蛏子智能养殖采收设备与装置的制作方法
本发明涉及一种海涂播种养殖采收贝类海产品的设备,属于农业养殖。
背景技术:
1、蛏子,又名缢蛏,是双壳纲帘蛤目贝类动物,属软体动物,生活在海洋之滩涂中,肉嫩而肥,色白味鲜,被称为“西施舌”,为沿海常见的鲜美食材。宁波一带多滩涂,海水咸淡适宜,饵料丰富,土质松软,对养殖蛏子有得天独厚的优势。
2、近年来,海水养殖业得到快速发展,蛏子已成为海涂养殖的主要特色水产,沿海农村经济发展新的增长点。蛏子养殖不与农业争土地,不与畜牧业争饲料,不与鱼虾养殖争水面,是造福人民的新兴技术和资源。大力发展养殖业,不仅满足了市场日益增长的需求,同时缓解大批转产转业的海洋渔业劳动力出路问题,对渔业、渔村及渔民的稳定具有重大的现实意义。但蛏子壳薄易碎,在养殖和采收方式基本上采用的是人工操作,作业环境恶劣,劳动强度大。因此,实现蛏子机械化智能化养殖采收,包括潮间带滩涂底播养殖、滩涂筑坝蓄水养殖、围塘蓄水综合养殖。能进一步发挥海水养殖产业优势,提高海水产品竞争力。
3、随着发展数字渔业提上议事日程,系统地推进渔业数字化建设作为加快推进乡村振兴,实施渔业绿色现代化发展的重要抓手。目前,数字渔业的发展尚处于初级阶段,围绕渔业现代化发展需求和趋势,推进数字技术于渔业生产的深度融合是必然趋势与重要的突破口,发展适合我国海域养殖特点的数字化、智能化养殖装备也是今后科技攻关的重点领域。
4、由于滩涂贝类的捕捞机械需求的迫切性,出现了较多的机械化、半机械化采捕的技术,还见文献报道,但因蛏子生长在洞穴里、穴居深浅不一,还有潮汐原因,成活率、收获率和生产率低下,特别是用于海涂行走采收装置为蛏子养殖技术的主要瓶颈。现有的技术设备都不能满足,尚无适用的滩涂蛏子养殖采捕设备。
5、本发明是一种蛏子机械化智能养殖采收设备与装置,经检索查新了国内外相关采收设备论文和专利,国内外虽然有许多研究和报道。未见涉及与本发明相同的研究与技术。
技术实现思路
1、为了满足人们对蛏子机械化智能养殖采收设备的需求,解决的劳动效率和收获率低的问题,本发明提供了一种机械化蛏子智能播种养殖采收设备与装置。
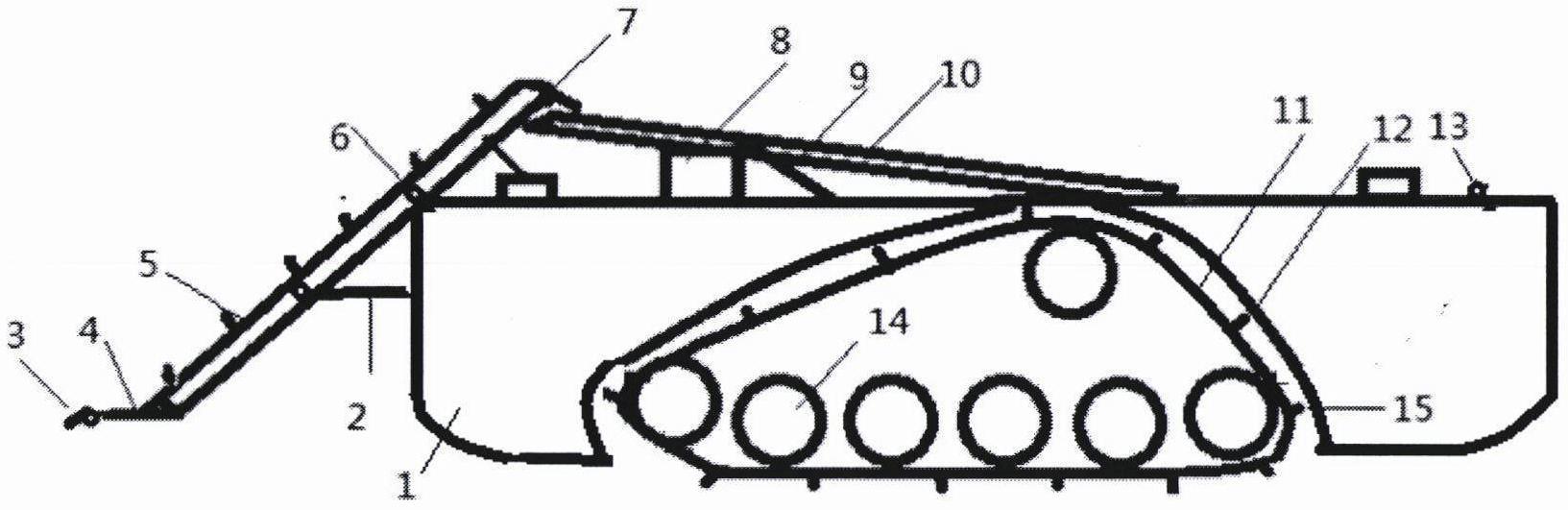
2、本发明的技术方案包括承载体、行走装置、作业设备、蛏塘布置、控制管理系统,其特征在于:
3、a.水、陆、涂三栖行走承载体包括底盘、浮体、行走装置,浮体分敞开船体和密闭浮桶两种,为确保整个设备不倾覆,不沉没,不进水,以设备的总重量设置浮体的排水量,敞开的船体的排水量大于总重量的175%,密闭浮桶的排水量大于总重量的135%,保证浮体至少五分之一在水平面以上,整个设备的重心设置在船沿甲板以下,结合配重保持平衡;底盘两端设有弧形12~25度之间的吃泥接近角,底面平整却开有气槽,避免真空吸力,有利于在滩涂上滑行,底盘和行走装置与涂面的接触面积s应该满足如下要求:
