一种通过球形包络和咬合断柄的柑橘末端采摘手
本发明涉及一种农林机械,具体是通过球形包络和咬合断柄的柑橘末端采摘手。
背景技术:
1、一般的果蔬采摘依靠夹持果实旋转、掰折的方法进行采摘;而柑橘由于其具有木质柄的特性,无法通过上述方法采摘,因此成为自动化采摘中的难点之一。并且柑橘树枝干较多,已有的柑橘采摘手多为剪刀置于加持机构上端,这种结构在采摘过程中扰动较大,容易对柑橘造成损伤,对视觉伺服定位的要求较高。
技术实现思路
1、本发明的目的是克服上述背景技术的不足,提供一种通过球形包络和咬合断柄的柑橘末端采摘手;该采摘手应具有使用方便、工作效率高、结构紧凑以及制造成本低的特点。
2、本发明提供的技术方案是:
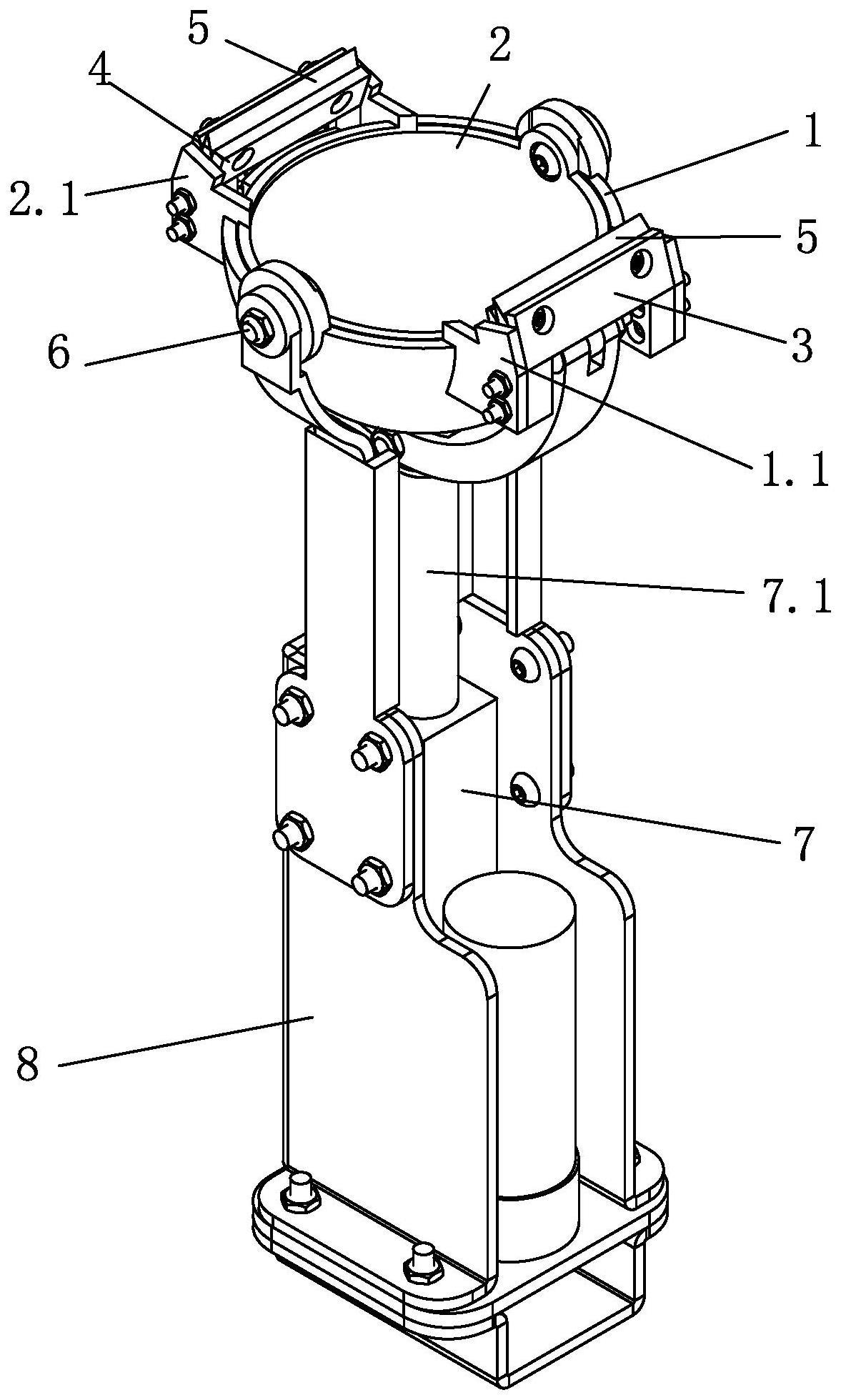
3、一种通过球形包络和咬合断柄的柑橘采摘手,包括刀片;其特征在于:该柑橘采摘手还包括安装在支架上且可进行球形包络转动的两个半球壳、通过刀片调节件分别安装于两个半球壳的侧边以进行对应剪切配合的两个刀片以及安装在支架上且通过两个弧形连杆分别驱动两个半球壳进行剪切运动的电推杆。
4、所述两个半球壳通过穿过各自球心且同轴布置的两个铰轴可转动地定位在两侧支架上。
5、两个半球壳为半径不同以避免发生运动干涉的内半球壳和外半球壳;两个半球壳一侧边沿的赤道部位分别制作有突出于球面且制作有铰接孔的连杆接头,两个半球壳另一侧边沿分别制作有突出于球面安装所述刀片用的刀片座。
6、所述外半球壳上开设有与连杆接头相适合的通槽,该通槽沿着外半球壳的赤道布置但与外半球壳的边沿保持距离;所述内半球壳上的内半球壳连杆接头可活动地插入所述的通槽,且其上的铰接孔至内半球壳球心的距离与外半球壳连杆接头上的铰接孔至外半球壳球心的距离相等。
7、所述两个弧形连杆的一端共同与电推杆上的伸缩杆铰接,两个弧形连杆的另一端分别与所述的内半球壳连杆接头以及外半球壳连杆接头铰接。
8、所述刀片调节件为将刀片固定在刀片安装座上的刀片架。
9、所述外半球壳上靠近连接头两侧开设有与内半球壳连杆接头对应配合的缺口,以防止工作时内半球壳刀片安装座与外半球壳发生干涉。
10、本发明的有益效果是:
11、(1)本发明通过内外半球壳转动合拢实行球形包络。当进行抓取作业时,内外半球壳闭合,内部会形成一个球形空腔,并且该空腔可以刚好包络柑橘果实,这样不仅能够增大与果实间的接触面积,还能够保证夹持效果,保证抓取成功率,并且对于不规则物体能够有很好的包容性。同时在采摘过程中,柑橘处于空腔内,隔绝外界的枝条,防止枝条对柑橘造成损伤。
12、(2)本发明的刀片安装在内外半球壳上,模仿动物牙齿咬合的方式实现对柑橘果柄的断柄,使得结构更加紧凑;并且由于咬合时柑橘处于球形空腔内,果柄位置大致已经确定在刀片附近,大大提高了断柄的成功率,减轻了对于果柄视觉定位的精度要求。进一步的,设计了刀片和刀片架的调整孔位,能提高切割精度,方便针对不同直径果柄的剪切要求,完成采摘任务。
