一种米草清除方法与流程
本发明涉及互花米草领域,更具体地,涉及一种米草清除方法。
背景技术:
1、我国多个沿海地区曾引进米草用于改善生态,但原有自然滩涂却在外来物种的影响下逐渐减退,我国浙江省、福建省、江苏省和广东省为了及时遏制上述环境问题的恶化,成立了专项资金用于清除米草。
2、由于现有米草的生长特性,使得生长于水中的米草根系异常发达,因此现有清除米草方法采用挖土机在水中进行直接挖掘,但是挖土机的自身重量过重,在清除过程中易反复陷于淤泥,导致清除米草的效率大大降低。因此,如何能够避免挖掘米草根系的工具陷入泥中并起到同等清除米草的效果,同时,清除后的米草根系要如何处理避免再次繁衍成为本领域亟待解决的问题。
技术实现思路
1、本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种米草清除方法,用于解决清除工具易陷,清除效果不佳,避免清理后的米草根系再次繁衍的问题。
2、本发明采取的技术方案是,一种米草清除方法,包括以下步骤:
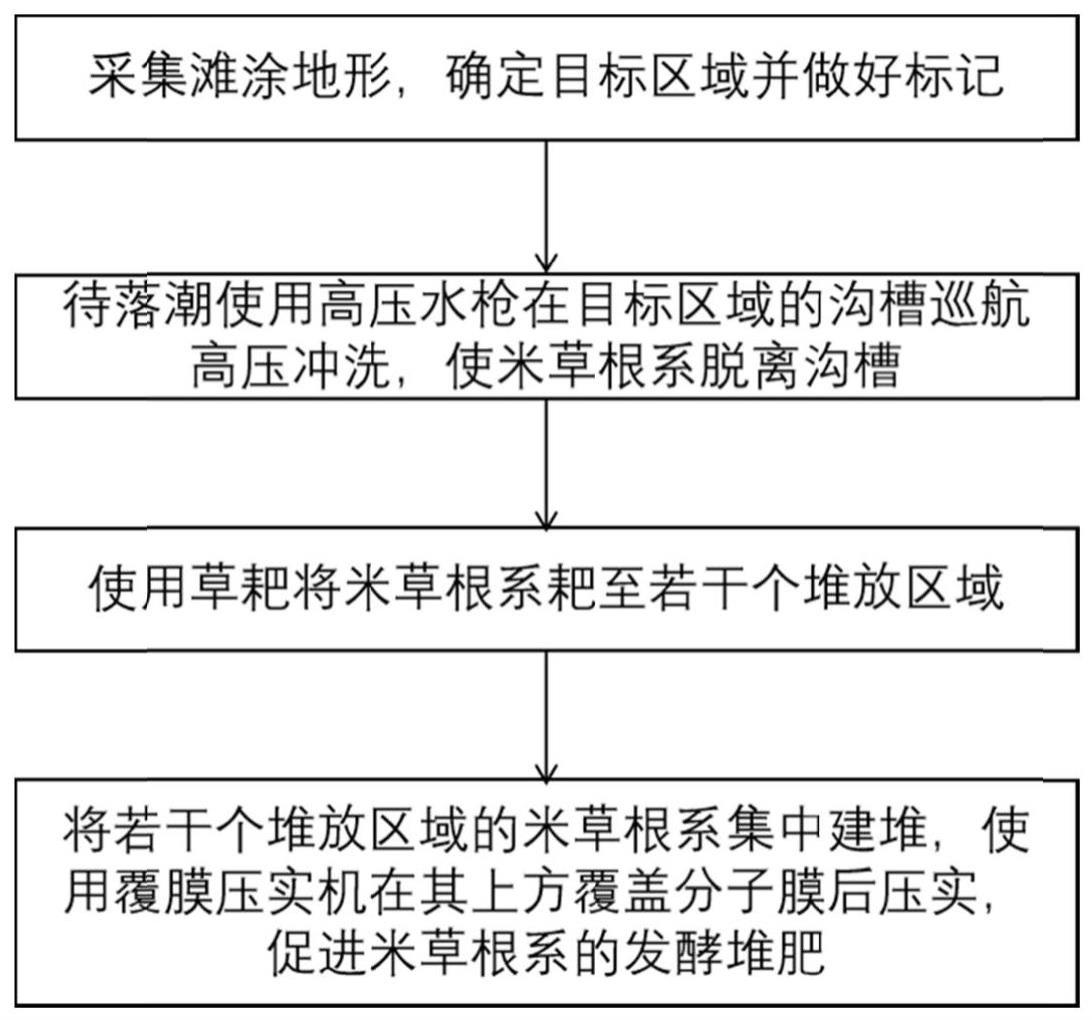
3、s1:采集滩涂地形,确定需要清除米草的目标区域并做好标记;
4、s2:落潮后使用高压水枪在目标区域的沟槽内进行巡航高压冲洗,使得米草根系脱离沟槽;
5、s3:使用草耙将脱离沟槽的米草根系从水中耙至若干个堆放区域;
6、s4:将若干个堆放区域的米草根系进行集中建堆,使用覆膜压实机在其上方覆盖分子膜后压实,促进米草根系的发酵堆肥。
7、有利于通过采集的地形分析确认目标区域,以缩小清除范围;有利于通过高压水枪的压力铲除米草根系的附着,同时避免清除工具陷于泥中;有利于通过草耙将铲除后的米草就近收集便于下一步的发酵堆肥;有利于通过建堆将铲除后的米草根系进行发酵堆肥,避免米草根系的再次发芽,提高清除米草的效果。
8、进一步的,所述s2中的巡航高压冲洗通过机器人完成,机器人在进入目标区域后按扫描式巡航路线划分为n个扫描冲洗区和n个端部堆放点。
9、有利于通过扫描冲洗区的划分确保机器人的清除过程中没有遗漏;有利于通过端部堆放点将铲除的米草进行就近堆放,以提升机器人的工作效率。
10、进一步的,所述s2包括:
11、s21:所述机器人由第1个端部堆放点开始,沿水平正方向在第1个扫描冲洗区内进行高压冲洗;
12、s22:冲洗后所述机器人沿水平反方向移动,并通过草耙将米草堆放至沿垂直方向分布的第1个端部堆放点;
13、s23:所述机器人沿垂直方向由第1个端部堆放点移动至第2个端部堆放点;
14、s24:重复s21至s23直至所述机器人完成n个扫描冲洗区的高压冲洗,以及n个端部堆放点都堆放有米草。