4、
5、s——底盘行走装置与地面的接触面积(cm2)
6、w——设备满载总重量(kg);
7、n——软弱滩涂地基极限承载力(kg/cm2)
8、x——调整系数。(履带取值范围0.10~0.35,仿生轮取值范围0.25~0.50,螺旋滚筒取值范围0.20~0.45);
9、b.行走移动装置包括动力、减速器、缆桩和卷扬机,动力采用排气做净化处理的内燃机或防水防潮的电池电机;多个缆桩布置在码头及陆域岸边,卷扬机和滑轮设置在承载体上,减速器快档速度为:5~16km/h,低档速度为:0.5~3.5km/h;行走装置采用仿生水牛脚腣的叶片轮、设有划水条的履带和充气螺旋滚筒三种形式,采用橡塑、铝合金或不锈钢合成材料;充气螺旋滚筒是浮体与行走装置的结合;
10、c.作业设备包括采收器、播撒机、翻耕机、底层铺设机和臭氧发生器,并在行走承载体上设置链接耳与升降机构;采收器包括装有识别感应器和底部设有滚杆的铲斗、有弹性材质的l型铲头、输送带、蛏泥分离器、智能拣选装置和坏死破碎蛏剔除装置;播撒机包括播种器、撒料器及播撒密度调整装置;翻耕机包括翻耕犁和耙平犁,使蛏涂平整、均匀、松软;底层铺设机设有隔离膜滚筒,在翻耕机翻起涂泥时,隔离膜铺设,涂泥经由铲斗、输送带覆盖于隔离膜上;以gps定位导航系统按工控电脑中设置的时间路线进行翻耕、铺设、播种、撒料与采收,并在屏幕上显示和记录;臭氧发生器一边在塘内水域移动,一边把空气臭氧压入水中;
11、d.蛏塘分为水陆涂三个区域,水域用于养殖鱼虾类水生物包括蛏涂间一条一条水道、蛏塘四周开有护岸河,并与闸门码头联通,水循环无死角;陆域布置四周进出口及下水斜坡道路,带有缆桩吊机的浮码头,码头上设有电永磁接头的充电桩,带有滤网的闸门,带有工控电脑的基站;涂域是蛏田用于养殖蛏子或贝螺类生物,经翻涂、耙土、平整,3m~7m宽一垄一垄呈马路形,中部高旁边低,不易积水,垄之间留有水沟,面积约为总面积的1/3~2/5,顶面高度低于陆域,水位高时淹没,水位低时露出,底层铺设隔离层;闸门控制水位,定期换水,周期性地让水位高于涂域和低于涂域;
12、e.控制管理系统有定位导航、智能遥控、人机交互和管理监测组成,定位导航包括行走承载体首尾设有的天线和信号发射台、gps定位导航仪和基站;智能遥控包括自动感应器、遥控器和接收器的行走工作执行模块,管理监测包括含盐量、含氧量,ph值、气温、水深、养殖物密度的智能监测模块;控制管理系统的电源为电池组,行走承载体顶部设有太阳能电池板及码头设有电永磁接头的充电桩为电池组获取电能并进行存储。
