土壤元素检测和除草多功能机器人的制作方法
本发明涉及农业设备,尤其涉及一种土壤元素检测和除草多功能机器人。
背景技术:
1、近年来,劳动力不足已经成为农业领域的一大问题,每年都需要大量劳动力在田间施肥、除草,智能农业机器人代替人工已成为趋势。农业机器人是未来农业生产的重要工具,目前,农田现场作业的机器人需求呈现爆发式增长,土壤元素检测以及除草是两个重要的发展方向。
2、自主除草机,尤其是激光除草机的使用,采用机器人技术、图像特征提取和激光技术相结合,有效、安全地穿越农田,不使用除草剂,不伤害土壤和水的情况下除草,作为新兴的除草方式逐渐受到关注。
3、土壤元素检测,尤其是养分元素检测在合理利用土壤,高效发展农业方面发挥着积极作用,土壤养分的测量和控制对农产品的合理施肥尤为重要。常规的土壤养分检测方法主要还是传统的化学分析法,化学分析方法的成本较高,周期较长,还容易产生污染问题,不适应大范围推广。土壤检测机器人目前有两个主流技术路线,一个是采用近红外光谱技术,另一个是激光诱导击穿光谱技术(laserinducedbreakdownspectroscopy,简称libs)。近红外光谱技术不需要化学试剂,可以实现多个指标的同时测量。libs技术具有无需进行复杂样品预处理、多元素同时分析、可对固态、液态、气态样品进行测量、可实现无接触实时在线分析等优势,自从激光器发明以来,libs技术被广泛应用于工业、考古分析、土壤检测,生物医学和食品安全等领域。
4、近红外光谱检测方法虽然不需要化学试剂,但其化学计量学模型建立较为复杂,受土壤类型、水分、土壤颗粒大小等影响大,并且对中量和微量元素检测的效果很差,不适用于中量和微量元素的检测。
5、激光诱导击穿光谱在测量土壤样本过程中需要激光对土壤进行击穿以获得等离子态光谱,libs的光斑只有微米级大小,且需要高度的聚焦,焦点变化范围也是在微米级,这对此技术在非平整表面(比如自然状态土壤)的应用产生了较大限制,同时对测量对象的颗粒度和纯净度也有较高的要求,比如农田土壤,颗粒度太大,不容易对焦,且测量点不具有代表性,如果土壤中杂草、叶片、草籽等杂质太多,也容易对测量造成颠覆性的影响。
6、现有发明中,发明cn105403542a提供了一种便携式土壤养分检测系统和方法,需要人工采集土壤及对焦,无法处理土壤飞溅造成的测量误差;
7、发明cn104198445a提供了一种可移动的激光击穿光谱检测土壤成分的装置,可以在田间移动检测,不需要采集,但不能改变土壤检测深度,忽略了田间土壤不平整,土壤颗粒不均匀的问题;
8、发明cn106290309a提供了一种便携式可变深度土壤重金属含量检测装置,只能检测土壤中的重金属,不能检测土壤养分元素,可以检测不同深度的土壤,不需要对土壤进行采集,但忽略了检测需要对焦的问题,同时存在由于土壤样本表面颗粒不均匀、激光作用在土壤上容易造成飞溅,造成光谱测量的不稳定问题。因此,以上方法都无法实现无人干预的农田土壤元素现场快速高精度机器自主测量,特别是农田土壤环境复杂,含水量、颗粒度、杂质等都会造成影响。
9、同时,随着科技农业的发展,近年来构建土壤养分地图成为土壤学的一大热点,对大范围土壤养分检测的需求日益迫切,能够解决以上问题,利用激光诱导击穿光谱快速、实时检测土壤养分的技术显得越来越重要。