15、有利于通过机器人在目标区域中沿扫描冲洗区来回移动确保米草的彻底清除;有利于通过机器人沿单方向在n个端部堆放点之间移动,以减少机器人的移动时间。
16、进一步的,所述s1中的目标区域被标记后依据米草生长密度进行等级划分,将目标区域分为高密度区、中密度区和低密度区。
17、有利于通过不同等级的目标区域分配数量不同的机器人,以缩短需要清除生长茂盛的米草区域的时间,从而提高米草清除的工作效率。
18、进一步的,所述机器人在n个扫描冲洗区根据米草生长密度自动调节冲洗功率。
19、有利于通过可调节功率的机器人在米草生长密度不同的地方施加不同的冲洗力,以实现最佳的米草清除效果。
20、进一步的,所述机器人在高密度区的移动速度为v1,冲洗功率为p1;在中密度区的移动速度为v2,冲洗功率为p2;在低密度区的移动速度为v3,冲洗功率为p1。
21、有利于通过机器人在不同米草生长密度的目标区域匹配不同的移动速度和冲洗功率,以实现米草的彻底清除。
22、进一步的,v1<v2<v3,p1>p2>p3。
23、有利于通过机器人在高密度区的慢速移动和大功率冲洗实现米草的彻底清除效果,有利于通过机器人在低密度区的高速移动和小功率冲洗实现节能效果。
24、进一步的,所述s3中的若干个堆放区域中的米草被集中堆放至总堆放区,所述总堆放区按米草密集程度堆放为大、中、小堆体。
25、有利于通过收集若干个堆放区域的米草至总堆放区便于清除后的米草根系的集中处理,有利于通过总堆放区的堆体的大小程度来匹配不同的堆肥方案,以实现每个不同大小的堆体都能彻底腐熟。
26、进一步的,通过所述草耙将总堆放区的米草根系耙至厚薄均匀,并根据不同的堆体晾晒多余水分,加入辅料调节大、中、小堆体的碳氮比,混合均匀后建堆并连接至堆肥监控系统。
27、有利于通过草耙将米草耙散以实现建堆前的米草根系的水分保持在适宜堆肥的水平,有利于通过不同大小的堆体调节不同的碳氢比以实现不同大小的堆体的彻底腐熟,有利于通过连接的堆肥监控系统监测堆肥状态。
28、进一步的,所述堆肥监控系统包括导流槽、温度传感器和氧气传感器,所述导流槽用于集中收集所述堆体生成的肥料,所述温度传感器用于监测所述堆体中的温度,所述氧气传感器用于监测所述堆体中的含氧量。
29、有利于通过连接的堆肥监控系统监控不同大小的堆体的堆肥状态,以及时观测和调整堆体,从而提升腐熟效果。
30、与现有技术相比,本发明的有益效果为:避免了挖掘机清除米草的易陷泥坑,提升了清除米草的便捷性,实现了大范围米草清除效果的提升,避免清理后的米草根系再次繁衍的效果。
技术特征:
1.一种米草清除方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种米草清除方法,其特征在于,所述s2中的巡航高压冲洗通过机器人完成,机器人在进入目标区域后按扫描式巡航路线划分为n个扫描冲洗区和n个端部堆放点。
3.根据权利要求2所述的一种米草清除方法,其特征在于,所述s2包括:
4.根据权利要求3所述的一种米草清除方法,其特征在于,所述s1中的目标区域被标记后依据米草生长密度进行等级划分,将目标区域分为高密度区、中密度区和低密度区。
5.根据权利要求3所述的一种米草清除方法,其特征在于,所述机器人在n个扫描冲洗区根据米草生长密度自动调节冲洗功率。
6.根据权利要求4-5任一项所述的一种米草清除方法,其特征在于,所述机器人在高密度区的移动速度为v1,冲洗功率为p1;在中密度区的移动速度为v2,冲洗功率为p2;在低密度区的移动速度为v3,冲洗功率为p1。
7.根据权利要求6所述的一种米草清除方法,其特征在于,v1<v2<v3,p1>p2>p3。
8.根据权利要求6所述的一种米草清除方法,其特征在于,所述s3中的若干个堆放区域中的米草被集中堆放至总堆放区,所述总堆放区按米草密集程度堆放为大、中、小堆体。
9.根据权利要求8所述的一种米草清除方法,其特征在于,通过所述草耙将总堆放区的米草根系耙至厚薄均匀,并根据不同的堆体晾晒多余水分,加入辅料调节大、中、小堆体的碳氮比,混合均匀后建堆并连接至堆肥监控系统。
10.根据权利要求9所述的一种米草清除方法,其特征在于,所述堆肥监控系统包括导流槽、温度传感器和氧气传感器,所述导流槽用于集中收集所述堆体生成的肥料,所述温度传感器用于监测所述堆体中的温度,所述氧气传感器用于监测所述堆体中的含氧量。
技术总结
本发明涉及互花米草领域,更具体地,涉及一种米草清除方法,通过采集滩涂地形,确定需要清除米草的目标区域并做好标记;落潮后使用高压水枪在目标区域的沟槽内进行巡航高压冲洗,使得米草根系脱离沟槽;使用草耙将脱离沟槽的米草根系从水中耙至若干个堆放区域;将若干个堆放区域的米草根系进行集中建堆,使用覆膜压实机在其上方覆盖分子膜后压实,促进米草根系的发酵堆肥的方法;用于解决清除工具易陷,清除效果不佳,避免清理后的米草根系再次繁衍的问题;避免了挖掘机清除米草的易陷泥坑,提升了清除米草的便捷性,实现了大范围米草清除效果的提升,避免清理后的米草根系再次繁衍的效果。
技术研发人员:李旭光,王莹,谭永鉴,高洁,姬日业,陈容,潘海萍,陈腾利
受保护的技术使用者:广州和时通电子科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!