13、所述的承载力是指涂面地基承担上部承载体荷载的能力,是涂面地基土抗剪强度的一种宏观表现。就是涂面地基不会发生变形的最大容许荷载力,不能超过地基承载力的特征值。在荷载作用下,地基要产生变形。随着荷载的增大,地基变形逐渐增大,初始阶段地基尚处在弹性平衡状态,具有安全承载能力。当荷载增大到涂面地基中开始出现某点,或某一截面上的剪应力达到土的抗剪强度时,该点或小区域内各点就剪切破坏而处在极限平衡状态,土中应力将发生重分布。这种小范围的剪切破坏区,即为塑性区。地基小范围的极限平衡状态大都可以恢复到弹性平衡状态,地基尚能趋于稳定,仍具有安全的承载能力。但地基变形稍大,变形超过允许值,地基出现较大范围的塑性区时,将显示地基承载力不足,设备陷入泥涂中。为了行走承载体在水上、滩涂、陆上都能行走自如。基于滩涂上承载力低,容易陷进去,地基极限承载力是指地基稳定被破坏前的最大承载能力。本装置采用仿生水牛脚腣的叶片轮、设有划水条的履带和充气螺旋滚筒三种形式行走系统,底部接触面的可以随着整个机器的重量设置。从而解决滩涂行走过程中阻力大、下陷、行走效率低的问题,为滩面翻耕、机械化采捕装备提供承载行走系统;所述的底盘即承载体的底部设有弧形的吃泥接近角,根据东南沿海滩涂表面有一层浮泥的特点,在测量滩涂表面承载力时剔除表面浮泥层,接近角设置为10~18度之间。底面平整却设有气槽,有利于在滩涂上滑行及避免船底盘的真空吸力。
14、所述的履带根据滩涂地基的承载力设置履带的接触地面积,行走装置浮体驱动机构。履带采用三角形布置,每节设有划水条,起码3/7的履带露在水线之上,履带面积及边缘上设置划水条,解决水面滩涂行走与下陷的问题。
15、所述的仿生水牛脚腣的叶片轮,仿生轮采用构建叶片的三维几何形状结合表面涂层技术降低叶片行走的阻力,提升叶片行走的推力。基于拓扑优化技术设计叶轮排布。基于仿生学理论,以仿生水牛脚腣的叶片,具有良好松软地面行走能力的动物作为研究对象,采用逆向工程技术构建叶片的三维几何形状结合表面涂层技术降低叶片行走的阻力,提升叶片轮行走的推力。
16、所述的充气螺旋滚筒是浮体与行走装置相结合,由于承载体大部分时间在水面与滩涂上行走,采用中空充气滚筒外设螺旋叶片,解决滩涂行走过程中阻力大、行走效率低的问题,从而为滩面翻耕、机械化采捕装备提供三栖行走承载系统。实现“陆上能跑、滩涂能行、水上能航”的目标,是机械化智能养殖采收设备的关键技术
17、所述的缆桩布置在码头及陆域岸边四周,承载体上设有锚机与滑轮,锚缆采用涂锌钢丝绳,让承载体的锚缆挂于岸边的缆桩,以控制驱动卷扬机来实现定位或移动。
18、所述的浮体可以敞开式和密封式的两种,浮体根据设备的总重量设置浮体的排水量。敞开的浮体就相当于是一个船体,整个设备的重心设置在甲板以下。密闭的浮体,设备的重心设置在浮体的中心线的以下。确保整个设备稳定,不倾覆,不下沉没,不进水。
