一种砍蔗机器人
本发明涉及甘蔗收割设备,具体涉及一种砍蔗机器人。
背景技术:
1、甘蔗是温带和热带农作物,是制造蔗糖的原料。甘蔗中含有丰富的糖分、水分,还含有对人体新陈代谢非常有益的各种维生素、脂肪、蛋白质、有机酸、钙、铁等物质,深受人们的喜爱。目前,传统甘蔗的收割基本上还是依靠人工来完成,不但劳动强大,而且生产效率很低,是一项艰苦的劳动,糖业及广大蔗农们迫切需要机械化的收割手段。
2、现有的甘蔗收割设备主要以大型的收割机为主;例如,申请公布号为cn102986369a的发明专利申请公开了一种前轮液压无级变速驱动行走的整杆式甘蔗收割机,收割机上设有驾驶室,需要载人进行对设收割机进行操作,且动力系统采用液压驱动,导致结构非常复杂,体积十分巨大,行动非常不方便,无法适应小型甘蔗田。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种砍蔗机器人,该机器人结构简单,小型轻便化,不需要载人,通过遥控器进行控制机器人本体运动,控制方便,可适用于小型甘蔗田。
2、本发明的目的通过以下技术方案实现:
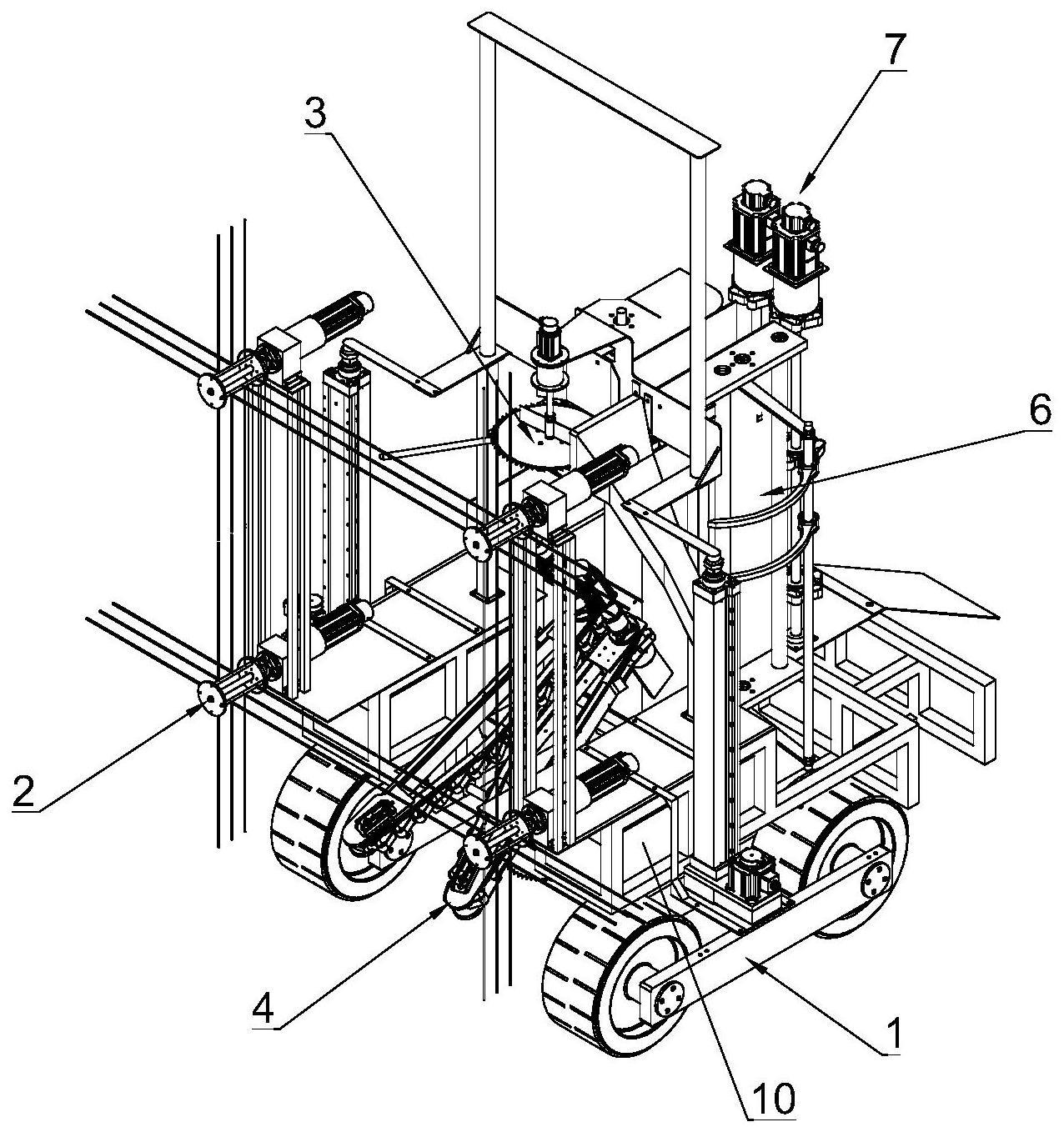
3、一种砍蔗机器人,包括遥控器以及机器人本体;所述遥控器和所述机器人本体通讯连接;其中,所述机器人本体包括底盘、设置在所述底盘上的剥叶装置、切梢装置、喂入装置、根切装置、打捆装置以及后处理排出装置;其中,所述剥叶装置用于将甘蔗叶进行剥离,所述切梢装置用于将甘蔗梢进行切断,所述喂入装置用于将甘蔗收拢并向后喂入打捆装置中,所述根切装置用于将甘蔗根进行切断,所述打捆装置用于将甘蔗进行打捆收集,所述后处理排出装置用于将打捆好的甘蔗向后排出至地面。
4、上述砍蔗机器人的工作原理是:
5、在甘蔗田中,通过遥控器控制机器人本体向前运动,当甘蔗接触到底盘前端的剥叶装置时,剥叶装置会将甘蔗叶进行剥离;随着机器人的继续前进,喂入装置会将甘蔗进行收拢并向后输送喂入,在此过程中,切梢装置将甘蔗梢进行切断,根切装置会将甘蔗杆切断,甘蔗通过切梢和根切处理后,喂入装置继续对切断的甘蔗进行向后输送,并喂入打捆装置中,打捆装置将甘蔗进行收集打捆,打捆完后的甘蔗通过后处理排出装置排出,使得甘蔗向后运动,最终落入地面上。
6、本发明的一个优选方案,其中,所述剥叶装置包括旋转安装件、设置在所述旋转安装件上的尼龙绳以及用于驱动所述旋转安装件转动以带动尼龙绳甩动的剥叶驱动机构。上述结构中,机器人本体向前运动时,剥叶驱动机构驱动旋转安装件转动,带动尼龙绳甩动,从而将甘蔗叶从甘蔗上剥落下来。
7、优选地,所述剥叶装置设有四组,所述底盘的前端设有两个剥叶安装架,每个所述剥叶安装架的上下两端各设有一组所述剥叶装置。上述结构中,四组剥叶装置呈对称设置,两个剥叶安装架分别位于底盘左右端,剥叶时,甘蔗位于两个剥叶安装架的中间,剥叶时,从甘蔗两侧进行甩动,可以提高甘蔗叶的剥离效果。
