装置车的行进路线,柑橘的图像信息的图像信息判断柑橘生长的状况,同时根据柑橘树的图像信息获取柑橘树大小,并统计叶片数量,然后根据叶片数量、叶片的生长颜色和柑橘树大小进行得出每一颗柑橘树对应的需要施相应肥和施肥量。
8、进一步地,数据处理装置用于处理深度相机所采集环境图像数据集,并根据无人机飞行采集的柑橘生长信息包括与柑橘高产所需元素的信息,分析结果生成控制指令,并由自动控制装置调整工作状态,驱动装置由4台功率直流电机和相应的传动结构构成,由设置的电源装置提供电能,由控制装置根据数据处理装置的指令控制电机的转速,将电机产生的动力传输至履带,从而实现施肥装置的移动,挖掘装置体上的红外传感器用于检测挖铲到地面的距离,进而控制挖铲的挖土深度,挖掘装置体上设置有湿度传感器,湿度传感器设置在挖掘装置体的内部,湿度传感器检测泥土的湿度。
9、进一步地,肥料的施放和回填过程为,采用机械臂带动挖铲,根据果树的大小提前设定好的挖土施肥的位置、深度、肥料的多少,在距离果树设定位置处,通过控制装置控制机械臂使挖铲往下挖土,待挖铲完成挖土工作后,再经由电动液压臂控制挖铲的打开,由肥料加压装置将果树所需肥料运送至肥料喷头,控制肥料喷头释放肥料,机械臂抬起,锥形头离开地面后再合上,完成肥料的施放和填土。
10、进一步地,施肥及回填装置的工作过程包括如下步骤:
11、步骤1:在施肥工作开始前,利用无人机遥感平台获取施肥装置运载车将要工作地点的地理信息和柑橘的图像信息,对整块果园区域的柑橘按照生长状况进行小区域划分和标号,生成相应的柑橘生长状况信息地图,判断柑橘树施肥类型是单施固态肥还是单施液态叶面肥还是两种类型肥料同时施放,并由此规划施肥装置车的行进路线;
12、步骤2:利用拖车将施肥装置车运送至指定的工作地点的起始位置;
13、步骤3:施肥及回填装置的机械臂由折叠状态伸展开来,获取本次施肥作业的类型,装置车自检项目,自检通过后开始工作;
14、步骤4:装置运载车开始前进,由装置运载车前方的深度相机采集前方的路况,及时调整施肥装置车的行进路径;
15、步骤5:当施肥作业类型为单施固态肥时,左右两边深度相机实时采集左右两侧柑橘树的情况,利用柑橘树快速定位控制方法,判断左右两侧是否有树,当一侧或两侧存在柑橘树的时,装置驻停,数据处理装置对采集的图像信息进行处理,根据施肥装置车的位置信息及采集的图像信息,与预先根据无人机遥感平台获取的柑橘生长状况信息规划的路径地图进行匹配,确认施肥装置车当前行驶位置的柑橘树,数据处理装置利用u-net神经网络构建柑橘树冠层图像获取深度信息并计算出装置到树的距离,以确定挖土施肥的坐标位置;
16、步骤6:针对该柑橘树的生长状况,采用机械臂带动挖铲旋转至挖掘坐标方向,伸展机械臂,到达挖掘坐标点并使挖掘装置垂直向下;
17、步骤7:通过挖掘装置上的红外传感器判断挖掘装置距地距离,通过挖掘装置上的rgb相机判断泥土类型以及是否存在大块石头,通过挖掘装置上内置的湿度传感器判断泥土类型,综合得到的数据,根据柔和度控制方法进行控制挖土;
18、步骤8:根据果树的大小提前设定好的挖土施肥的位置、深度、肥料的多少,经由伺服电动液压臂控制挖铲的打开,由所述肥料加压装置将果树所需肥料运送至肥料喷头,控制肥料喷头释放适宜的肥料量喷出后,机械臂抬起;
19、步骤9:施放设定肥料后,机械臂旋转到左边25°处,将之前的泥土拨回去,实现泥土回填,至此完成一颗柑橘树的施肥工作,当施肥装置车行进至下一个目标果树位置时,重复上述调整流程,以适应新果树的施肥需求;
20、步骤10:当施肥作业类型为单施液态叶面肥时,前方深度相机采集施肥装置车行进路径前方的环境信息,由左边深度相机锁定当前果树距离信息,所述数据处理装置对采集的图像信息进行处理,根据施肥装置车的位置信息及采集的图像信息,与预先根据无人机遥感平台获取的柑橘生长状况信息规划的路径地图进行匹配,确认施肥装置车当前行驶位置的柑橘树,针对该柑橘树的生长状况,通过叶面肥施放控制方法调整升降液压臂的升降,以及可旋转肥料喷头,将适宜的液态肥料喷射到对应的柑橘树上;