13、(3)本发明通过电推杆的伸缩实现采摘手的闭合,提供了剪切时所需的负载。同时只有这一个动力源,控制方便。本发明安装在采摘机器人机械臂的末端,不仅保证了抓取果实的成功率,而且降低了果实收获的损坏率和保证了末端执行器工作的安全性,同时还具有结构巧妙、整体尺寸紧凑、制造成本低、运行平稳、工作效率高且经济效益好的特点,可以普遍应用于农业智能采摘机器人等领域。
技术特征:
1.一种通过球形包络和咬合断柄的柑橘采摘手,包括刀片(5);其特征在于:该柑橘采摘手还包括安装在支架(8)上且可进行球形包络转动的两个半球壳、通过刀片调节件分别安装于两个半球壳的侧边以进行对应剪切配合的两个所述刀片以及安装在支架上且通过两个弧形连杆(11)分别驱动两个半球壳进行剪切运动的电推杆(7)。
2.根据权利要求1所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:所述两个半球壳通过穿过各自球心且同轴布置的两个铰轴(6)可转动地定位在两侧支架上。
3.根据权利要求2所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:两个半球壳为半径不同以避免发生运动干涉的内半球壳(2)和外半球壳(1);两个半球壳一侧边沿的赤道部位分别制作有突出于球面且制作有铰接孔的连杆接头,两个半球壳另一侧边沿分别制作有突出于球面以安装所述刀片用的刀片座。
4.根据权利要求3所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:所述外半球壳上开设有与连杆接头相适合的通槽(1.4),该通槽沿着外半球壳的赤道布置但与外半球壳的边沿保持距离;所述内半球壳上的内半球壳连杆接头(2.3)可活动地插入所述的通槽,且其上的铰接孔至内半球壳球心的距离与外半球壳连杆接头(1.3)上的铰接孔至外半球壳球心的距离相等。
5.根据权利要求4所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:所述两个弧形连杆的一端共同与电推杆上的伸缩杆(7.1)铰接,两个弧形连杆的另一端分别与所述的内半球壳连杆接头以及外半球壳连杆接头铰接。
6.根据权利要求5所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:所述刀片调节件为将刀片固定在刀片安装座上的刀片架。
7.根据权利要求6所述的通过球形包络和咬合断柄的柑橘采摘手,其特征在于:所述外半球壳上靠近连接头两侧开设有与内半球壳连杆接头对应配合的缺口(1.6),以防止工作时内半球壳刀片安装座与外半球壳发生干涉。
技术总结
本发明涉及一种农林机械,目的是提供一种通过球形包络和咬合断柄的柑橘末端采摘手;该采摘手应具有使用方便、工作效率高、结构紧凑以及制造成本低的特点。技术方案是一种通过球形包络和咬合断柄的柑橘采摘手,包括刀片;其特征在于:该柑橘采摘手还包括安装在支架上且可进行球形包络转动的两个半球壳、通过刀片调节件分别安装于两个半球壳的侧边以进行对应剪切配合的两个刀片以及安装在支架上且通过两个弧形连杆分别驱动两个半球壳进行剪切运动的电推杆。
技术研发人员:余煌,马锃宏,杜小强
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!