8、进一步地,所述旋转安装件包括工字盘以及设置在所述工字盘上的多个安装杆;多个安装杆沿着圆周方向均匀分布,每个安装杆上设有多个尼龙绳,多个尼龙绳沿着安装杆的轴线分布。通过设置上述结构,可以提高甘蔗叶的剥离效果。
9、进一步地,所述剥叶驱动机构包括转动安装在所述剥叶安装架上的剥叶联轴器以及与所述剥叶联轴器连接的剥叶驱动电机,所述剥叶联轴器与所述旋转安装件连接,具体地,所述剥叶联轴器与工字盘连接。通过剥叶驱动电机带动剥叶联轴器运动,从而带动旋转安装件转动,进而带动尼龙绳转动。
10、优选地,所述切梢装置包括收拢切梢模块以及用于调节所述收拢切梢模块的高度的提升机构;其中,所述收拢切梢模块包括竖直滑动设置在所述底盘上的滑动安装架、设置在所述滑动安装架上用于引导甘蔗进行收拢的收拢机构以及用于切断甘蔗梢的切梢机构。上述结构中,根据甘蔗的高度,通过提升机构对收拢切梢模块的高度进行调节,收割甘蔗时,通过收拢机构对甘蔗进行收拢,使得甘蔗梢也聚拢在一起,然后通过切梢机构将甘蔗梢切断。
11、优选地,所述收拢机构包括设置在所述滑动安装架底部的两个集蔗杆;两个集蔗杆呈八字型分布;所述切梢机构包括切梢驱动电机、切梢联轴器、切梢轴以及切梢锯片;所述切梢联轴器转动安装在所述滑动安装架的上端,所述切梢联轴器的上端与所述切梢驱动电机连接,下端与所述切梢轴的上端连接;所述切梢锯片设置在所述切梢轴的下端。上述切梢装置在工作时,首先通过集蔗杆对甘蔗进行收拢,切梢驱动电机驱动切梢联轴器转动,带动切梢轴转动,进而带动切梢锯片转动,对甘蔗的甘蔗梢进行切断。
12、优先地,所述切梢锯片的上方设有拨梢板,所述拨梢板安装在切梢轴上;所述滑动安装架的其中一侧设有集梢器。上述结构中,切梢锯片在切断甘蔗梢的过程中,拨梢板也会随着切梢轴旋转,转动的拨梢板会将切断的甘蔗梢拨到集梢器中,甘蔗梢会顺着集梢器的通道飞落至地面上。
13、进一步地,所述切梢轴与所述滑动安装架之间设有阻挡导向板;所述阻挡挡导向板固定在所述滑动安装架上。在切断甘蔗梢后,阻挡导向板可以对甘蔗梢进行阻挡并引导,在拨梢板的运动下,更好地将甘蔗梢拨到集梢器中。
14、优选地,所述提升机构包括设置在所述底盘两侧的电缸,所述电缸的上端与所述滑动安装架连接,所述电缸的下端与所述底盘连接。通过设置电缸,可以实现滑动安装架的上下运动,从而实现收拢切梢模块的高度调节,当甘蔗比较高时,所述电缸伸长,使得滑动安装架升高,使得收拢切梢模块升高;当甘蔗比较矮时,所述电缸缩短,使得滑动安装架降低,使得收拢切梢模块降低,以适应甘蔗高度,提高了甘蔗收割的灵活性。