21、步骤11:当施肥装置车行进至下一个目标果树位置时,重复上述调整流程,以适应新果树的施肥需求,装置车左右两边的可旋转喷头可独立工作;
22、步骤12:当施肥作业类型为两种类型肥料同时施放时,实现固态肥的施放再完成液态叶面肥的施放;
23、步骤13:获取施肥装置车当前位置,检查是否已完成规划路线,若已全部完成,则施肥装置车停驻,等待技术人员的下一步操控指令。
24、进一步地,柔和度控制方法包括如下步骤:
25、步骤7.1:机械臂伸展到开挖地点,挖掘装置垂直向下,挖掘装置上搭载的红外传感器实时判断挖掘装置距地距离;
26、步骤7.2:挖掘装置上的rgb相机采集当前挖掘位置正下方的泥土类型信息,获取泥土的坚固系数和密度,判断是否有大块石头,若存在大块石头无法挖掘,则调整挖土位置,若没有,则进行下一步;
27、步骤7.3:挖掘装置上搭载的湿度传感器判断泥土是雨前还是雨后状态,雨前则湿度w设为1,雨后则湿度w设为0.8;
28、步骤7.4:计算出挖掘装置所用控制力度,机械臂柔和度力度计算公式如下:
29、
30、其中f1是泥土坚固系数常数,其由泥土所属类型决定,w是土壤湿度常系数,取值为0.8和1,当土壤为雨前取值为1,土壤为雨后,取值为0.8,ρ是土壤密度系数,由土壤的的类型决定,单位是kg/m3,d是挖铲的厚度,单位为m,h是铲子深度,单位为m,s为挖铲挖掘的铲面面积,单位为m2,f2是铲子材质硬度系数,由铲子所用材质决定,g为重力系数,取常数9.8n/kg;
31、步骤7.5:获得挖土的机械臂力度值后,采用挖铲上的柔性传感器来获取当前挖铲的施力力度大小,柔性传感器采用的是电阻式传感原理,当物体施加压力时,导电材料的电阻值会随着形变而发生变化,柔性传感器中的导电材料为金属或者导电高分子材料,当物体施加力时,导电材料的电阻值发生变化,通过测量电阻值的变化可以得到物体的压力大小,柔性传感器的形变与压力值之间的转化公式可以根据具体的传感器结构和材料特性而有所不同,转化公式为:f=k*δr。
32、其中,f表示传感器所受的压力值,k为传感器的灵敏度,δr为传感器的电阻变化量,当传感器受到压力时,其内部的电阻值会发生变化,可以通过测量电阻值的变化来计算压力值,通常情况下,k和δr的关系可以通过实验测量来确定;
33、步骤7.6:根据挖铲上柔性传感器反馈的压力值,输入到pid反馈控制算法,pid算法根据当前的误差来调整输出值,以实现对目标值的控制,即挖铲所用力度大小,pid算法通过三个控制器组成,分别比例控制器p根据当前误差的大小,按比例调整输出值,积分控制器i根据误差的积分值来调整输出值,用于消除系统的稳态误差,微分控制器d根据误差的导数来调整输出值,主要用于提高系统的稳定性和响应速度,分别对应了三个控制参数kp,ki和kd;
34、pid控制器在理论上可以完全消除稳态误差,但实际上pid控制器仍然存在一定的稳态误差,稳态误差是指系统在达到稳定状态后,期望输出值与实际输出值之间的偏差,无论持续多长时间,偏差仍然存在,要消除稳态误差,可以使用积分控制,即将积分系数ki设置为一个非零值,将导致控制器在稳态下持续积累误差,并逐渐减小误差,稳态误差的公式为:
35、为了消除稳态误差,需要使稳态误差ess趋近于零,根据pid控制器的公式,可以得到稳态误差的公式为:
36、其中,e(s)是误差的拉普拉斯变换,ti是积分时间常数,t是微分时间常数,为了消除稳态误差,采用公式:其中output是pid控制器的输出,kp是比例常数,用于控制输出与误差的线性关系,ki是积分常数,用于控制输出与误差积分的关系,kd微分常数,用于控制输出与误差微分的关系,error是当前误差,通常为期望值与实际值之差;∫(error)dt是误差的积分,表示误差随时间的累积量,是误差的微分,表示误差随时间的变化率,稳态误差ess趋近于零,从而提高控制系统的稳定性和精度;