10、激光除草也是一个重要的方向,此技术需要一个大功率的激光器,需要对光路进行调整,需要识别杂草并聚焦后烧蚀,此光学结构与libs的激光激发光路结构相近,可以与检测系统复用,实现对检测系统功能扩展,节省成本的目的。
11、为克服背景技术领域中现有土壤元素检测技术存在测量不稳定、测量误差大、人工费时费力、难以完成土壤养分地图构建,以及现有除草机功能单一的问题。针对上述出现的问题,目前尚未提出有效的解决方案。
技术实现思路
1、发明目的:提供一种土壤元素检测和除草多功能机器人,以解决现有技术存在的上述问题。
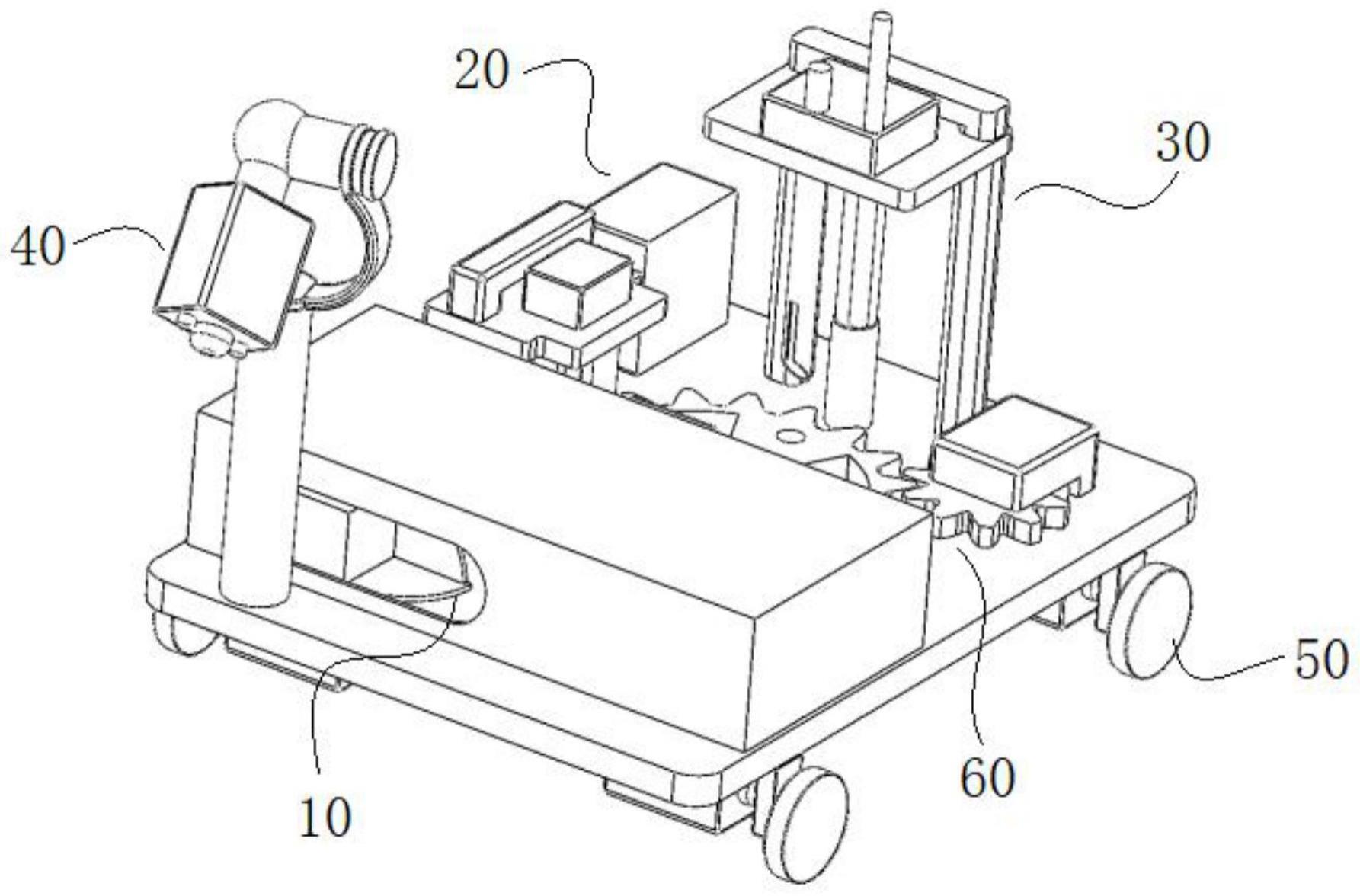
2、技术方案:土壤元素检测和除草多功能机器人,包括:设备主体,所述设备主体的顶部中心处设置有轮转模块,所述轮转模块的四周分别设置有主控模块、检测模块、压片模块、取土模块和激光除草模块,所述设备主体的底部设置有四轮驱动载体;
3、所述主控模块分别与所述轮转模块、所述检测模块、所述压片模块、所述取土模块、所述激光除草模块和所述四轮驱动载体电连接;
4、通过所述主控模块接收和/或发出控制信号,分别控制所述轮转模块、所述检测模块、所述压片模块、所述取土模块、所述激光除草模块和所述四轮驱动载体运行和时间调度;
5、所述轮转模块,用于放置样品或清理土壤;
6、所述检测模块,用于收集待测土壤被激光器发射的激光照射时产生的等离子态的光学信号,并根据所述光学信号,产生特征光谱信号,并将所述特征光谱信号转换为数字信号传输至所述主控模块;
7、所述压片模块,用于压制土壤压片;
8、所述取土模块,用于提取预设深度的土壤和清理压片槽中的土壤;
9、所述激光除草模块,用于激光除草。
10、作为优选,所述主控模块包括:控制单元、数据计算处理单元、图像处理单元和数据通讯单元,所述控制单元分别与所述数据计算处理单元、所述图像处理单元和所述数据通讯单元电连接;
11、所述数据计算处理单元,用于对检测模块采集到的光谱数据进行计算处理,获取待测土壤中各种元素对应的光谱强度信号,根据所述光谱的强度信号,计算出待测土壤中各元素的含量;
12、所述图像处理单元,用于分析田间的实时图像信息,使用特征提取算法识别杂草并获取杂草的坐标,使用坐标控制激光振镜将激光照射在该坐标上;
13、数据通讯单元,用于定位和无线数据的传输。
14、作为优选,所述轮转模块包括:水平设置于所述设备主体顶部的步进电机,所述步进电机的输出端通过齿轮与转轮啮齿连接;
15、其中,所述转轮为轮辐式齿轮,所述轮辐式齿轮的轮辐之间间隔设置有开孔,以及,第一轮辐上设置有贯穿第一取土孔,第二轮辐上设置有压片凹槽和清理槽,所述压片凹槽用于承接土壤进行压片,所述清理槽呈圆弧形沿圆周方向贯穿整个第二轮辐,用于清理土壤,第三轮辐上设置有与所述压片凹槽相同的标定凹槽,用于放置标定样本,所述压片凹槽、标定凹槽和所述清理槽均设置在同一圆周上。
16、作为优选,所述检测模块包括:用于发射预设波长激光的激光器,将所述激光经过分光片后,分别发送至所述压片凹槽和激光振镜;与所述激光器相对设置的分光片,用于将激光器发出的光束按照不同比例分光;与所述分光片相邻设置的光谱收集转换器,用于收集待测土壤被所述激光器发射的激光照射时产生的等离子态的光学信号,并进行信号转换。
17、作为优选,所述激光器为高功率激光器,所述激光器为输出50瓦的半导体泵浦调q固体激光器,输出波长为1064nm;所述分光片为90:10分光片,透过为90%,反射为10%。