19、所述的动力机构采用内燃机或电机两种方式,动力采用排气做净化处理的内燃机提供行走装置以及采收器、播种机、翻耕机的动力。尽管如此为控制管理系统的电源为电池组。考虑到长期在露天作业,设备的顶上设置一层太阳能电池板,以挡雨水的侵入和利用太阳能对电池进行充电。行走承载体顶部设有太阳能电池板及码头设有电永磁接头的充电桩为电池组获取电能并进行存储。为了避免液压系统渗漏,造成油品对渔场的污染,影响养殖品质,对内燃机排气做净化处理,亦是采用防水防潮的电池电机作为动力的优点。
20、所述的采收器包括采捕和拣选。采收器有铲斗、输送带,拣选有蛏泥分离器、智能拣选装置和坏死破碎蛏剔除装置;
21、所述的铲斗位于采捕装置的前端与输送链连接,l型铲头采用橡胶塑料有弹性的材质的,通过试验研究铲头的各参数,通过模拟分析确定铲头的最优参数为水平面向下3~12度之间,以免损伤蛏子;铲斗中装有姿态感应器和识别感应器。识别感应器采用地探仪,对地层的密度进行探测,显示均密度的为泥层。显示为不同质密度的是蛏之所在的地方。铲斗中装有铲斗姿态感应器,始终保持铲斗最佳位置与姿态,后部装有潜水振动器,在铲斗的底部设有滚杆,以引导铲斗沿着底层隔离层行进,保护及平整铺底膜层。铲斗末端连接输送带,输送带上等距离装有反耙犁,把含蛏的泥输送到蛏泥分离器。另外铲斗的宽度大于行走装置,使得作业边缘互相重叠,不遗漏,不浪费,无死角。
22、所述的拣选装置有蛏泥分离器、智能拣选和坏死破碎蛏剔除装置;包括滩泥和蛏子分筛装置、拣选装置和高效无损品质检测系统。所述的采收反耙犁,采收犁安装在犁箱体的前端;主传送带沿着采收犁箱体的倾斜方向向上传输;用于切分滩泥的切泥齿,安装在所述采收犁箱体的内侧,实现了铲挖、筛拣、收集连续机械化作业。
23、所述镂空设计的输送带是蛏泥分离器的前移,输送带与蛏泥分离器的有机结合,把输送带和反耙犁都以小于蛏子的尺寸镂空,在输送过程中配以振动器,泥水回到滩涂,蛏子被捞起,在输送过程中直接完成蛏泥的分离。
24、所述的翻耕装置,为了不影响蛏子的产量和品质,充分考虑滩面泥沙的性能,经过一轮养殖后,蛏田需要经过翻涂、耙土、平整后才可继续养殖,因此需要采用杆组机构实现翻耕深度的控制,建立翻耕装置的设计模型,采用有限元方法对其运动特性进行分析,考虑整个设备的运行阻力、一次最大翻耕深度和可采捕宽度,保证其在滩涂的环境下实现泥沙混合的翻耕效率、翻耕深度和平整。根据浙江沿海滩涂,在潮汐、海浪等动力作用下,滩涂剖面呈二元结构。因此蛏田的最下面铺设沙子和隔离层、为粉砂层,以粉砂、细砂为主,泥质含量较低,结构较上层紧密,含水量也较低,中间层要选用1/9~1/4混合的泥沙,最表层要覆盖无沙软泥,为淤泥层,沉积物颗粒细小,以泥质为主,含少量细砂、粉砂,含水率高,结构松散,表层与隔离层之间厚度在20cm~50cm之间;而平时养殖的滩涂贝类均多数生活在上层淤泥层中。滩涂贝类的生活环境决定了采捕时首先需要解决贝类如何从滩涂中采集、传输和高效分离等技术问题。其次,不同贝类生活的泥层深度的不同,蛏子生活在泥下30cm~50cm的位置,青蛤、文蛤等则生活在泥深10cm~30cm的区域,因此,需要调整翻耕深度及不同泥层采集时的设备适应性问题。