15、优选地,所述喂入装置包括两组相互对称设置的引导输送机构,两组引导输送机构的前端形成喇叭状的开口;每组引导输送机构包括设置在底盘上的导向喂入架、主动链轮、从动链轮、喂入链、喂入联轴器以及喂入驱动电机;其中,所述主动链轮设置在导向喂入架的后端,所述从动链轮设置在导向喂入架的前端;所述喂入链连接在主动链轮与从动链轮之间,所述导向喂入架上设有用于引导喂入链运动的导向槽;所述喂入联轴器的上端与所述喂入驱动电机连接,下端与所述主动链轮连接;所述喂入链上设有多个第一橡胶圈。上述喂入装置的工作原理为:两个喂入驱动电机同时运动,分别驱动喂入联轴器运动,带动主动链轮转动,进而带动喂入链运动,从动链轮随着运动;喂入链会在导向槽的引导下进行运动,运动时,会带动第一橡胶圈运动;两组引导输送机构的前端形成喇叭状的开口,可以将甘蔗进行收拢,两侧的第一橡胶圈通过对甘蔗的摩擦,会带动甘蔗向后喂入,经过根切装置切断甘蔗根后,甘蔗会输送至打捆装置中。
16、进一步地,所述喂入装置呈倾斜向上设置,这样可以更好地将甘蔗输送至打捆装置中;所述第一橡胶圈为锥形第一橡胶圈,其目的在于,更好地对甘蔗进行喂入和输送。
17、优选地,所述根切装置设置在所述喂入装置的下方,所述根切装置包括设置在底盘下端的固定杆、设置在固定杆上的传动箱、与所述传动箱的输入端连接的根切驱动电机以及与所述传动箱的输出端连接根切刀片。上述结构中,随着底盘的前进以及喂入装置的收拢,根切驱动电机带动传动箱运动,进而带动根切刀片旋转,对甘蔗根进行切断,切断后,甘蔗会通过喂入装置向后喂入。
18、优选地,所述打捆装置设置在所述喂入装置与后处理排出装置之间,所述后处理排出装置包括两组对称设置在底盘上的排出机构以及设置在底盘后端的排出导向板;其中,每组所述排出机构包括转动设置在底盘上的排出旋转轴、设置在所述排出旋转轴上的多个排出轮、设置在排出旋转轴上端的排出联轴器以及用于驱动所述排出联轴器转动的排出驱动电机;每个所述排出轮上设有多个沿着圆周方向分布的第二橡胶圈。甘蔗经过打捆装置打捆后,排出驱动电机带动排出联轴器运动,进而带动排出旋转轴转动,从而带动排出轮转动,排出轮上的第二橡胶圈也跟着转动,在第二橡胶圈的摩擦作用下,带动打捆后的甘蔗向后运动,最后经过排出导向板的引导,打捆后的甘蔗落入地面上。
19、优选地,所述底盘为轮式差速底盘,所述底盘包括底盘架、设置在底盘架上的两个前轮、两个后轮以及用于驱动每个后轮转动的车轮驱动电机。上述结构中,前轮不设转向和和驱动,后轮通过车轮驱动电机进行行走,转向通过两个后轮的差速进行转向。
20、本发明与现有技术相比具有以下有益效果:
21、本发明中的砍蔗机器人,通过遥控器可以控制机器人本体运动,无需载人,通过剥叶装置、切梢装置、喂入装置、根切装置、打捆装置以及后处理排出装置可以实现甘蔗的剥叶、切梢、喂入、根切、打捆以及排出等功能,结构简单,体积小,控制方便,可适用于小型甘蔗田。
- 还没有人留言评论。精彩留言会获得点赞!