智能施肥装置及其控制方法
本发明涉及农业智能装备,尤其涉及一种智能施肥装置及其控制方法。
背景技术:
1、施用化肥是农作物种植管理的重要环节之一,施用化肥是实现农业高产、高效与粮食安全的重要保证。但是过量施用化肥会导致成本增加、土壤板结、水体富营养化等环境问题,施肥不足会造成减产。而影响施肥质量的主要因素就是施肥技术与机械。目前主流施肥播种机的施肥方式是通过地轮驱动排肥轴进行施肥,施肥播种机的施肥部分主要由驱动地轮、传动链、施肥量调节链轮组、排肥轴、肥箱组成。当进行施肥播种作业时,驱动地轮转动,通过链轮传动的方式驱动排肥轴,从而带动排肥槽轮进行排肥作业。其中,链轮传动系统中间设置了两个链轮组,装有不同直径和齿数的链轮,通过链条匹配两个链轮组不同的链轮可以实现施肥量调节。
2、但是,现有农作物施肥播种机的施肥动力主要来自地轮驱动,机械机构复杂,施肥稳定性差,容易出现因地轮打滑造成施肥量不一致。而且现有施肥播种机施肥量的调节主要依靠更换不同的齿轮组对,通过改变地轮与排肥轴的转速比来实现排肥量的调节,不易操作,施肥量不能精准调控。
3、因此,有必要提供一种新的技术方案以解决上述技术问题。
技术实现思路
1、本发明提供一种智能施肥装置及其控制方法,用以解决现有施肥播种机容易出现施肥量不一致,以及施肥量不能精准调控的问题。
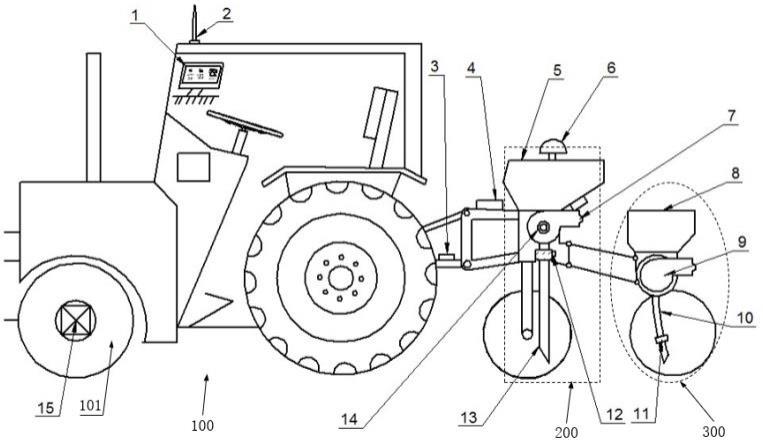
2、本发明提供一种智能施肥装置,用于搭载在施肥作业机组上,所述施肥作业机组包括牵引机构和施肥机构,所述施肥机构包括用于排肥的排肥轴,所述牵引机构包括用于驱动所述施肥作业机组行进的地轮,所述智能施肥装置包括施肥控制器以及与所述施肥控制器电性连接的排肥驱动器、作业状态传感器、卫星定位测速传感器以及地轮转速传感器;
3、其中,所述作业状态传感器设置在所述牵引机构的牵引部,用于检测所述施肥机构的作业状态,并将所述作业状态发送至所述施肥控制器;
4、所述排肥驱动器的输出轴与所述排肥轴相连接,用于驱动所述排肥轴转动以进行排肥作业;
5、所述卫星定位测速传感器设置在所述施肥作业机组上,用于检测所述施肥作业机组的位置和作业速度,并将检测到的所述施肥作业机组的位置和作业速度发送至所述施肥控制器;
6、所述地轮转速传感器设置在所述地轮上,用于检测所述地轮的转速并根据所述地轮的转速解析所述施肥作业机组的作业速度,并将检测到的所述施肥作业机组的作业速度发送至所述施肥控制器;
7、当所述施肥机构处于施肥作业状态,并且所述地轮转速传感器检测的施肥作业机组的作业速度大于0时,所述施肥控制器根据所述卫星定位测速传感器检测的施肥作业机组的作业速度来确定基准作业速度,并根据所述基准作业速度和目标施肥量控制所述排肥驱动器的转速,其中,所述基准作业速度为所述地轮转速传感器检测的施肥作业机组的作业速度和所述卫星定位测速传感器检测的施肥作业机组的作业速度中的一者。
8、本发明还提供一种如上所述的智能施肥装置的控制方法,包括以下步骤:
9、步骤s1,施肥作业时,所述施肥控制器接收所述作业状态传感器检测的所述施肥机构的作业状态,并判断所述施肥机构是否处于施肥作业状态,若是,则执行步骤s2,否则执行步骤s4;
10、步骤s2,所述施肥控制器接收所述地轮转速传感器解析的所述施肥作业机组的作业速度,并判断所述地轮转速传感器解析的所述作业速度是否大于0,若是,则执行步骤s3,否则执行步骤s4;
11、步骤s3,所述施肥控制器接收所述卫星定位测速传感器检测的施肥作业机组的作业速度,根据所述卫星定位测速传感器检测的施肥作业机组的作业速度确定基准作业速度,并根据所述基准作业速度和目标施肥量控制所述排肥驱动器的转速;
12、步骤s4,所述施肥控制器控制所述排肥驱动器停止转动。
13、本发明的上述技术方案具有以下有益效果:
14、本发明的智能施肥装置及其控制方法,通过在施肥作业机组上设置施肥控制器以及与施肥控制器电性连接的排肥驱动器、作业状态传感器、卫星定位测速传感器和地轮转速传感器,当作业状态传感器检测的施肥机构为施肥作业状态,并且地轮转速传感器检测的施肥作业机组的作业速度大于0时,施肥控制器根据卫星定位测速传感器检测的施肥作业机组的作业速度来确定基准作业速度,其中基准作业速度为地轮转速传感器检测的施肥作业机组的作业速度或者卫星定位测速传感器检测的施肥作业机组的作业速度,施肥控制器根据基准作业速度和目标施肥量控制排肥驱动器的转速,从而实现了施肥作业全程施肥量的精准调控,避免了因地轮打滑而造成施肥量不一致的现象。
技术特征:
1.一种智能施肥装置,用于搭载在施肥作业机组上,所述施肥作业机组包括牵引机构和施肥机构,所述施肥机构包括用于排肥的排肥轴,所述牵引机构包括用于驱动所述施肥作业机组行进的地轮,其特征在于,所述智能施肥装置包括施肥控制器以及与所述施肥控制器电性连接的排肥驱动器、作业状态传感器、卫星定位测速传感器以及地轮转速传感器;
2.根据权利要求1所述的智能施肥装置,其特征在于,当所述施肥机构处于施肥作业状态、且所述地轮转速传感器检测的施肥作业机组的作业速度大于0以及所述卫星定位测速传感器检测的施肥作业机组的作业速度小于预设阈值时,所述施肥控制器以所述地轮转速传感器检测的作业速度作为所述基准作业速度;
3.根据权利要求1或2所述的智能施肥装置,其特征在于,当所述施肥机构处于施肥作业状态,且所述地轮转速传感器检测的施肥作业机组的作业速度等于0时,所述施肥控制器控制所述排肥驱动器停止转动;
4.根据权利要求2所述的智能施肥装置,其特征在于,所述施肥机构还包括导肥管,所述智能施肥装置还包括施肥量传感器和第一转速传感器,所述施肥量传感器和所述第一转速传感器均与所述施肥控制器电性连接;
5.根据权利要求4所述的智能施肥装置,其特征在于,所述施肥作业机组上还搭载有播种机构,所述播种机构包括导种管、播种传感器、排种驱动器以及排种轴;
6.根据权利要求5所述的智能施肥装置,其特征在于,所述智能施肥装置还包括第二转速传感器,所述第二转速传感器设置在所述排种驱动器的输出轴上并与所述施肥控制器电性连接,所述第二转速传感器用于检测所述排种驱动器的转速,并将所述排种驱动器的转速发送至所述施肥控制器;
7.一种如权利要求1-6任一项所述的智能施肥装置的控制方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的智能施肥装置的控制方法,其特征在于,在所述步骤s3中,所述施肥控制器接收所述卫星定位测速传感器检测的施肥作业机组的作业速度,并根据所述卫星定位测速传感器检测的施肥作业机组的作业速度确定基准作业速度的步骤包括:
9.根据权利要求8所述的智能施肥装置的控制方法,其特征在于,在所述步骤s3之后,所述控制方法还包括以下步骤:
10.根据权利要求9所述的智能施肥装置的控制方法,其特征在于,在所述步骤s3之后,所述控制方法还包括以下步骤:
技术总结
本发明涉及农业智能装备技术领域,提供一种智能施肥装置及其控制方法,可用于施肥作业机组上,包括施肥控制器以及与施肥控制器电性连接的排肥驱动器、作业状态传感器、卫星定位测速传感器和地轮转速传感器;施肥作业机组包括地轮和施肥机构,作业状态传感器用于检测施肥机构的作业状态,排肥驱动器用于驱动排肥轴转动,卫星定位测速传感器用于检测施肥作业机组的作业速度,地轮转速传感器用于检测地轮的转速并根据地轮的转速解析施肥作业机组的作业速度;施肥控制器可根据施肥机构的作业状态、地轮转速传感器检测的施肥作业机组的作业速度以及卫星定位测速传感器检测的施肥作业机组的作业速度制定相应的施肥策略,以精准调控施肥量。
技术研发人员:董建军,罗长海,颜丙新,孟志军,李立伟,武广伟,王培,魏学礼,丛岳,尚业华
受保护的技术使用者:北京市农林科学院智能装备技术研究中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!