25、所述的定位深度控制器,包括作业平台头尾两个定位天线,深度监测器和信号传输天线,控制房的定位系统、信号发射接收器,工控电脑,。同质贝类养殖具有相同的深度,不同季节的贝类所处深度不同。在采收过程中,需要装置到滩面下一定深度采捕、减少采捕机前进时阻力、将养殖层的贝类全数采收。
26、由于不同的滩涂贝类所生长区域不同,故需探测位置调整采捕深度。通过三维模型滩涂层、水、行走机械三者位置,构建出采捕装置在不同角度时,采捕机构进入水中可能出现的问题、阻力的大小及对滩涂采收的影响。通过仿真分析,确定并控制深度。
27、所述的苗种来源主要依靠采捕野生苗和海区半人工采苗。根据季节的不同,需要分筛大小的苗种,然后再经过苗种培育,最后再进行播种养殖。在苗种采捕和培育过程中要多次进行苗种分筛,提高苗种培育成活率,因此苗种分筛需要考虑不同苗种,对播撒分布、播撒效率、播撒均匀度的影响规律,对装置进行优化,最终获得播苗装置。
28、所述的控制室带有工控电脑的基站;定位系统结合所构建的物联网操控系统,在工控电脑上实时记录了包括含盐量、含氧量,气温、面积、水深、养殖物密度以及翻耕、播苗、采收的数量、时间、位置等信息。
29、行走承载体顶部设有太阳能电池板及码头设有电永磁接头的充电桩为电池组获取电能并进行存储。
30、为实现耕、种、管、收四类设备的工作状态监测,滩面翻耕机、采捕机的智能操控,机械运动控制模块、运转检测模块、导航模块、通信模块等核心器件,并与设备整合。为智能渔业数据平台及滩涂贝类养殖孪生系统提供数据支撑。
31、通过采用上述技术方案,本发明有以下积极效果
32、1、由于成功制作水、陆、滩涂三栖行走装置,通过滩涂地基极限承载力的测试,浮体的配置,重心的设置,底盘两端弧形吃泥接近角及气槽设置,采用了履带、仿生轮和螺旋滚筒三种形式,开发了含有浮体、动力、转向机构、减速器的水陆涂三栖的行走机构;解决了在水、陆、涂上行动自如的难题。
33、2、由于养殖过程中把滩面翻耕机、苗种分筛机、播种机和采捕机等工作机器装在行走机构上,实现滩涂蛏子养殖全生命周期中的耕、种、管、收的机械化数字化作业。
34、3、由于基于时空多源信息感知的采捕深度自适应控制技术,开发与手机电脑兼容性强的远程数据传输、远程操控等功能的装备控制系统。装有自动感应遥控系统,船体gps定位系统。解决了信息采集、数字存储,具有行走控制、运动控制、智能往返的功能。实现无人驾驶,提升面向信息化、数字化、智能化的智慧农业发展水平。
35、总之,本发明根据海洋滩涂及蛏的特点,研制开发了三栖的行走机、滩面翻耕机、苗种分筛机、播种机和采捕机,实现滩涂养殖全生命周期中的智能化作业,具有自动化、机械化、数字化的特点,适合于滩涂缢蛏养殖。
- 还没有人留言评论。精彩留言会获得点赞!