18、作为优选,所述压片模块包括:第一液压缸、液压控制器、上垫杆、第一滑动支柱和第一活动横梁,所述第一液压缸与所述第一液压控制器电连接,所述第一滑动支柱和第一液压缸分别设置在所述设备主体上,所述第一活动横梁设置在所述第一滑动支柱上,并与所述第一液压缸刚性连接,通过所述第一液压缸的伸缩带动所述第一活动横梁在所述第一滑动支架上做上下运动;所述第一液压控制器用于控制第一液压缸伸缩;所述上垫杆设置在第一活动横梁下方;
19、当在转轮上的压片槽放入土壤,并转动至上垫杆下方时,随着第一活动横梁压缩压片凹槽中的土壤制作土壤压片。
20、作为优选,所述取土模块包括:第二液压缸、第二滑动支柱、第二活动横梁和取土器,所述第二滑动支柱和第二液压缸分别设置在所述设备主体上,所述第二活动横梁设置在第二滑动支柱上并与所述第二液压缸连接,通过第二液压缸伸缩带动所述第二活动横梁在第二滑动支架上做上下运动;所述第二液压缸与液压控制器电连接;所述取土器设置于所述第二活动横梁下方;所述设备主体在所述取土器下方设置与所述轮转模块的第一轮辐上相重合的第二取土孔,用于上方取土器的穿过和固定取土器的方向;
21、当在转轮上的第一取土孔转动到取土器下方时,随着所述第二活动横梁的下移,取土器压入土壤取土。
22、作为优选,所述取土模块还包括:第一螺杆、第二螺杆和螺杆控制器,所述第一螺杆和第二螺杆与所述螺杆控制器电连接,所述取土器中空且内部设置第一螺杆,用于在取土器取出土壤后通过螺杆转动推挤将取土器内的土壤推出;所述第二螺杆设置在所述第二活动横梁上;在第二取土孔两侧开设有漏土开孔,用于将取土器取出的多余土壤和压片凹槽中推出的土壤从漏土开孔处排出至地面;
23、当在所述转轮上的清理槽转动至所述第二螺杆下方时,所述第二螺杆伸出至所述清理槽,随着所述转轮的转动,将所述压片凹槽中的土壤压片推出,土壤经所述转轮和所述设备主体上的漏土开孔漏至地面。
24、作为优选,所述激光除草模块包括:设置于所述设备主体上表面的电动云台,用于安装固定图像采集摄像头,所述电动云台的顶部设置有图像采集摄像头,用于实时采集田间图像信息;与所述电动云台相邻设置的激光振镜,用于控制激光束的角度偏转;设置在摄像头上的补光灯,用于在光线较差的环境下为图像采集摄像头提供充足的光照。
25、作为优选,所述四轮驱动载体包括:设置于所述设备主体底部的四个直流无刷电机和驱动轮,所述直流无刷电机与所述驱动轮相连,通过所述直流无刷电机驱动四个驱动轮带动设备主体运动。
26、有益效果:在本技术实施例中,采用在自动除草的过程中完成土壤元素检测的方式,通过所述主控模块接收和/或发出控制信号,分别控制所述轮转模块、所述检测模块、所述压片模块、所述取土模块、所述激光除草模块和所述四轮驱动载体运行和时间调度,达到了同时具备土壤元素检测和除草功能的目的,从而实现了在自动除草的过程中同时完成土壤元素含量的检测,进而实现了土壤养分数据的快速、连续、动态检测,形成土壤养分地图,使土壤养分的大范围、实时、连续测量更加简单,省时省力的技术效果,进而解决了现有土壤元素检测技术存在测量不稳定、测量误差大、人工费时费力、难以完成土壤养分地图构建,以及现有除草机功能单一的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!