37、步骤7.7:为适应不同土质情况机械臂所用的最小最合适的挖力的不同,以及施肥装置在行进过程中电力系统功率在不断减小的情况,为了得到控制机械臂的最佳功率,根据pid控制算法得到的挖铲挖土最小力度,采用电力转换技术,实现在电力系统中提取最大功率的效果,通过不断跟踪电池输出的功率,寻找最佳工作点,实现最大化输出功率,使用一个控制器或转换器来调整电池的输出电压和电流,以使电池的输出功率最大化,控制器通过读取电池的输出电压和电流,并将其与预定的电压和电流进行比较来实现功率点的追踪,一旦最佳工作点被找到,控制器通过调整电池的输出电压和电流来保持在该点附近;
38、求解最大功率点时,需要使用的迭代公式:
39、
40、其中,v(n)当前电池板输出电压,v(n+1)为下一次迭代后的电池板输出电压,为电压关于功率的变化率,δp为当前功率与最大功率之间的差值;
41、控制器计算最大功率点时使用的修正因子公式:
42、
43、其中,v_mpp为最大功率点处的电压,f_v为修正因子,用于校正当前电压和最大功率点电压之间的误差;
44、步骤7.8:根据机械臂柔和度公式计算得到挖铲所需使用的最佳力度以及最小功率后,挖铲开始挖土工作,挖钭张开到最大值,机械臂向下伸展,由红外传感器采集当前挖钭已下挖的深度,若下挖深度达3cm则闭合,机械臂抬起,向左旋转25°,释放泥土,在旋转回原挖土位置,继续挖土工作;
45、步骤7.9:挖土期间,rgb实时采集每次挖掘的变化深度以及判断当前挖土位置是否存在大块石头,若存在大块石头无法挖掘,则调整挖土位置;
46、步骤7.10:红外传感器在挖土期间实时采集当前挖土的深度,若挖掘深度达12cm,则停止向下挖掘,肥料喷洒装置开始工作;
47、步骤7.11:获取当前柑橘树所在位置,与无人机平台采集得到的柑橘地面数字模型对比,获取其生长状况和t度施肥量,向挖好的肥料坑中施放设定肥料;
48、步骤7.12:施肥结束后,机械臂向左旋转25°,将之前挖出的泥土拨回坑中,实现泥土回填,完成一次挖土施肥回填作业。
49、进一步地,柑橘树快速定位控制方法包括如下步骤:
50、步骤5.1:由一侧的深度相机采集当前施肥装置车位置的柑橘树的图像信息;
51、步骤5.2:数据处理装置利用u-net神经网络构建柑橘树冠层分布图像,实现柑橘树冠层与背景的识别和分割出来;
52、步骤5.3:利用kinect相机所获取的深度信息,识别目标的每一个像素,并计算其与施肥及回填装置之间的距离,取距离最短的前100个像素的平均值作为柑橘树冠层的最外端,完成施肥坐标点的确定;
53、步骤5.4:距离d的计算公式如下:
54、其中,β表示相机朝向地面的角度,α表示相机朝向平面的角度,这两个角度可以使用相机的内部参数以及相机的位置和方向来计算。
55、进一步地,叶面肥施放控制方法包括如下步骤:
56、步骤10.1:装置运载车停驻在柑橘树前,深度相机获取柑橘树的冠层信息,数据处理中心根据将所得数据与无人机预飞行获取的柑橘树生长状况信息做比对;
57、步骤10.2:调整升降液压臂的高度,调整可旋转叶面肥施放喷头的角度,将适量的液态肥喷施到柑橘树叶面上。
58、本发明由于采用了上述技术方案,具有以下有益效果:
59、(1)本发明能够适应大多数实际场景下柑橘不同生产时期的施肥工作,利用自动控制技术,以无人机采集生成的柑橘生长状况的数字信息地图依据,可对不同地理环境、不同生长状况的柑橘树,采用最为合适的力度进行挖坑工作,实现能源的高效利用,进行施用最为适合的肥料量,并实现肥料填埋,使肥料得到充分利用,在充分满足柑橘生长所需的同时,进一步提高肥料使用的精确化管理程度,可以实现挖土、肥料施放及回填,极大的减少人力,可实现柑橘树肥料的快速有效精准施放。
60、(2)本发明的机械臂柔和度控制方法可以实现针对不同土质状况采用不同最小力度及最大功率来进行挖土工作,可有效提高能源利用率。
- 还没有人留言评论。精彩留言会获得点赞!